We are having some issues with tuning / parameters on a fixed-wing VTOL drone here in West Africa, and we need someone to help us with them! The drone is losing altitude and having pitch/altitude oscillations in fixed-wing flight modes. The drone we are using is a 3.2m wingspan fixed-wing VTOL quadplane with a Cube Orange autopilot and ArduPlane 4.1.1 firmware. Here are the logs of the details of the problem: Logs for Yangda.zip - Google Drive
Contact me directly here if you are interested in this opportunity and can help solve this problem:
WhatsApp: +44 7930 726161
Email: jkryca@ardaimpact.com
there is just no correlation at all. The only reason your aircraft can fly is the VTOL motors keep saving it.
I see you are using a VTail setup. Please carefully check the VTail functionality using this setup guide: https://ardupilot.org/plane/docs/guide-vtail-plane.html
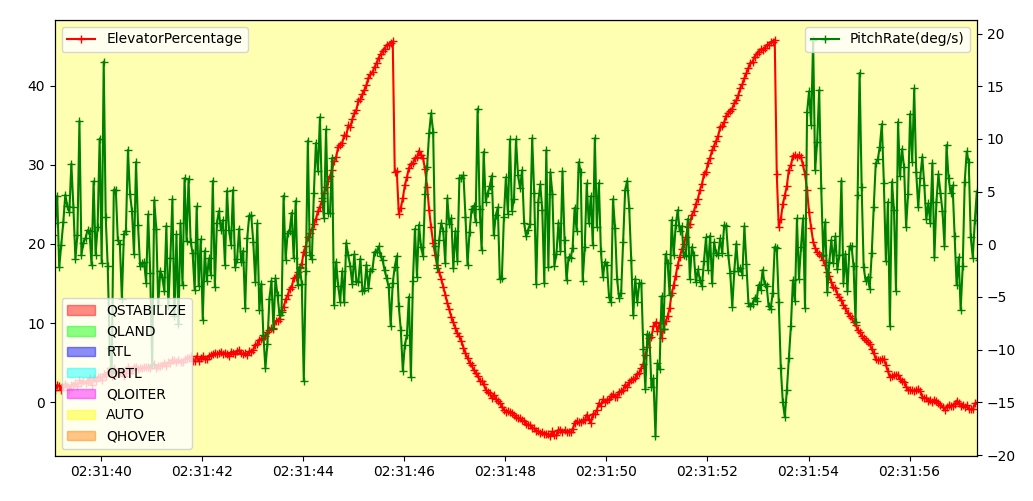
This was the attitude control in your log:
your ailerons are somewhat effective (not great, but at least functional). Your elevators are not functional. The VTOL motors keep bringing the aircraft back to level
Thank you for the in depth response - we appreciate it a lot.
I will start off by saying the following - we are not the manufacturer of this drone. We ordered it directly from the manufacturer in a RTF (“Ready To Fly”) configuration, after which we flew it in Poland as part of our flight testing ahead of a project, and then shipped the drone to West Africa where we have now started using it ahead of that project. We did not modify any parameters (apart from some operational things like Q_ASSIST_ALT and failsafe timeouts) between shipping it from Poland and using it in West Africa, as it was flying great in Poland.
In this .BIN file you can see one of those flights in Poland, before we shipped it out. As you can see, both VTOL and fixed-wing behaviour is great, including AUTO, RTL and QRTL modes. Same drone, same ArduPilot version, same PIDs, same elevator. 2023-02-22 09-26-46.bin - Google Drive
In your response, you noted things like using an old ardupilot version, zero FF in pitch PID control and a non-functional elevator. I can see where these points are coming from, but the first test flights here in Africa were immediately having the issues I described in this thread despite the drone having flown great on the same parameters just a few weeks earlier in Poland before it was shipped here! (With regard to GPS 1 failing. In this log you can see a flight here in Africa with that resolved - same problem happens: 2023-05-26 14-09-15.bin - Google Drive )
Is it possible that the change of environment had this big of an impact on the drone’s flight characteristics? (Poland in late February vs Gambia in May).
Secondly, we have another unit of this drone model which we ordered from the same manufacturer. As you will see, it is also flying fine, despite having similar PIDs and being the same airframe/electronics (however this one has ArduPlane v4.3.5). I’m attaching a link to a flight video and logs of that drone here: 20230524-FW320定点抛投.mp4 - Google Drive and 00000019.BIN - Google Drive .
What are your thoughts now given this information? And what can we do to address this problem - fly an autotune in FBWA ? do an in flight airspeed sensor auto calibration? My team would appreciate your help directly with this - would be great if you could please contact me directly @tridge (jan.kryca@gmail.com or +44 7930 726161 on WhatsApp).