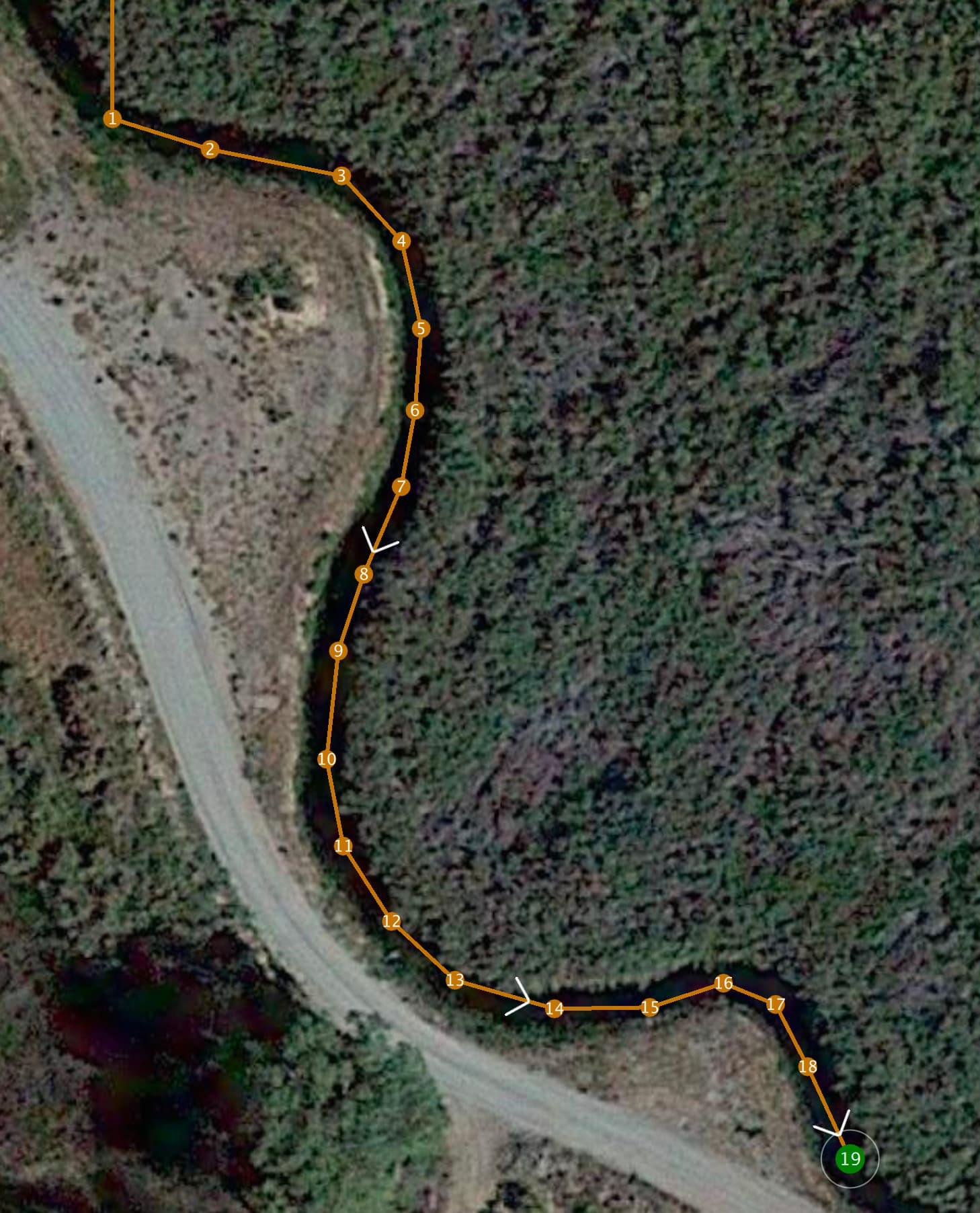
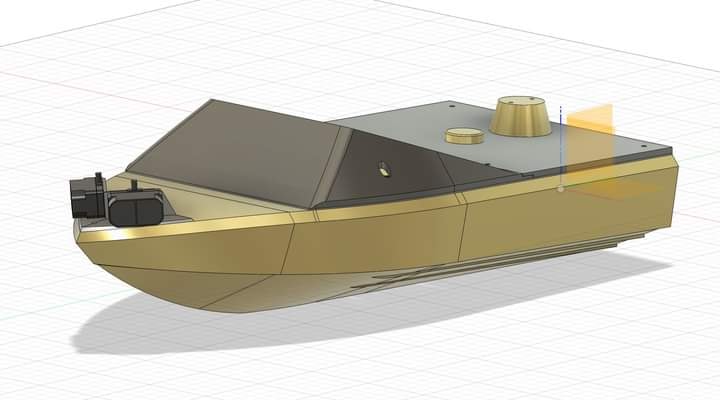
Looking for some tips here. I have an autonomous jet boat I have been working on for way too long. My original intention was to use a simple gps waypoint mission to run a 20-30ft wide river for a few miles. After much tuning it runs way points well and I have been tempted to send it on the river to see how it goes. But there are also many narrower canals in my area with steep banks, almost like tunnels that are 1-2meters wide. I wondered if adding lidar to the boat could make it possible to run these canals at speed and the lidar could account for the gps inaccuracies? I picked up a pair of TFmini plus units and plan to position them 45degrees off forward on the front of the boat. So forward left and forward right. My concern is as I have researched obstacle avoidance in the ardu docs it seems like they are setup for more of a slow moving drone or rover that will stop and look for new directions to make a path around an object. My intention is to have this boat traveling at near full throttle as much as possible. I just want to to use the sensors to help it center itself in the canal and keep it off the banks. Do you think this is possible with the current way obstacle avoidance and lidar sensors are programmed in ardu? Any tips on settings to achieve this goal?