Here is the build Info and image of the copter (Post)
So the mission only has 3 simple things to follow:
Takeoff at 100m Altitude
Go to a Waypoint at some distance (100m Altitude)
Go to another waypoint and Land
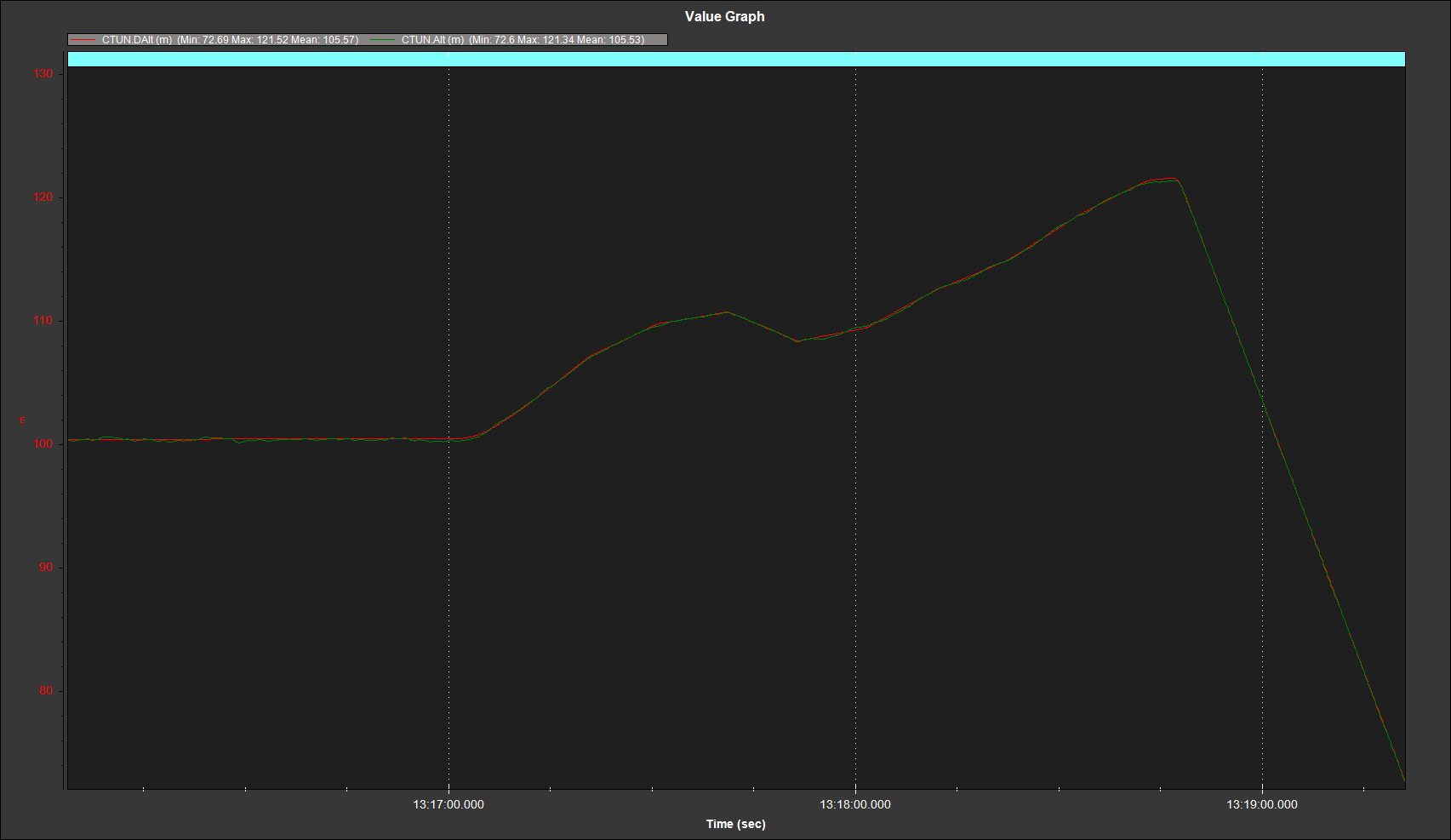
So while going to the LAND waypoint the copter climbed 21m in altitude
Now I am confused since the desired altitude also went up. (Log attached at the bottom of the post)
In the short-term if you replace the Land command with two commands - a waypoint to the desired lat,lon and then a Land without the Lat,Lon specified it should work OK.