While I agree that L1 period should be as low as possible, I think something else is amiss with this tune, and that very low L1 period value is an offsetting error. The log will reveal that, I’m sure.
1 Like
@Yuri_Rage Yes this could quite possibly be the case - a NAV_L1_PERIOD of 1.5 does seem low. Our vehicles typically ended up in the 3-4 range but this figure is dependant on the intended speed. We see here that WP_SPEED is set at 0.4 which is quite slow with respect to my experience. We typically targeted ~2-3m/s for our vehicles.
1 Like
Your vehicle does not appear to be pivoting as it’s capable of doing. Try moving your second throttle output to SERVO3, which is the recommended setup for a skid steering vehicle.
In the log you provided, the throttle is saturating at about 0.5m/s, but you have 1 m/s set as WP_SPEED. Set WP_SPEED and CRUISE_SPEED to 0.4 or 0.5 and re-tune the throttle. I doubt you need ATC_SPEED_I to equal ATC_SPEED_P (probably 1/2 or less its present value of 0.2).
Similarly, try zeroing ATC_STR_RAT_P and ATC_STR_RAT_I, then increase ATC_STR_RAT_FF to a starting value of 0.4 and tune from there. Your actual steering rate lags quite a bit behind desired, though it appears capable of achieving the desired rate with a more aggressive FF term.
As you dial in the rate controller settings, you may find that the vehicle tends to wander again with NAVL1_PERIOD at 1.5s. Increase it a bit to dampen that behavior as needed.
Today, I’ve run another test directly in the field.
Unfortunately, I didn’t have much time and the weather was cloudy and it was going to rain, so I couldn’t dial with the settings (I’ll do that during next days). I just moved the throttle to SERVO3 and run the calibration again for the radio transmitter and I set the CRUISE_SPEED to 0.5 m/s while WP_SPEED was already at 0.4 m/s.
During next days, I’ll play with the other suggested parameters.
At first, I collected a series a GPS waypoints by using the function “save waypoints” while driving the vehicle along a vineyard to create a very simple path:
- enter the row
- go straight in the vineyard row
- go out the row with the turning maneuver
- go straight again in the next row till the end
This is the waypoints file while this is the BIN file related to the waypoints collection:

Then, I started the mission and, WOW, the vehicle was able to perfectly follow the path even during the steering procedure at the end of the first row!
This is the BIN log related to the mission (I repeated the mission again after 30 minutes).

This is a zoom about the steering:
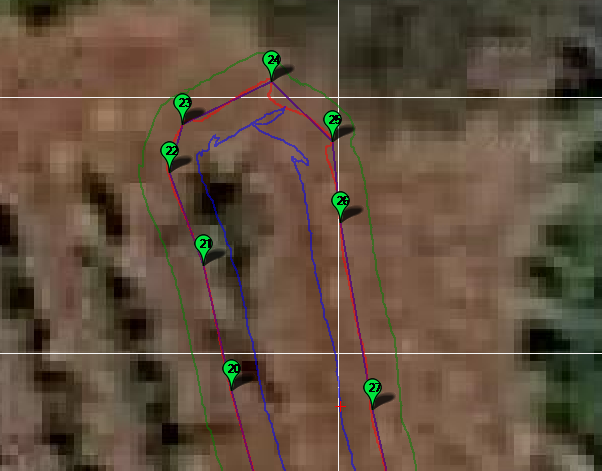
I was really worried about this aspect because the steering is tight, but the vehicle performed great.
Even the straight path looks accurate.
As @Yuri_Rage, @jimovonz and @ktrussell said few posts ago, the path following algorithm on Ardurover works very well.
Even if I haven’t tuned the other parameters, yet, do you guys think that the vehicle is performing fine? Is there still room to improve it? For me, it seems very good, but I’m just a beginner and so I can’t judge it!
Attachments:
- waypoints file: https://drive.google.com/file/d/1JQusjGVTFIDP7Q6mpEQtGaw8PRk74jwT/view?usp=sharing
- BIN file related to the waypoints collection with the radio transmitter: https://drive.google.com/file/d/1kehKsOJLBjuD3UFWNodhDQAkmcx2iRKd/view?usp=sharing
- The BIN file related to mission:
https://drive.google.com/file/d/19lQmmwWNu7B-4xqo0hkY6HNK0hZO9Lme/view?usp=sharing
1 Like
Excellent progress!
I’ll have a look at the log later today.
Can you also upload the waypoint file that you used? I’d like to show you how I would go about editing it.
1 Like
Thank you!
This is the link for the waypoints file: https://drive.google.com/file/d/1JQusjGVTFIDP7Q6mpEQtGaw8PRk74jwT/view?usp=sharing and I modified my previous post by including it, too, for reference.
1 Like
First, your throttle tuning is too aggressive. The speed average is very close to desired, but the controller is very rapidly cycling the throttle output value, which may wear or burn out components.

You can probably set ATC_SPEED_I=0 without detriment - the I term (in blue) is doing very little to improve performance here. You may find that you need a corresponding minor increase in ATC_SPEED_P as a result. Consider reducing MOT_SLEWRATE to something between 50 and 100 if the spikes in speed are not tamed by PID tuning.
Your steering controller is massively underperforming:

Here, we can see that the maximum turn rate achieved is 42.7°/s.
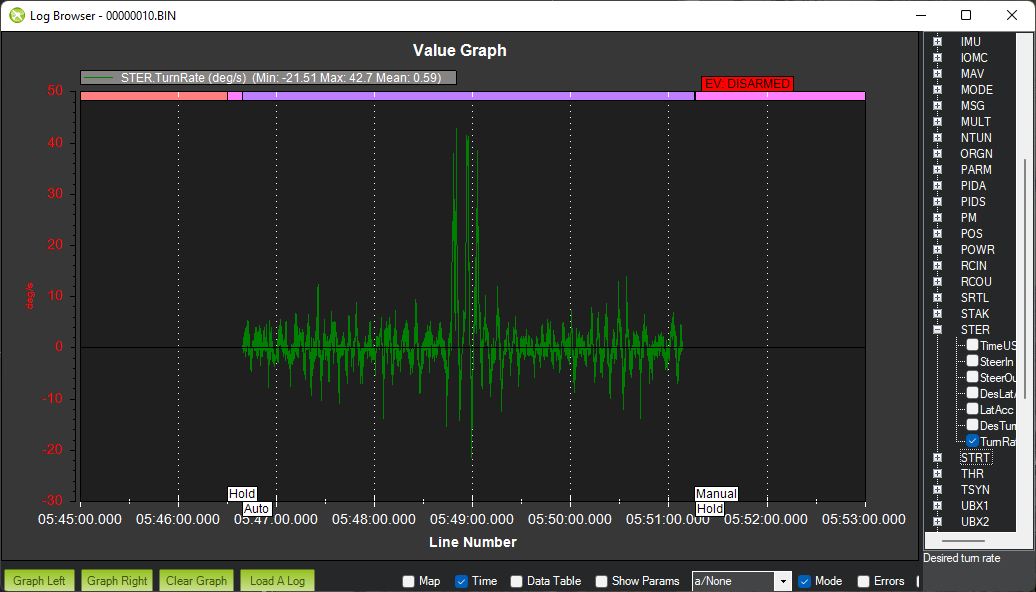
So, ATC_STR_RAT_MAX should probably be about 45 degrees per second, which may help tame the desired turn rate. Then follow the instructions here to tune the rate controller, starting with ATC_STR_RAT_P, I, and D all equal to zero, and focused solely on modifying ATC_STR_RAT_FF, at least at first.
As for your waypoint file, the long legs are only about 50m, and they are spaced hardly 2m apart, meaning that the difference between each waypoint and the straight lines of the polygon that I drew here is hardly a few centimeters.
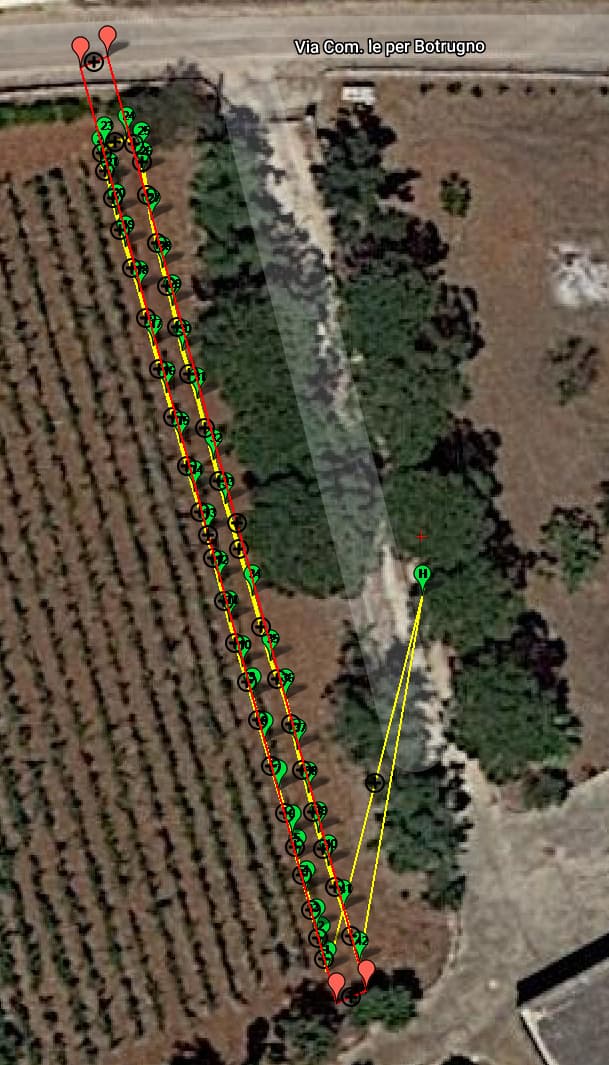
I would edit it to use fewer waypoints and a squared off turn at the end like this, such that we can rely on crosstrack control to maintain the path.

Watch carefully if you choose to use this version of the waypoints file, since I do not have any knowledge of the actual obstacles in your field and simply made some assumptions based on the apparent geometry.
waypoints-yuri.waypoints.txt (514 Bytes - rename without the .txt extension)
1 Like
Thank you, @Yuri_Rage! I will follow all your suggestions and I’ll change the configuration before run the next tests. Moreover, I will change my waypoints file to reflect your tips!
I would like to go deeper all the parameters in order to be able, a day in the future, to inspect the values from the log files and adjust them. For example, I wasn’t aware about the PIDA.Tar, PIDA.Act and PIDA.P,I and D.
Is there a full documentation about all these parameters? I already read everything on ardupilot.org, but I would like to find something more detailed (may be with examples or the math behind it).
1 Like
I am by no means an expert in log analysis and have absorbed most of what I know by reading posts by the development team and those more experienced than me. For example, Randy gives an excellent rundown of his log review in this topic.
If you use Mission Planner for log review, you can hover the mouse over most entries and see a brief description of the value in the lower right corner of the window.
Tridge gives an excellent talk in this video, though he focuses on the Plane platform and uses the more command-line intense MAVExplorer tool for analysis.
There’s also an online tool for log analysis that can be helpful in presenting data in an alternate way.
However, I have not found a single source document that will answer all of your questions, unfortunately.
2 Likes
Thank you, again, the links you gave me are a very good starting point!
I’ve spent last days in reading topics and documents on ardupilot and everything looks so interesting!
1 Like
About the burning out, I checked the temperature by looking at the logs and it was about 45°C.
Is that a normal temperature value or it is too much?
If you’re looking at the IMU temperature of a Cube Orange, that is the default target temperature - they are heated to maintain a high degree of accuracy.
You probably should be less concerned about IMU temperature and more concerned about servo, ESC, and motor temperatures, which are not likely reported in the telemetry data or logs.
Hello, did anyone in this topic try a configuration which uses dual gps, but only the rover connecting to flight controller that it works?