2021-09-11 21-15-12.bin (452 KB) Hello!
I am using a Radiolink pixhwak in a tricopter.
It worked fine, but I upgraded motors and ESC.
It is now unstable and cannot be flown.
Attached are the logs I just downloaded after unsuccessful flights.
I don’t know how to review them other than the data flash auto analyses tool.
I suspect there is a big interference coming from the ESC’s.
Thank you for all your helo!
Andre
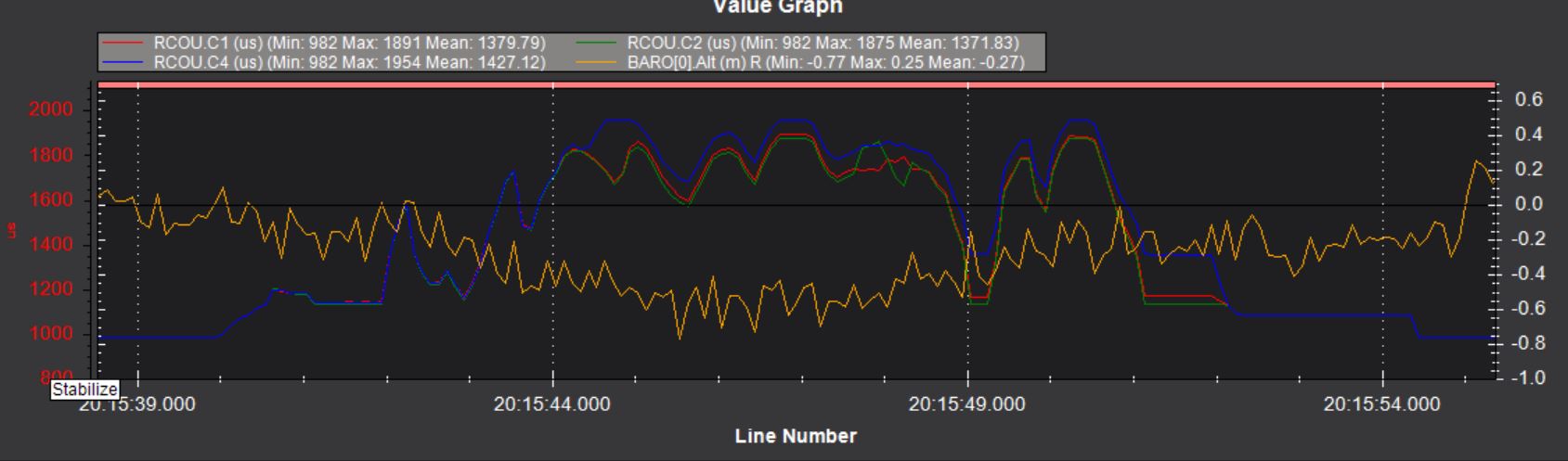
The motors are commanded to close to max and it’s not going anywhere. Looks like lack of thrust to me.
I tested motors and they work fine on the bench.
I sent just one log. The second one is attached.
The tricopter lifts up fine, but it starts wobbling a lot. I was lucky to land it safely!
From these two logs, one I flew with the copter, and other I did not lift up.
Thank you!
2021-09-12 15-31-31.bin (408.6 KB)
Well, everything looks to be at default. At least set the Initial Tuning Parameters. Connect to Mission Planner and use the Alt>A Tuning plug-in and make the changes as suggested.
Looking at the vibrations loitor seems to be stronger than Stabilize flight mode.
Thanks!
Will check it out and let you know.
Yes you are correct. This is why I suspect some kind of interference, but I don’t know how to identify it!