ı can run
sim_vehicle.py -v ArduPlane -f plane-vtail --console
and ı can connect to QGroundControl and ı complete missions. however ı want to 3D simülation. ı use gazebo and ı can run zephyr and iris in gazebo and ı can connect these models SITL and QGC. ı want to do same thing for v-tail. but ı have not v-tail model on gazebo. how can ı get v-tail modle for gazebo.
hellow, i am halit şen. we told in discord. we prareper some files. but we did not send files on ardupilot discourse. because our files is too big. so we shared them with google drive. this is drive link
Hi @halitsen, thanks for the link to the files. In the end I retrieved the original CAD files to generate the visuals and collisions for the model. It’s necessary to significantly reduce the size of the mesh files and the best way to do this is to export collada files from the source retaining all the intermediate nodes so they can be decimated or removed as necessary.
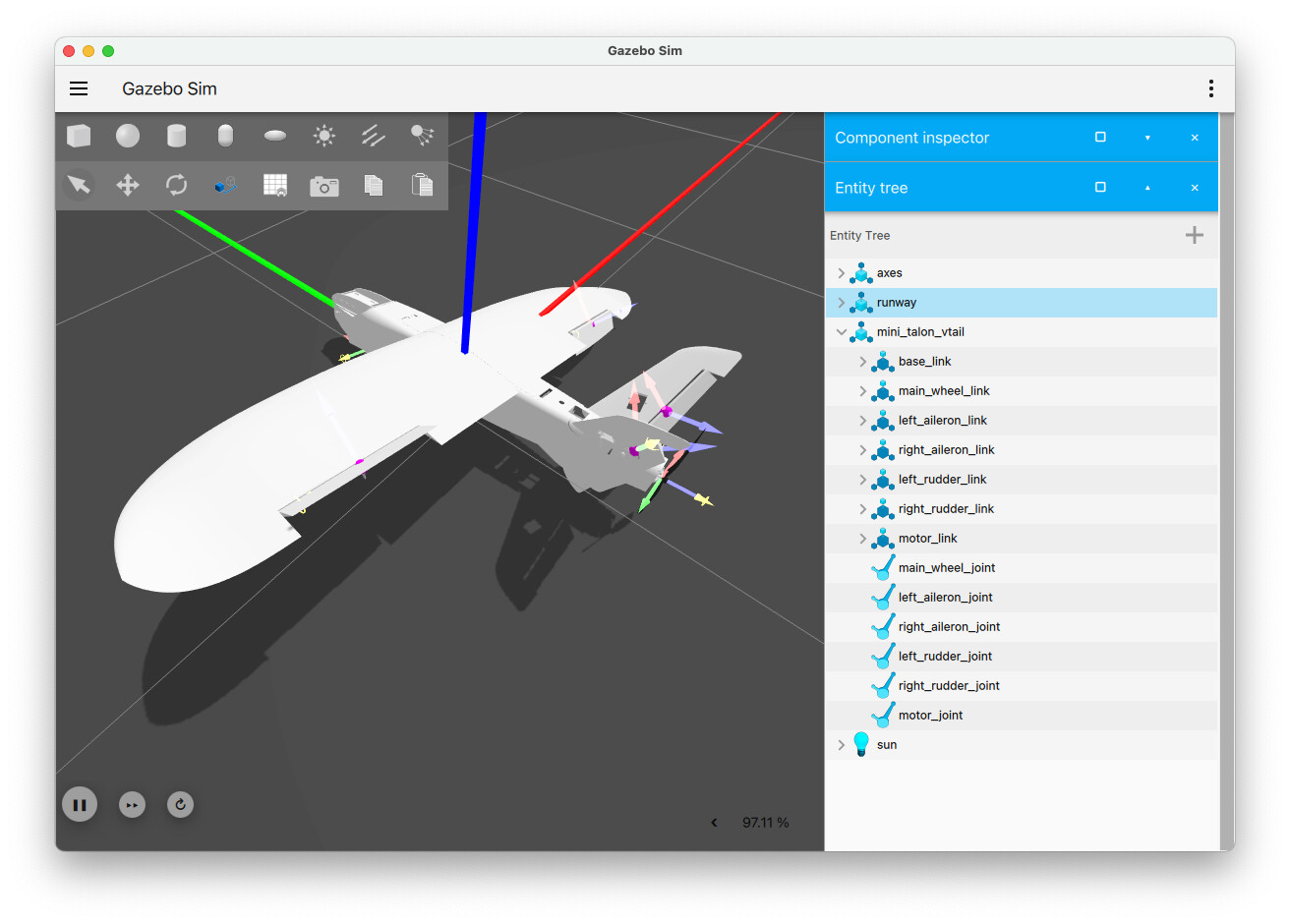
Here is a link to a draft PR of the model: SITL_Models/ at wips/wip-mini-talon · srmainwaring/SITL_Models · GitHub
- Model is rigged with controllers in place for the actuated joints.
- Mass and inertials are placeholders only. i.e. not correct or calibrated.
- Missing lift-drag plugins and configuration.
- Missing ardupilot plugin and configuration.
The control surfaces can be commanded with:
gz topic -t /left_aileron_joint/cmd_pos -m gz.msgs.Double -p 'data: 1'
gz topic -t /right_aileron_joint/cmd_pos -m gz.msgs.Double -p 'data: 1'
gz topic -t /left_ruddervator_joint/cmd_pos -m gz.msgs.Double -p 'data: 1'
gz topic -t /right_ruddervator_joint/cmd_pos -m gz.msgs.Double -p 'data: 1'
The thrust is controlled with:
gz topic -t /model/mini_talon_vtail/joint/motor_joint/cmd_vel -m gz.msgs.Double -p 'data: 100'
Hello, thank you for the model. We are very excited to try the model. but there is a problem, when we enter the following command in the terminal in ubuntu 20.04, we get an error like this.
command :
“gazebo --verbose /home/halit/SITL_Models-571704a4a1f5b70c0f28148d7a16864902cbaf82/Gazebo/worlds/vtail_runway.sdf”
error:
[Wrn] [ModelDatabase.cc:340] Getting models from[http://models.gazebosim.org/]. This may take a few seconds.
c[Wrn] [SystemPaths.cc:459] File or path does not exist [“”] [model://runway]
[Wrn] [SystemPaths.cc:459] File or path does not exist [“”] [model://mini_talon_vtail]
Error Code 12 Msg: Unable to find uri[model://runway]
Error Code 12 Msg: Unable to find uri[model://mini_talon_vtail]
[Msg] Loading world file [/home/halit/SITL_Models-571704a4a1f5b70c0f28148d7a16864902cbaf82/Gazebo/worlds/vtail_runway.sdf]
[Err] [PhysicsFactory.cc:90] Invalid Physics Type[ignore]
[Err] [World.cc:353] EXCEPTION: Unable to create physics engine
[Err] [Server.cc:577] EXCEPTION: Failed to load the World
Unable to create physics engine
[Err] [Server.cc:577] EXCEPTION: Failed to load the World
Unable to create physics engine
halit@halitsen:~$
Rhys Mainwaring via ArduPilot Discourse <noreply@ardupilot.org>, 4 Tem 2023 Sal, 20:13 tarihinde şunu yazdı:
Looks like you don’t have GZ_SIM_RESOURCE_PATH set correctly. Make sure that you export
- GZ_SIM_RESOURCE_PATH
- GZ_SIM_SYSTEM_PLUGIN_PATH
to include the location of the additional models, worlds and plugins for both ardupilot_gazebo and SITL_Models.
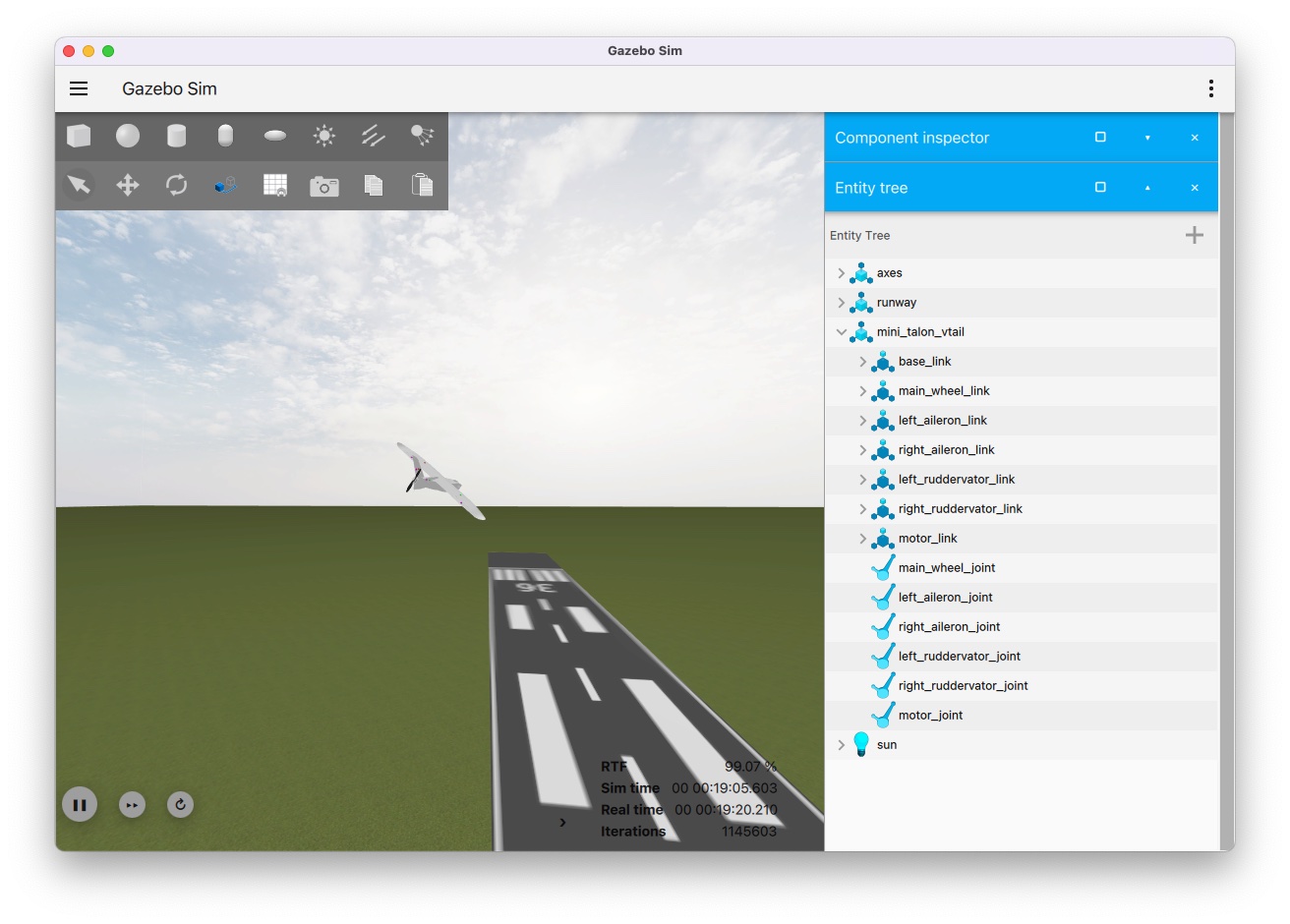
Btw - the model is now fully set up, but not tuned, i.e. it will takeoff but is not stable in flight as the joint controllers in Gazebo and attitude controllers in ArduPilot are not tuned.
Update - initial autotune completed and tested flights in FBWA, LOITER and AUTO. The param file is: SITL_Models/Gazebo/config/mini_talon_vtail.param.
Figure: mini-talon v-tail flying a mission in AUTO.
thank you
Rhys Mainwaring via ArduPilot Discourse <noreply@ardupilot.org>, 6 Tem 2023 Per, 00:49 tarihinde şunu yazdı:
Let me know if you have any probs getting the vehicle to fly. Here are some tests you can run to check the model is working properly:
Preflight checks (run in MAVProxy):
# roll right - left aileron down, right aileron up
MANUAL> rc 1 1900
# pitch up - left and right ruddervators up
MANUAL> rc 2 1900
# yaw right - left ruddervator up, right ruddervator down
MANUAL> rc 4 1900
# motor test - prop spins ccw when viewed from back
MANUAL> arm throttle
MANUAL> rc 3 1110
Takeoff and loiter:
MANUAL> fbwa
FBWA> arm throttle
FBWA> rc 3 1800
# pitch up when speed reaches approx. 13 m/s
FBWA> rc 2 1600
# switch to loiter when alt reaches 100 m
FBWA> loiter
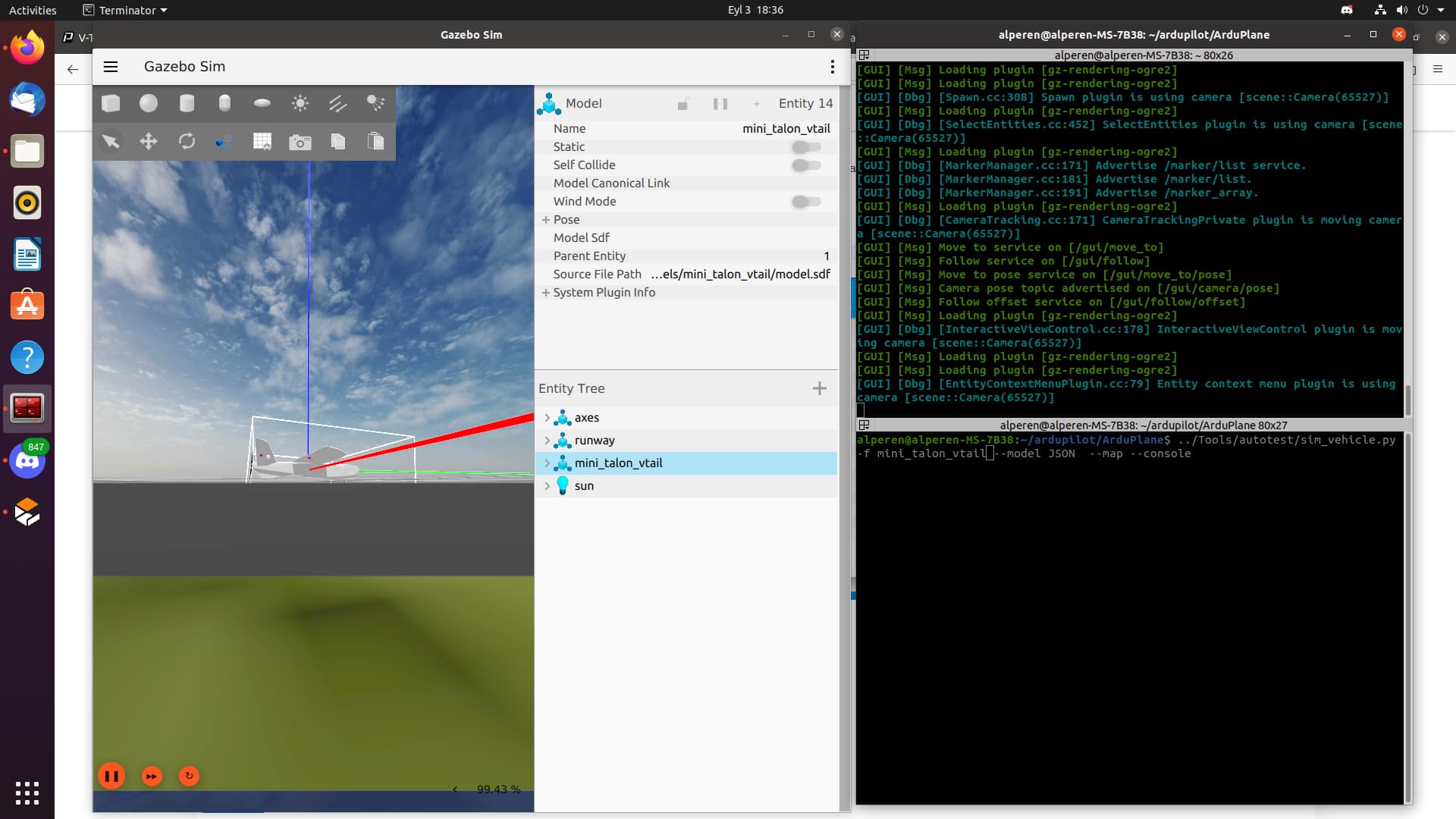
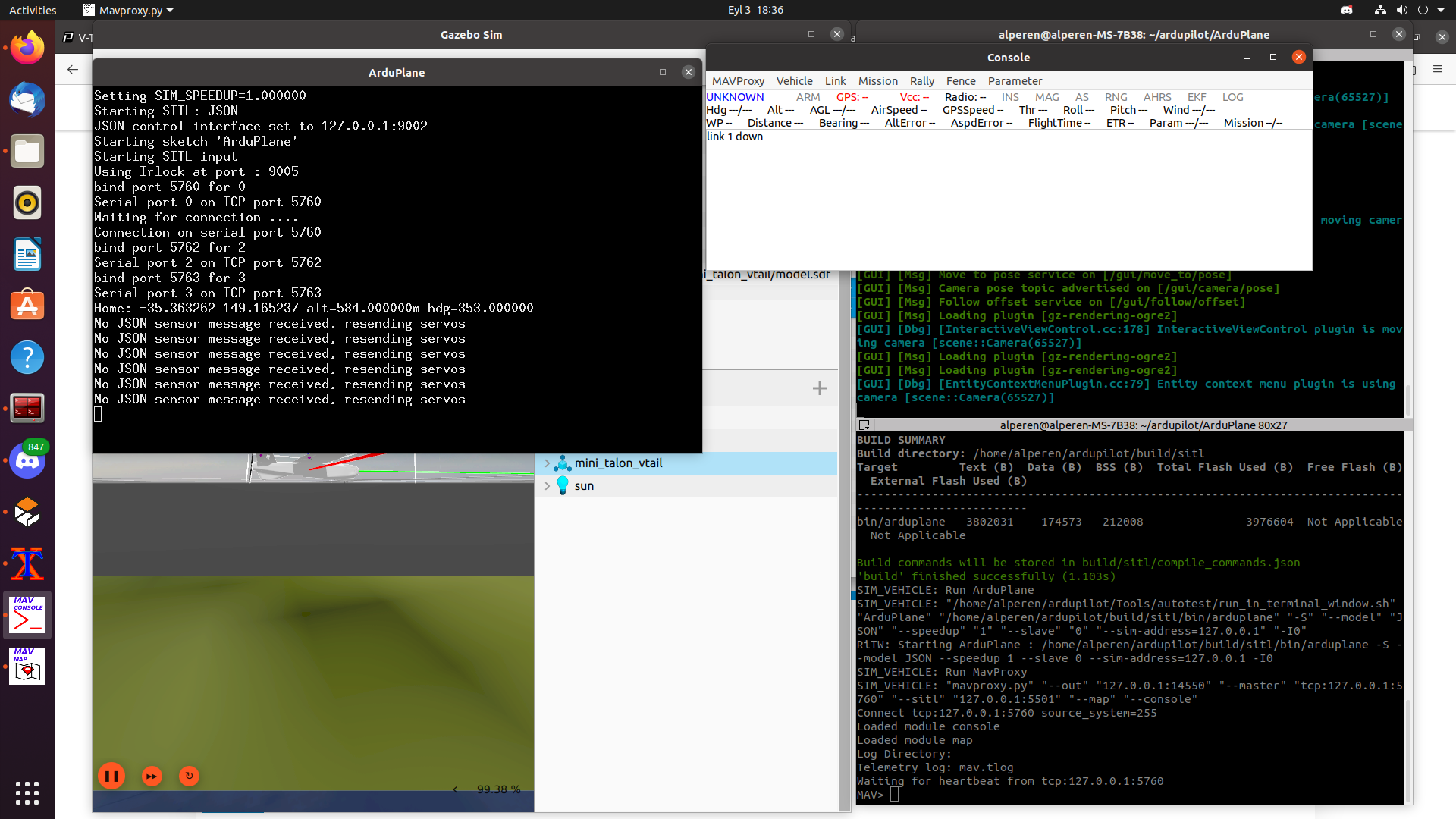
Bro please help me. I can run the talon model in Gazebo, there is no problem, but I cannot make the mavlink connection. I can make the mavlink connection of other models, but as seen in the terminal screen below, no matter what I type in the name section, there is no mavlink connection. I even wrote the model as path but it does not work.
Hi @ALPEREN_OZYUKSEL - did you get the answer you needed from Discord?
Hi, is there any update on this error? Could you solve it?
hi @rhys
i got the model from the link you left up there
it works okay by itself but there is no file such as mini_talon_vtail.param in SITL_Models/Gazebo/config directory
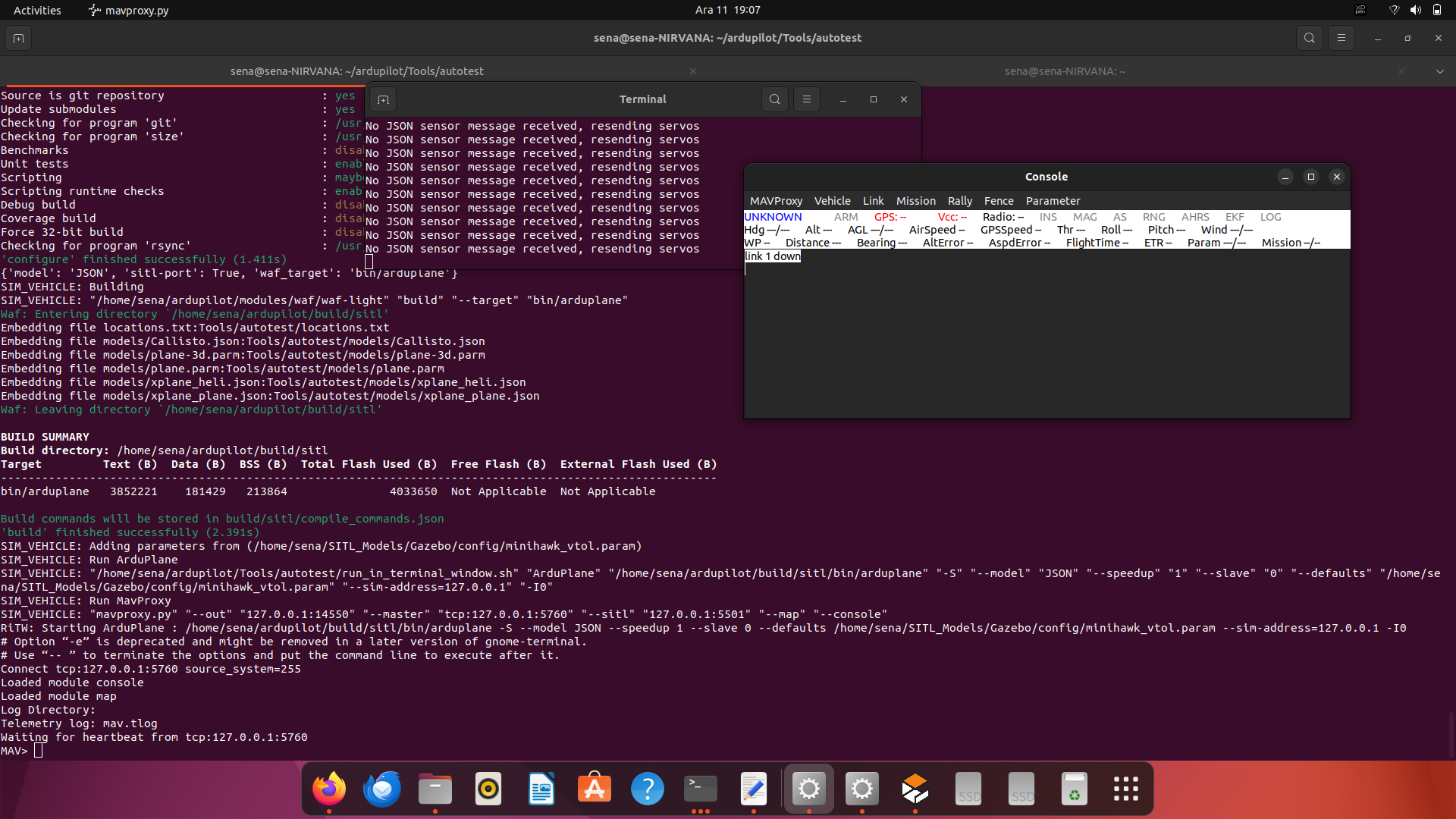
i tried to download randomly but ended up getting No JSON sensor message received, resending servos error can i ask where you get the vtail param file from
Hi @ssmenekse, you need to get the param file from the branch referenced in the PR as it is not yet merged into main. The parameter file is here: https://github.com/srmainwaring/SITL_Models/blob/prs/pr-minihawk-vtol/Gazebo/config/minihawk_vtol.param
@rhys thank you for your quick respond and i m still working on this No JSON sensor message received, resending servos dude :,)
@ssmenekse, looks like the Gazebo session is not sending data back to the SITL session. Can you post full console logs from the SITL session and Gazebo. Run gz sim with the -v4 flag to display debug info. I suspect the ArduPilot plugin is not being loaded because the path is not correctly set, but need logs to confirm.
@rhys i think the problem is i couldn’t do config for the ardupilot plugins i added in sdf file
@ssmenekse, have you solved your issue or is it still not working?
If you want some help post the logs and I’ll take a look.
~$ gz sim vtail_runway.sdf
Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.
[Err] [SDFFeatures.cc:843] The geometry element of collision [fuselage_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_wing_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_wing_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_tail_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_tail_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [main_wheel_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_aileron_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_aileron_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_rudder_collision] couldn’t be created
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_rudder_collision] couldn’t be created
^Csena@sena-NIRVANA:~gz sim -v4 -r vtail_runway.sdfdf
[Msg] Gazebo Sim GUI v7.6.0
[Dbg] [gz.cc:165] Subscribing to [/gazebo/starting_world].
[Dbg] [gz.cc:167] Waiting for a world to be set from the GUI…
[Dbg] [Gui.cc:261] Waiting for subscribers to [/gazebo/starting_world]…
[Msg] Received world [vtail_runway.sdf] from the GUI.
[Dbg] [gz.cc:171] Unsubscribing from [/gazebo/starting_world].
[Msg] Gazebo Sim Server v7.6.0
Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.
[Msg] Loading SDF world file[/home/sena/gz_ws/src/ardupilot_gazebo/worlds/vtail_runway.sdf].
[Dbg] [Application.cc:96] Initializing application.
[Dbg] [Application.cc:128] Qt using OpenGL graphics interface
[GUI] [Dbg] [Application.cc:607] Create main window
[Msg] Serving entity system service on [/entity/system/add]
[Dbg] [Physics.cc:880] Loaded [gz::physics::dartsim::Plugin] from library [/usr/lib/x86_64-linux-gnu/gz-physics-6/engine-plugins/libgz-physics-dartsim-plugin.so]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::Physics] for entity [1]
[Msg] Create service on [/world/runway/create]
[Msg] Remove service on [/world/runway/remove]
[Msg] Pose service on [/world/runway/set_pose]
[Msg] Pose service on [/world/runway/set_pose_vector]
[Msg] Light configuration service on [/world/runway/light_config]
[Msg] Physics service on [/world/runway/set_physics]
[Msg] SphericalCoordinates service on [/world/runway/set_spherical_coordinates]
[Msg] Enable collision service on [/world/runway/enable_collision]
[Msg] Disable collision service on [/world/runway/disable_collision]
[Msg] Material service on [/world/runway/visual_config]
[Msg] Material service on [/world/runway/wheel_slip]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::UserCommands] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::SceneBroadcaster] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::Imu] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::NavSat] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointStatePublisher] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/left_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [5]
[Dbg] [JointPositionController.cc:304] i_gain: [0.5]
[Dbg] [JointPositionController.cc:305] d_gain: [0.5]
[Dbg] [JointPositionController.cc:306] i_max: [5]
[Dbg] [JointPositionController.cc:307] i_min: [-5]
[Dbg] [JointPositionController.cc:308] cmd_max: [200]
[Dbg] [JointPositionController.cc:309] cmd_min: [-200]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/left_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/right_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [5]
[Dbg] [JointPositionController.cc:304] i_gain: [0.5]
[Dbg] [JointPositionController.cc:305] d_gain: [0.5]
[Dbg] [JointPositionController.cc:306] i_max: [5]
[Dbg] [JointPositionController.cc:307] i_min: [-5]
[Dbg] [JointPositionController.cc:308] cmd_max: [200]
[Dbg] [JointPositionController.cc:309] cmd_min: [-200]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/right_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/left_rudder_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [5]
[Dbg] [JointPositionController.cc:304] i_gain: [0.5]
[Dbg] [JointPositionController.cc:305] d_gain: [0.5]
[Dbg] [JointPositionController.cc:306] i_max: [5]
[Dbg] [JointPositionController.cc:307] i_min: [-5]
[Dbg] [JointPositionController.cc:308] cmd_max: [200]
[Dbg] [JointPositionController.cc:309] cmd_min: [-200]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/left_rudder_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/right_rudder_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [5]
[Dbg] [JointPositionController.cc:304] i_gain: [0.5]
[Dbg] [JointPositionController.cc:305] d_gain: [0.5]
[Dbg] [JointPositionController.cc:306] i_max: [5]
[Dbg] [JointPositionController.cc:307] i_min: [-5]
[Dbg] [JointPositionController.cc:308] cmd_max: [200]
[Dbg] [JointPositionController.cc:309] cmd_min: [-200]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/right_rudder_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Dbg] [Thruster.cc:390] Using angular velocity mode
[Msg] Thruster listening to commands on [/model/mini_talon_vtail/joint/motor_joint/cmd_vel]
[Msg] Thruster listening to enable_deadband on [/model/mini_talon_vtail/joint/motor_joint/enable_deadband]
[Dbg] [Thruster.cc:460] Using PID controller for propeller joint.
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::Thruster] for entity [14]
[Msg] Loaded level [3]
[Msg] Serving world controls on [/world/runway/control], [/world/runway/control/state] and [/world/runway/playback/control]
[Msg] Serving GUI information on [/world/runway/gui/info]
[Msg] World [runway] initialized with [1ms] physics profile.
[Msg] Serving world SDF generation service on [/world/runway/generate_world_sdf]
[Msg] Serving world names on [/gazebo/worlds]
[Msg] Resource path add service on [/gazebo/resource_paths/add].
[Msg] Resource path get service on [/gazebo/resource_paths/get].
[Msg] Resource path resolve service on [/gazebo/resource_paths/resolve].
[Msg] Resource paths published on [/gazebo/resource_paths].
[Msg] Server control service on [/server_control].
[GUI] [Dbg] [PathManager.cc:67] Requesting resource paths through [/gazebo/resource_paths/get]
[GUI] [Dbg] [Gui.cc:341] GUI requesting list of world names. The server may be busy downloading resources. Please be patient.
[GUI] [Dbg] [PathManager.cc:56] Received resource paths.
[GUI] [Dbg] [Gui.cc:399] Requesting GUI from [/world/runway/gui/info]…
[GUI] [Dbg] [GuiRunner.cc:149] Requesting initial state from [/world/runway/state]…
[GUI] [Msg] Loading config [/home/sena/.gz/sim/7/gui.config]
[GUI] [Dbg] [Application.cc:459] Loading plugin [MinimalScene]
[GUI] [Dbg] [MinimalScene.cc:657] Creating gz-rendering interface for OpenGL
[GUI] [Dbg] [MinimalScene.cc:657] Creating gz-rendering interface for OpenGL
[GUI] [Dbg] [MinimalScene.cc:817] Creating render thread interface for OpenGL
[GUI] [Msg] Added plugin [3D View] to main window
[GUI] [Msg] Loaded plugin [MinimalScene] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libMinimalScene.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [EntityContextMenuPlugin]
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Msg] Added plugin [Entity Context Menu] to main window
[GUI] [Msg] Loaded plugin [EntityContextMenuPlugin] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libEntityContextMenuPlugin.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [GzSceneManager]
[GUI] [Msg] Added plugin [Scene Manager] to main window
[GUI] [Msg] Loaded plugin [GzSceneManager] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libGzSceneManager.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [InteractiveViewControl]
[GUI] [Msg] Camera view controller topic advertised on [/gui/camera/view_control]
[GUI] [Msg] Camera reference visual topic advertised on [/gui/camera/view_control/reference_visual]
[GUI] [Msg] Camera view control sensitivity advertised on [/gui/camera/view_control/sensitivity]
[GUI] [Msg] Added plugin [Interactive view control] to main window
[GUI] [Msg] Loaded plugin [InteractiveViewControl] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libInteractiveViewControl.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [CameraTracking]
[GUI] [Msg] Added plugin [Camera tracking] to main window
[GUI] [Msg] Loaded plugin [CameraTracking] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libCameraTracking.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [MarkerManager]
[GUI] [Msg] Listening to stats on [/world/runway/stats]
[GUI] [Msg] Added plugin [Marker Manager] to main window
[GUI] [Msg] Loaded plugin [MarkerManager] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libMarkerManager.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [SelectEntities]
[GUI] [Msg] Added plugin [Select entities] to main window
[GUI] [Msg] Loaded plugin [SelectEntities] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libSelectEntities.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [Spawn]
[GUI] [Msg] Added plugin [Spawn] to main window
[GUI] [Msg] Loaded plugin [Spawn] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libSpawn.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [VisualizationCapabilities]
[GUI] [Msg] View as transparent service on [/gui/view/transparent]
[GUI] [Msg] View as wireframes service on [/gui/view/wireframes]
[GUI] [Msg] View center of mass service on [/gui/view/com]
[GUI] [Msg] View inertia service on [/gui/view/inertia]
[GUI] [Msg] View collisions service on [/gui/view/collisions]
[GUI] [Msg] View joints service on [/gui/view/joints]
[GUI] [Msg] View frames service on [/gui/view/frames]
[GUI] [Msg] Added plugin [Visualization capabilities] to main window
[GUI] [Msg] Loaded plugin [VisualizationCapabilities] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libVisualizationCapabilities.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [WorldControl]
[GUI] [Msg] Using world control service [/world/runway/control]
[GUI] [Msg] Listening to stats on [/world/runway/stats]
[GUI] [Dbg] [WorldControl.cc:250] Using an event to share WorldControl msgs with the server
[GUI] [Msg] Added plugin [World control] to main window
[GUI] [Msg] Loaded plugin [WorldControl] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libWorldControl.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [WorldStats]
[GUI] [Msg] Listening to stats on [/world/runway/stats]
[GUI] [Msg] Added plugin [World stats] to main window
[GUI] [Msg] Loaded plugin [WorldStats] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libWorldStats.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [Shapes]
[GUI] [Msg] Added plugin [Shapes] to main window
[GUI] [Msg] Loaded plugin [Shapes] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libShapes.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [Lights]
[GUI] [Msg] Added plugin [Lights] to main window
[GUI] [Msg] Loaded plugin [Lights] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libLights.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [TransformControl]
[GUI] [Msg] Added plugin [Transform control] to main window
[GUI] [Msg] Loaded plugin [TransformControl] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libTransformControl.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [Screenshot]
[GUI] [Msg] Screenshot service on [/gui/screenshot]
[GUI] [Msg] Added plugin [Screenshot] to main window
[GUI] [Msg] Loaded plugin [Screenshot] from path [/usr/lib/x86_64-linux-gnu/gz-gui-7/plugins/libScreenshot.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [CopyPaste]
[GUI] [Msg] Added plugin [Copy/Paste] to main window
[GUI] [Msg] Loaded plugin [CopyPaste] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libCopyPaste.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [ComponentInspector]
[GUI] [Msg] Added plugin [Component inspector] to main window
[GUI] [Msg] Loaded plugin [ComponentInspector] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libComponentInspector.so]
[GUI] [Dbg] [Application.cc:459] Loading plugin [EntityTree]
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityTree/EntityTree.qml:148:7: QML ToolButton: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Msg] Added plugin [Entity tree] to main window
[GUI] [Msg] Loaded plugin [EntityTree] from path [/usr/lib/x86_64-linux-gnu/gz-sim-7/plugins/gui/libEntityTree.so]
[GUI] [Dbg] [Application.cc:329] Loading window config
[GUI] [Msg] Using server control service [/server_control]
[GUI] [Dbg] [Application.cc:621] Applying config
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityTree/EntityTree.qml:148:7: QML ToolButton: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/WorldStats/WorldStats.qml:53:3: QML RowLayout: Binding loop detected for property “x”
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:52:3: QML RenderWindowOverlay: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Wrn] [Application.cc:859] [QT] file::/EntityContextMenuPlugin/EntityContextMenuPlugin.qml:67:3: QML EntityContextMenu: Detected anchors on an item that is managed by a layout. This is undefined behavior; use Layout.alignment instead.
[GUI] [Dbg] [MinimalScene.cc:657] Creating gz-rendering interface for OpenGL
[GUI] [Dbg] [MinimalScene.cc:817] Creating render thread interface for OpenGL
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [MinimalScene.cc:606] Create scene [scene]
[Msg] Found no publishers on /stats, adding root stats topic
[Msg] Found no publishers on /clock, adding root clock topic
[Dbg] [SimulationRunner.cc:503] Creating PostUpdate worker threads: 6
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (0)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (1)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (2)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (3)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (4)
[Dbg] [JointPositionController.cc:361] Identified joint [left_aileron_joint] as Entity [55]
[Dbg] [JointPositionController.cc:361] Identified joint [right_aileron_joint] as Entity [56]
[Dbg] [JointPositionController.cc:361] Identified joint [left_rudder_joint] as Entity [57]
[Dbg] [JointPositionController.cc:361] Identified joint [right_rudder_joint] as Entity [58]
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [fuselage_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_wing_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_wing_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_tail_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_tail_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [main_wheel_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_aileron_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_aileron_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_rudder_collision] couldn’t be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_rudder_collision] couldn’t be created
[Dbg] [ImuSensor.cc:149] IMU data for [mini_talon_vtail::base_link::imu_sensor] advertised on [world/runway/model/mini_talon_vtail/link/base_link/sensor/imu_sensor/imu]
[Msg] Serving scene information on [/world/runway/scene/info]
[Msg] Serving graph information on [/world/runway/scene/graph]
[Msg] Serving full state on [/world/runway/state]
[Msg] Serving full state (async) on [/world/runway/state_async]
[Msg] Publishing scene information on [/world/runway/scene/info]
[Msg] Publishing entity deletions on [/world/runway/scene/deletion]
[Msg] Publishing state changes on [/world/runway/state]
[Msg] Publishing pose messages on [/world/runway/pose/info]
[Msg] Publishing dynamic pose messages on [/world/runway/dynamic_pose/info]
[Dbg] [EntityComponentManager.cc:1655] Updated state thread iterators: 12 threads processing around 6 entities each.
[GUI] [Dbg] [MinimalScene.cc:849] Creating texture node render interface for OpenGL
[Wrn] [Component.hh:144] Trying to serialize component with data type [N3sdf3v135WorldE], which doesn’t have
operator<<. Component will not be serialized.[Wrn] [Model.hh:69] Skipping serialization / deserialization for models with //pose/@relative_to attribute.
[Wrn] [Component.hh:144] Trying to serialize component with data type [St6vectorIdSaIdEE], which doesn’t have
operator<<. Component will not be serialized.[GUI] [Wrn] [Component.hh:189] Trying to deserialize component with data type [N3sdf3v135WorldE], which doesn’t have
operator>>. Component will not be deserialized.[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [TransformControl.cc:453] TransformControl plugin is using camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [Spawn.cc:308] Spawn plugin is using camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [SelectEntities.cc:452] SelectEntities plugin is using camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [MarkerManager.cc:171] Advertise /marker/list service.
[GUI] [Dbg] [MarkerManager.cc:181] Advertise /marker/list.
[GUI] [Dbg] [MarkerManager.cc:191] Advertise /marker_array.
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [CameraTracking.cc:171] CameraTrackingPrivate plugin is moving camera [scene::Camera(65527)]
[GUI] [Msg] Move to service on [/gui/move_to]
[GUI] [Msg] Follow service on [/gui/follow]
[GUI] [Msg] Move to pose service on [/gui/move_to/pose]
[GUI] [Msg] Camera pose topic advertised on [/gui/camera/pose]
[GUI] [Msg] Follow offset service on [/gui/follow/offset]
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [InteractiveViewControl.cc:178] InteractiveViewControl plugin is moving camera [scene::Camera(65527)]
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Msg] Loading plugin [gz-rendering-ogre2]
[GUI] [Dbg] [EntityContextMenuPlugin.cc:79] Entity context menu plugin is using camera [scene::Camera(65527)]
[GUI] [Wrn] [Model.hh:98] Unable to deserialize sdf::Model
[GUI] [Wrn] [Model.hh:98] Unable to deserialize sdf::Model
[GUI] [Wrn] [Component.hh:189] Trying to deserialize component with data type [St6vectorIdSaIdEE], which doesn’t have
operator>>. Component will not be deserialized.
@ssmenekse I don’t see the ArduPilotPlugin being loaded and it looks like you may have an outdated version of the v-tail model?
/home/sena/gz_ws/src/ardupilot_gazebo/worlds/vtail_runway.sdf
The vtail model and worlds are not part of ardupilot_gazebo. Have you copied them here?
The latest version of the model is here: GitHub - srmainwaring/SITL_Models at prs/pr-mini-talon. You may need to reset your branch to the current version as there will have been force-pushes to the remote.
If you run just the server, the debug output is a little cleaner. I’m expecting to see:
gz sim -v4 -s -r vtail_runway.sdf
[Msg] Gazebo Sim Server v7.6.0
[Msg] Loading SDF world file[/Users/rhys/Code/ros2/humble/ros2-ardupilot/install/ardupilot_sitl_models/share/ardupilot_sitl_models/worlds/vtail_runway.sdf].
[Msg] Serving entity system service on [/entity/system/add]
[Dbg] [Physics.cc:880] Loaded [gz::physics::dartsim::Plugin] from library [/Users/rhys/Code/osrf/gz_garden_ws/install/lib/gz-physics-6/engine-plugins/libgz-physics-dartsim-plugin.dylib]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::Physics] for entity [1]
[Msg] Create service on [/world/runway/create]
[Msg] Remove service on [/world/runway/remove]
[Msg] Pose service on [/world/runway/set_pose]
[Msg] Pose service on [/world/runway/set_pose_vector]
[Msg] Light configuration service on [/world/runway/light_config]
[Msg] Physics service on [/world/runway/set_physics]
[Msg] SphericalCoordinates service on [/world/runway/set_spherical_coordinates]
[Msg] Enable collision service on [/world/runway/enable_collision]
[Msg] Disable collision service on [/world/runway/disable_collision]
[Msg] Material service on [/world/runway/visual_config]
[Msg] Material service on [/world/runway/wheel_slip]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::UserCommands] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::SceneBroadcaster] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::Imu] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::NavSat] for entity [1]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointStatePublisher] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/left_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [2]
[Dbg] [JointPositionController.cc:304] i_gain: [0.01]
[Dbg] [JointPositionController.cc:305] d_gain: [0.0001]
[Dbg] [JointPositionController.cc:306] i_max: [1]
[Dbg] [JointPositionController.cc:307] i_min: [-1]
[Dbg] [JointPositionController.cc:308] cmd_max: [100]
[Dbg] [JointPositionController.cc:309] cmd_min: [-100]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/left_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/right_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [2]
[Dbg] [JointPositionController.cc:304] i_gain: [0.01]
[Dbg] [JointPositionController.cc:305] d_gain: [0.0001]
[Dbg] [JointPositionController.cc:306] i_max: [1]
[Dbg] [JointPositionController.cc:307] i_min: [-1]
[Dbg] [JointPositionController.cc:308] cmd_max: [100]
[Dbg] [JointPositionController.cc:309] cmd_min: [-100]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/right_aileron_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/left_ruddervator_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [2]
[Dbg] [JointPositionController.cc:304] i_gain: [0.01]
[Dbg] [JointPositionController.cc:305] d_gain: [0.0001]
[Dbg] [JointPositionController.cc:306] i_max: [1]
[Dbg] [JointPositionController.cc:307] i_min: [-1]
[Dbg] [JointPositionController.cc:308] cmd_max: [100]
[Dbg] [JointPositionController.cc:309] cmd_min: [-100]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/left_ruddervator_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Msg] JointPositionController subscribing to Double messages on [/right_ruddervator_joint/cmd_pos]
[Dbg] [JointPositionController.cc:302] [JointPositionController] system parameters:
[Dbg] [JointPositionController.cc:303] p_gain: [2]
[Dbg] [JointPositionController.cc:304] i_gain: [0.01]
[Dbg] [JointPositionController.cc:305] d_gain: [0.0001]
[Dbg] [JointPositionController.cc:306] i_max: [1]
[Dbg] [JointPositionController.cc:307] i_min: [-1]
[Dbg] [JointPositionController.cc:308] cmd_max: [100]
[Dbg] [JointPositionController.cc:309] cmd_min: [-100]
[Dbg] [JointPositionController.cc:310] cmd_offset: [0]
[Dbg] [JointPositionController.cc:311] Topic: [/right_ruddervator_joint/cmd_pos]
[Dbg] [JointPositionController.cc:312] initial_position: [0]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::JointPositionController] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Dbg] [SystemManager.cc:74] Loaded system [gz::sim::systems::LiftDrag] for entity [14]
[Msg] [mini_talon_vtail] Advertising on /left_aileron_joint/cmd_pos.
[Msg] [mini_talon_vtail] Advertising on /right_aileron_joint/cmd_pos.
[Msg] [mini_talon_vtail] Advertising on /left_ruddervator_joint/cmd_pos.
[Msg] [mini_talon_vtail] Advertising on /right_ruddervator_joint/cmd_pos.
[Dbg] [SystemManager.cc:74] Loaded system [ArduPilotPlugin] for entity [14]
[Msg] Loaded level [3]
[Msg] Serving world controls on [/world/runway/control], [/world/runway/control/state] and [/world/runway/playback/control]
[Msg] Serving GUI information on [/world/runway/gui/info]
[Msg] World [runway] initialized with [1ms] physics profile.
[Msg] Serving world SDF generation service on [/world/runway/generate_world_sdf]
[Msg] Serving world names on [/gazebo/worlds]
[Msg] Resource path add service on [/gazebo/resource_paths/add].
[Msg] Resource path get service on [/gazebo/resource_paths/get].
[Msg] Resource path resolve service on [/gazebo/resource_paths/resolve].
[Msg] Resource paths published on [/gazebo/resource_paths].
[Msg] Server control service on [/server_control].
[Msg] Found no publishers on /stats, adding root stats topic
[Msg] Found no publishers on /clock, adding root clock topic
[Dbg] [SimulationRunner.cc:503] Creating PostUpdate worker threads: 6
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (0)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (1)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (2)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (3)
[Dbg] [SimulationRunner.cc:514] Creating postupdate worker thread (4)
[Dbg] [JointPositionController.cc:361] Identified joint [left_aileron_joint] as Entity [59]
[Dbg] [JointPositionController.cc:361] Identified joint [right_aileron_joint] as Entity [60]
[Dbg] [JointPositionController.cc:361] Identified joint [left_ruddervator_joint] as Entity [61]
[Dbg] [JointPositionController.cc:361] Identified joint [right_ruddervator_joint] as Entity [62]
[Msg] Found IMU sensor with name [base_link::imu_sensor]
[Dbg] [ArduPilotPlugin.cc:1154] Computed IMU topic to be: world/runway/model/mini_talon_vtail/link/base_link/sensor/imu_sensor/imu
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [fuselage_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_wing_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_wing_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_tail_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_tail_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [main_wheel_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_aileron_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_aileron_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [left_ruddervator_collision] couldn't be created
[Dbg] [SDFFeatures.cc:328] Mesh construction from an SDF has not been implemented yet for dartsim. Use AttachMeshShapeFeature to use mesh shapes.
[Err] [SDFFeatures.cc:843] The geometry element of collision [right_ruddervator_collision] couldn't be created
[Msg] Serving scene information on [/world/runway/scene/info]
[Msg] Serving graph information on [/world/runway/scene/graph]
[Dbg] [ImuSensor.cc:149] IMU data for [mini_talon_vtail::base_link::imu_sensor] advertised on [world/runway/model/mini_talon_vtail/link/base_link/sensor/imu_sensor/imu]
[Msg] Serving full state on [/world/runway/state]
[Msg] Serving full state (async) on [/world/runway/state_async]
[Msg] Publishing scene information on [/world/runway/scene/info]
[Msg] Publishing entity deletions on [/world/runway/scene/deletion]
[Msg] Publishing state changes on [/world/runway/state]
[Msg] Publishing pose messages on [/world/runway/pose/info]
[Msg] Publishing dynamic pose messages on [/world/runway/dynamic_pose/info]
hilalbasibuyuk@ubuntu:~$ gazebo
Error [Converter.cc:151] Unable to convert from SDF version 1.9 to 1.6
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
Warning [parser.cc:759] XML Attribute[degrees] in element[pose] not defined in SDF, ignoring.
this error and when I insert the model ı cannot just appear dots
@HILAL_BASIBUYUK looks like you might be trying to run on Gazebo classic. The simulation only works with the new version of Gazebo (Garden).