I am performing an upgrade to my Tarot 650 Sport quadcopter, and I have a couple of questions seeking advice. But before I do I feel that I must first recap the history of this build in order to give you some background. After a couple of years away from the hobby (my previous Tarot multirotor crashed when a propeller blade separated in flight), I decided to try once again to build a large multirotor; I wanted a stabilized video platform.
Toward this end I chose to build a Tarot 650 Sport powered by T-Motor MN5008 400KV motors driving Tarot 17” foldable carbon propellers and combined with T-Motor Air 40 A ESCs. As it turned out, the arms were too short to accommodate the large propellers and so I had to replace them with arms that were about 1½” longer. This was just the beginning of the problems I had to overcome. I also chose an APM flight controller. I know, I got lots of gas from the community over my decision.
Once completed, the aircraft suffered a devastating crash when due to stability issues, I switched flight modes from Stabilize to Land and the motors disarmed in flight. After I completed repairs, subsequent flights revealed undesirable motor performance – they were not running smoothly in a synchronized manner. Some of you may have seen my short video click here. Troubleshooting eliminated the motors, ESCs, and wiring. All that seemed left was the F.C., so I decided to acquiesce to the Ardupilot community and replace it with a more current controller.
After some searching, I decided on a Holybro Pixhawk 6C controller with a M9N GPS/compass and a new power module. This choice will also allow me to use the current version of Mission Planner and firmware and all of this should make the Ardupilot community happy. Replacing the power module requires me to disassemble the aircraft in order to get to the bottom center plate where the power distribution and ESC components are located. I chose to install the ESCs within the body in order to keep the power leads and ESC control wires short and have the three power wires for each motor going through the arms – I wanted to avoid using capacitors to minimize unwanted inductive effects with long power wires.
Anyway, everything that I think I need has arrived from China (ahead of Trump’s tariffs), and I have begun the work. This will provide me an opportunity to revisit my location, placement and handling of components and wires in order to eliminate any possible bad emf interference. Now comes my first question: Should I twist the three wires going from the ESCs through the arms and to the motors, or leave them straight – or does it even matter? I had not originally planned to twist them, so if I must, I will need to replace them as they won’t be long enough if I twist them. Second related question: What about the control lines from the ESCs to the Pixhawk – should they be twisted or kept straight, or does it matter? Are there any other wiring considerations I should make? I would appreciate your thoughts and will keep you abreast of my progress and results.
I didnt with the last couple of similar builds I did and it works OK - a similar size to your but QuadX8 instead (2 motors on each arm)
If they are short it will be OK, long would be more than 10 centimeters. You could twist them anyway since servo signal wire is cheap and easy.
If you were able to it would have been nice to replace those ESCs with a 4in1, which simplifies a lot of wiring and saves weight and space.
You could use DSHOT which would give you all the ESC data and the signals are much more noise-immune. I’ve personally used a Holybro Tekko32 65A metal with a quad under high load, no issues long term. I’ve got 2 of the 45A model in the QuadX8, no issues.
I’m not sure what happened in that case, but if you armed in Stabilise mode you can get a disarm in flight if the throttle is at minimum for long enough in Stabilise mode.
Except for acro work, it’s best to have a spring-centered throttle for multirotors - then you can put the transmitter down, look around, hand it to someone, all safe in the knowledge the copter should be hovering instead of doing its house brick impression.
If you do have a spring-centred throttle set: PILOT_THR_BHV,7
Well, I don’t remember the exact sequence other than I was relative low and hovering. I Can attribute it to pilot error - right now my focus is completing the upgrade and hopefully ending up with a more stable aircraft.
Thanks for the advice and pic! But I think I’m going to stick with what I have. The ESC control lines came twisted so I will leave them that way. But I’m seriously considering replacing the lines from the ESCs to the motors so I can twist them which will require longer lengths. I’m highly funds restricted at this time so I must use the T-Motor Air 40A ESCs I have.
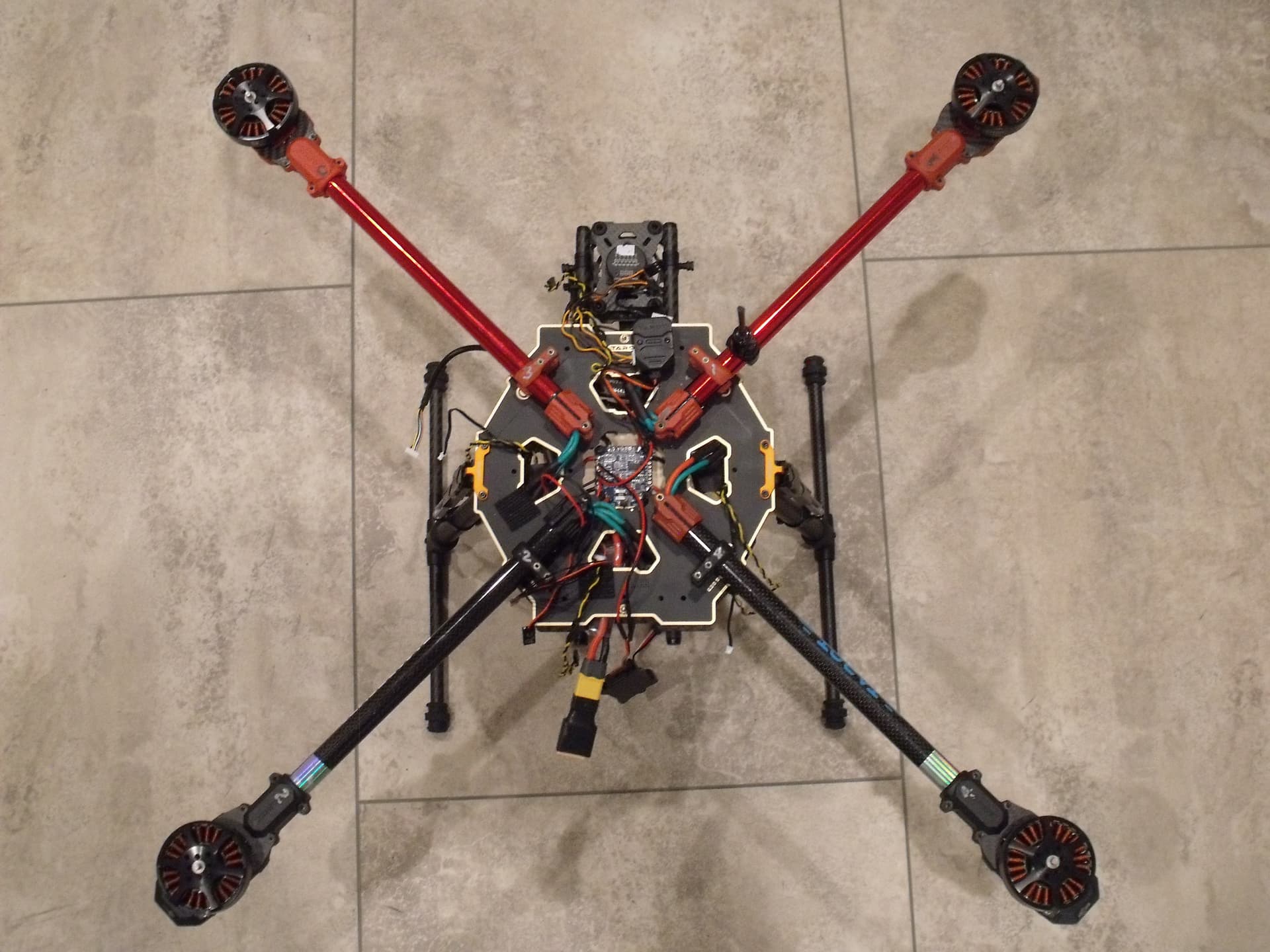
The frame is a Tarot 650 Sport. I had to modify it a bit - lengthen the arms by about 1 1/2" in order to accommodate the 17" propellers, and I added a thrid center plate in order to install the ESCs in the body.
Status report: I have successfully replaced the Power Module for the Holybro flight controller and I reconnected the motors to the ESCs and verifed that they are connected correctly by spinning each one individually. I also decided to twist the ESC/Motor lines by loosening the motor mounts and rotating each motor until the slack was taken up. Next, I need to apply lock-tite to the screws that secure the middle plate and re-level the motors.
It’s one of these, we’ve had a couple of them and they are strong, but like almost all frames there are modifications you’ll need to do to suit your own components.
I am now at the point where I need to install Mission Planner so that I can flash firmware and begin configuring my Pixhawk. I just downloaded M.P. version 1.3.79.1 build 1.3.8378.29199 - I hope that this is is a compatible version.
I followed your link to a github page - I’m not familiar with github. Can you point me to a reference that can guide me how to download/install the s/w?
So, I fumbled my way around - managed to download a zipped folder called “MethodicConfigurator-latest” and unzipped, opened it up, found an install_windows file and ran it. A window popped up warming about some incompatible Python package and asked if it was okay to uninstall; I responded with “Y” (Yes) and it disappeared - nothing seemed to happen.
Yes, I saw that and it’s not working like the pictures show. I’m running on a laptop with Windows 11 Home. I wonder if the install instructions were for an earlier version?