Working towards migration to Blheli_32 and DShot protocols which looks good so far, minus any test flight. This is a HEX build and I have motors on AUX ports, BRD_PWM_COUNT - 6
My question, if this setup is successful, I will still need a SERVO channel for Gripper in the near future.
If using 6 AUX ports for motors, am I able to use MAIN output port for SERVO?
If so, I’m trying to get my head around configuring the channel mapping…
If not, I guess I’ll have to move motors back to MAIN output and use OneShot…
I set up my bait dropper on channel 8, configured as passthru, and plugged the servo into port for channel 8. I also have a hex using all pwm ports, and it works great. Just be sure to set up the SERVO options for the right motors, i.e. 9 is motor1, 14 is motor6. There is also a BLH_MASK parameter to set.
I think the latest version can now use the reqular channel outputs, but I’m not sure and don’t have details on how to configure it.
So yes, Servo9 - 14 will be set 33-38 (motors 1 -6)
Servo8_. Would be set 0. As to control via Mission Planner DoSetServo
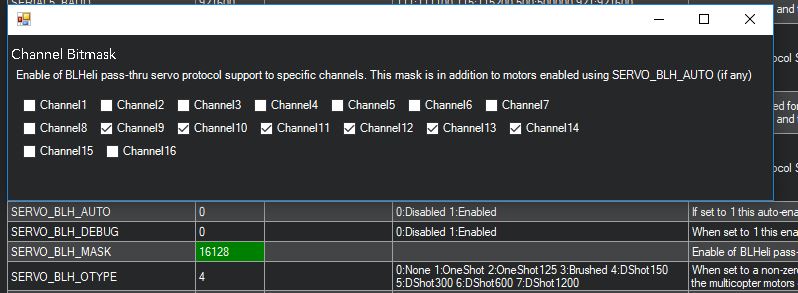
BLH_Mask is a bit tricky for me… 1111 1100 0000. For value of 4032 which says use AUX 1-6 for motors?
Is this correct?
Or after reading the parameter again, 11 1111 0000 0000
Which would be. 16128
Seems I’ve read something about update rate on Main outputs being an issue for servo however that content is older…
My servo just rotates a 3d printed wheel with a slot in it to capture a loop of monofiliment, so update rate is not really a concern, It should be abouyt the same for a claw. A control surface could have a problem if there is one. BLHeli32 so far works fine, but I have not gotten telemetry to work. I have access to an ocilliscope at work to check the signals, I just haven’t done it. And 16128 is correct, I used the wrong value the first time I set it up. QGroundControl has checkboxes that make it easy.