From reading the wiki and searching around it appears that the Leddar-One has been used successfully. The Lidar-Lite V3 may also have been successfully but their is little recent information on it.
The Arduplane wiki cites some problems with the earlier Lidar-Lite V1 and V2 units but there is little info about the V3 variant and whether the problems are resolved. I did find results in one search where Arduplane recommends only using the i2c interface for the Lidar-Lite V3 so that means some folks have been using it recently.
Can anyone recommend a choice between the Leddar-One and the Lidar-Lite V3? Are they currently supported by Arduplane 3.8.5?
Both Lidar are currently supported with ArduPilot.
I am succesfully flying with a Lidar-Lite V3 (Garmin) on a QuadCopter since 2 years with no problems.
Personnaly I prefer using I2C interfaces because it allows multiple devices and leave the UART available for telemetry or other serial communication.
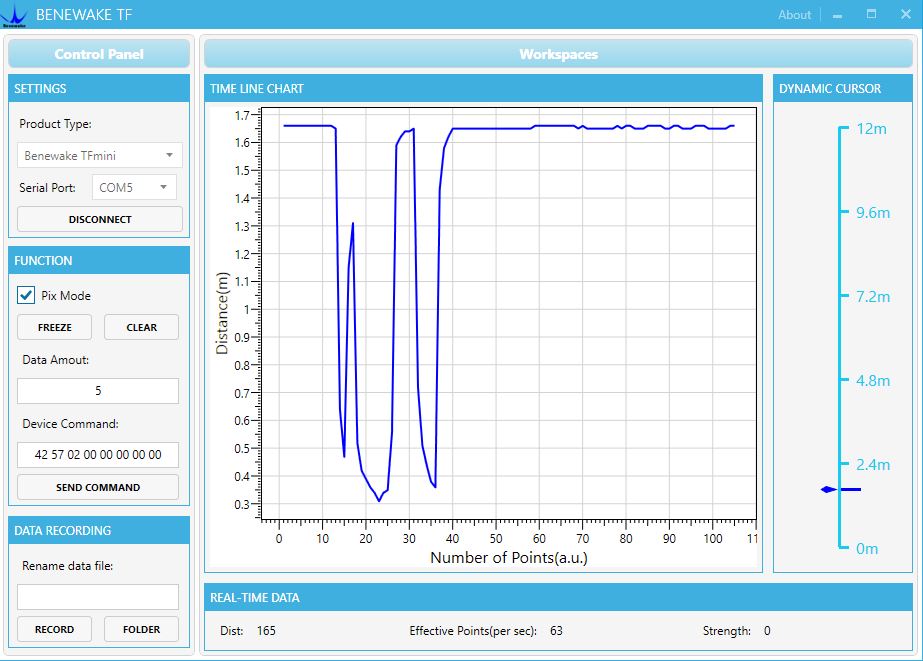
With these settings I get a Mission Planner sonarrange reading of 5.0. I positioned the sensor about 1.6 meters from a flat surface so shouldn’t it show 1.6m?
The value decreases and increases accordingly with changing distances, but is off by this factor - showing 5.0 instead of 1.6.
It’s almost like it is showing feet instead of meters. I tried changing the altitude units from feet to meters in the Mission Planner Configuration Planner screen but it did not change the sonarrange reading.
Interesting update: Took a test flight with the autopilot configured to make measurements with the TFMini but not to use them for autolanding.
While Mission Planner continues to show the distances in feet, the log shows the distances in meters. The green distances track the barometric altitude pretty as seen in this log excerpt during a manual landing. The TFMini cuts out at about 6 meters - just as advertised. This is over grass.
I,ve doing some tests with my new Lidar-Lite v3 on a plane. The specs says that it can read up to 40m but when mounted on the plane and flying it could only read distances no more than 15m.
Is this range OK or I have a faulty lidar? I know that specs (40m) are for optimal surfaces and I´m flying over grass.
Do you think 15m real range is suitable for autolandings or I need more range?
I think 15m is enough for auto landings. I had success with starting the pre-flare stage at 3m and the landing flare at 1.5m. Could have gone slightly higher but my aircraft was slow and lightweight so these parameters worked. I used a TF Mini rangefinder that had a maximum reliable range of about 5m over grass.
It found that it is crucial to get the airplane to slow down to begin the landing phase.