I can perfectly understand, why the feedback from the Ardupilot community was negative. But there is a big but. The guy asked to use the pixhawk as autopilot. But how about…
using Arduplane (+ a GCS) as an Instrument only?
use it strictly only for one of the unregulated aircraft classes (like UL or CFR Part 103 which actually have less regulatory obligations than drones, they e.g. don’t need to be registered and the pilot does not need any license). These aircrafts typically have little to no avionics requirements, their systems neither need to be certified nor to comply with any standard.
There is e.g. this page, https://experimentalavionics.com/ where people are building open source avionics by themselves, which could easily build as reliable, cheap and functional with a pixhawk as data source and a nice adopted GCS.
What do you guys think?
A bit of background
I am the developer of the GCS FlightZoomer (the one which looks like the cockpit of a real aircraft). Two times I was asked, to build a version, which would be suitable as EFIS (Electronic Flight Instrument System) for UL aircraft. My concerns, that were the same as yours in the linked thread, were answered by the reasons mentioned above.
What would the supposed system architecture look like?
Arduplane and the Pixhawk would play the role of a GPS+AHRS sensor box, e.g. like this AHRS module. Or the SP-X modules which are used in combination with a proprietory (and much more expensive!) EFIS system.
As the use case looks pretty compelling from my perspective (and could potentially be a large new opportunity for Ardupilot), I have started to answer one of the requests and am currently building a EFIS, which is fed with data from a Pixhawk.
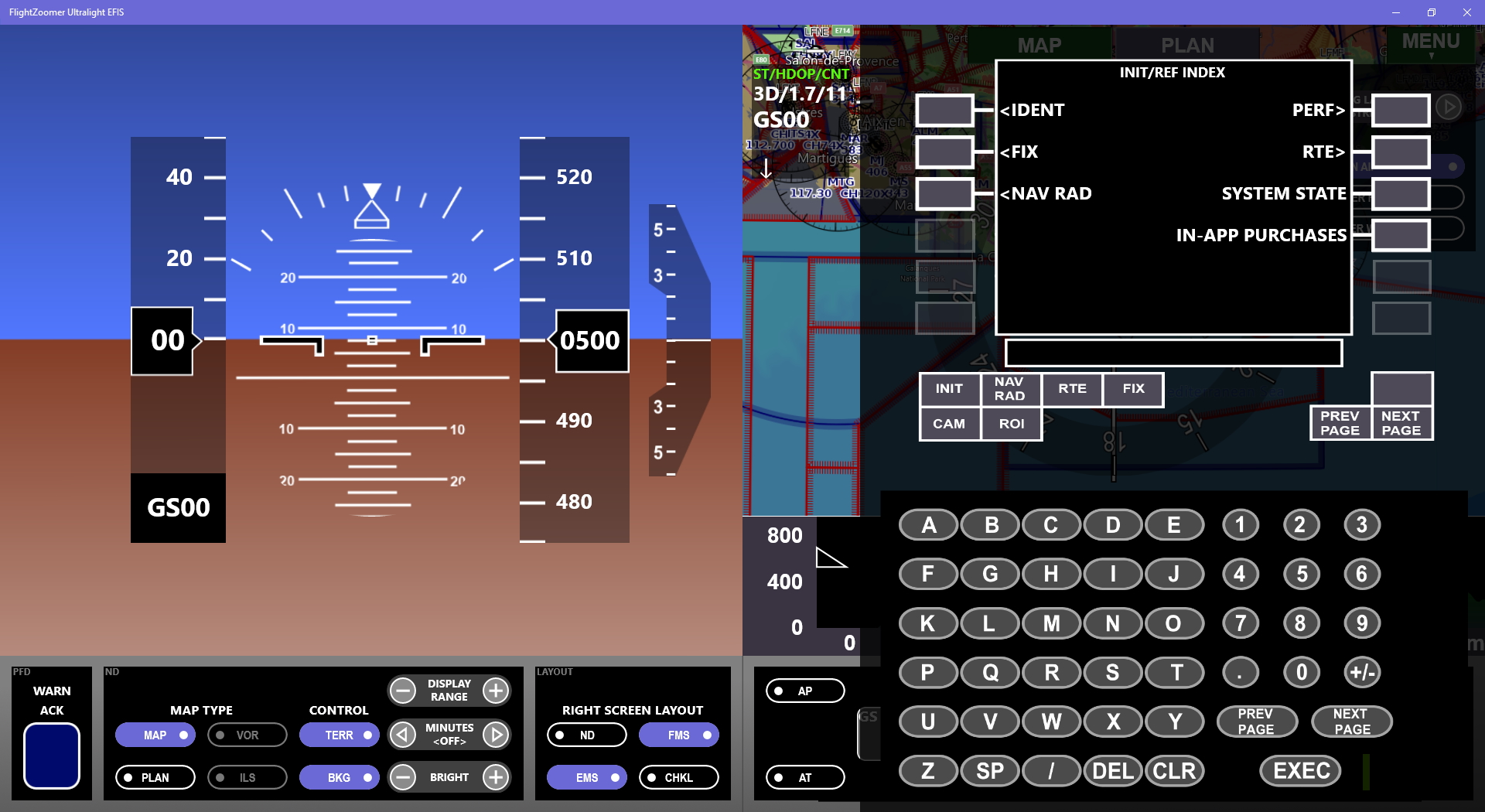
To give an impression of the EFIS, here are two screenshots:
Hi,
In my EFIS, the Pixhawk will only serve as an excellent AHRS (providing sensor fusion and value conditioning). Compared to other EFIS systems for experimental aircraft, FlightZoomer EFIS will be very cost efficient.
Much cheaper than specialized EFIS + AHRS + EMS devices on one hand and much better than App-only based systems on the other hand.
The latest build from today looks like this:
The FlightZoomer EFIS will have:
Standalone simulation capabilities (used to make above screenshots)
Flight altitude based coloring of terrain
3D PFD Display, also with colored terrain
Extensive support for 3rd party VFR maps
Can be operated with alternatively with a mouse, a trackball(-mouse), a touchscreen or by a special 12-key-operating model, which makes use of 12 physical buttons, which are allocated below the screen in a row.
Hi Daniel,
the system is in development and a prototype by my beta tester (see the facebook post above) is in testing phase. His aircraft is not yet finished. But he has built an i/o board meanwhile to connect all the engine sensors, which will provide EMS-like engine information on the right side of the screen:
Besides that, some of the newer development is shown in these videos:
Control the entire GUI, including system startup+shutdown with a row of 12 buttons below the screen:
A very innovative (Flight Director-like) pilot guidance system, that provides the information to the pilot how to manually fly in order to follow a particluar flight path (this is not ArduPilot based and it is not an autopilot, like a Flight Director in a jet airliner it just provides hints to the pilot):
Congratulations on your dedication to this project. Your EFIS panel has turned out to be highly functional. I’m eager to hear about any updates on this project and would like to know if you have developed anything for Android. Additionally, I’m interested in finding out if your EFIS panel can be integrated into an ONAV project connected to a Pixhawk.
In other words, I’m interested in using your FlightZoomer instead of Mission Planner.