Hello all,
When I tested the deep stall landing on SITL, I realized that ‘plane-elevon’ and ‘plane-vtail’ frames fail to conduct the deep stall landing.
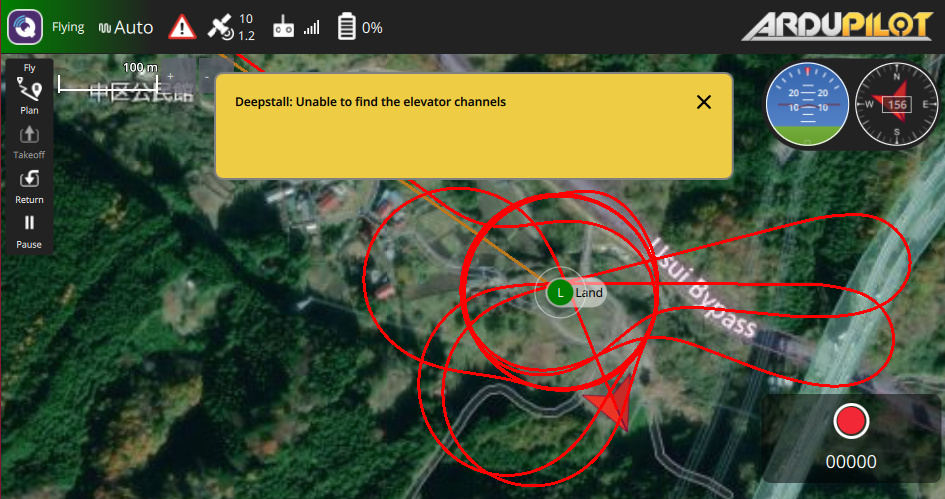
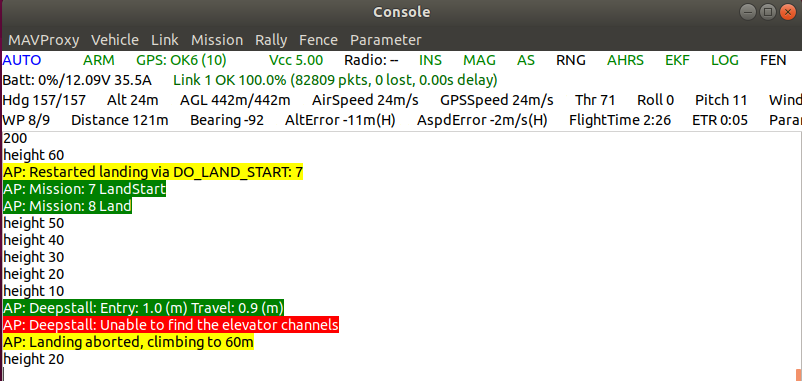
Does ArduPilot support the deep stall landing for the two frames?
You can reproduce the issue as following steps:
- ./Tools/autotest/sim_vehicle.py -v ArduPlane -f plane-elevon --speedup=4 --console -L Karuizawa -w
- param set EK2_ALT_SOURCE 2
param set EK3_SRC1_POSZ 3
param set TERRAIN_FOLLOW 10
param set TERRAIN_ENABLE 1
param set LAND_TYPE 1 - Load and run this mission
Plus, some of frames shows unstable roll and pitch control, or even cannot take off. This issue might be related to this topic.
- quadplane-cl84: cannot takeoff / plane V4.0.3 works well.
- firefly: cannot takeoff
- plane-jet: still unstable roll and pitch
- plane-tailsitter: cannot takeoff
- quadplane-tilttri: still roll and pitch oscillations
- quadplane-tilttrivec: still roll and pitch oscillations
Test version: ArduPlane V4.1.0beta7
Log: https://drive.google.com/drive/folders/1dRmTtCsoGR4N6OdRgKrJlc-888sywnB8?usp=sharing