for context I’m writing a program in LUA script to monitor the distance read from a forward facing range finder on a copter-plane.
I am writing my code in LUA script
I am using mission planner for the GUI
I am using the pixhawk cube
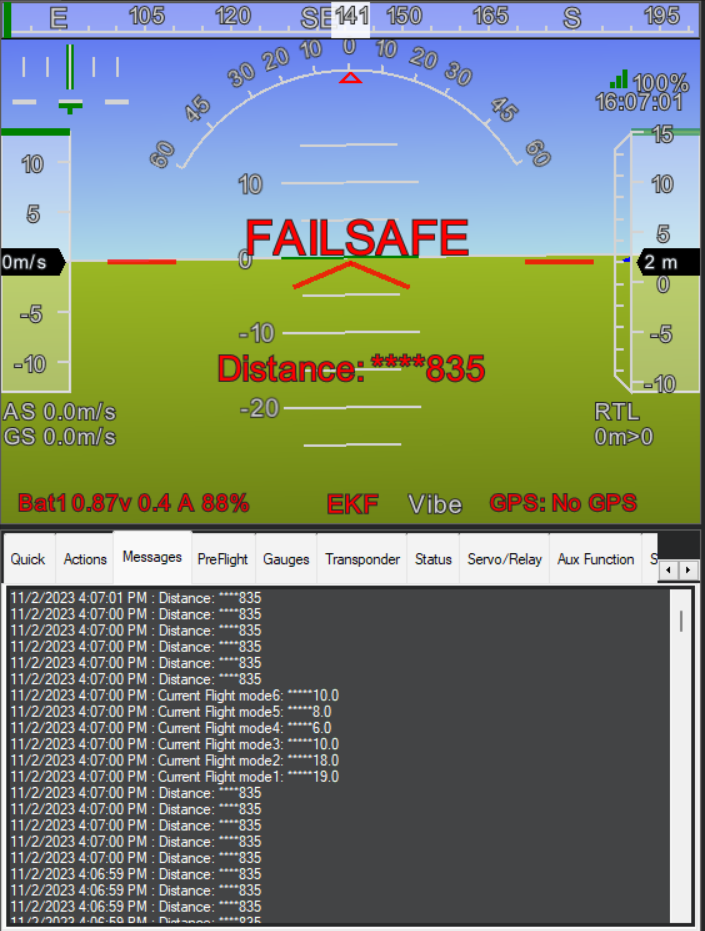
The objective is that if the range finder detects a distance less than some minimum safe distance it will change from auto flight mode to Qloiter flight mode, (from what I’ve been told this will basically stop the plane). I wrote a quick script to do this and to read the changing flight modes. In the first image below you can see the flight mode values for all 6 flight modes as well as the range finder value (835). In the second image you can see that the distance it’s reading has passed the designated threshold, that being 100cm, and it’s set all the flight mode values to 19, which is QLoiter. But you can also see in that same image that the flight mode that the GUI is displaying is still reading RTL not Qloiter, even though all flight modes have been set to Qloiter.

It should be noted that the GUI does change when I toggle the flight mode switchs on my radio controller. See below image

In this image we can see that the GUI is now accuratly reflecting the flight mode values for the flight modes.
My objective would be to force the GUI to update based on the newly updated parameters, so when I set a parameter in LUA I would like that to be reflected in the mission planner GUI.
My concern is that it not indicating in the GUI may imply that the system responsible for governing the flight mode in the pixhawk cube that I’m using is not recognizing the parameter change unless there’s some force update signal that I need to provide.
Code I’ve written
This code performs a sensor check and changes the flight mode parameters accordingly
local address = 102
local com = 0x00
local safeAlt = 100
local i2c_bus = i2c:get_device(0,0)
i2c_bus:set_retries(10)
function update()
i2c_bus:set_address(address)
returnTable = i2c_bus:read_registers(0, 2)
distance = returnTable[1]*256 + returnTable[2]
gcs:send_text(0, "Distance: ****" .. distance)
if(distance < 100) then
param:set('FLTMODE1', 19)
param:set('FLTMODE2', 19)
param:set('FLTMODE3', 19)
param:set('FLTMODE4', 19)
param:set('FLTMODE5', 19)
param:set('FLTMODE6', 19)
else
param:set('FLTMODE1', 19)
param:set('FLTMODE2', 18)
param:set('FLTMODE3', 10)
param:set('FLTMODE4', 6)
param:set('FLTMODE5', 8)
param:set('FLTMODE6', 10)
end
return update, 100
end
return update()
This code just printed the flight mode values to the console
function update() -- this is the loop which periodically runs
gcs:send_text(0, "Current Flight mode1: *****" .. param:get('FLTMODE1'))
gcs:send_text(0, "Current Flight mode2: *****" .. param:get('FLTMODE2'))
gcs:send_text(0, "Current Flight mode3: *****" .. param:get('FLTMODE3'))
gcs:send_text(0, "Current Flight mode4: *****" .. param:get('FLTMODE4'))
gcs:send_text(0, "Current Flight mode5: *****" .. param:get('FLTMODE5'))
gcs:send_text(0, "Current Flight mode6: *****" .. param:get('FLTMODE6'))
return update, 1000
end
return update()
Thank you for any answers.