I’m working on a novel config where a servo motor is used to gimbal the entire centerbody of my quad relative to the rotor frame. The idea is to keep the centerbody (which is streamlined) parallel to the flow at all flight speeds for optimal aerodynamics. The rotor frame is mechanically attached to the centerbody via ball bearings and a servo linkage. A photo of this config is shown here: Ardupilot Forum Pics - Google Slides
Note that the servo motor can be programmed to adjust output power, neutral position, travel and damping. I tried maxing out the damping factor, but this didn’t fix the issue. Any thoughts on what could be done here to resolve this issue would be much appreciated.
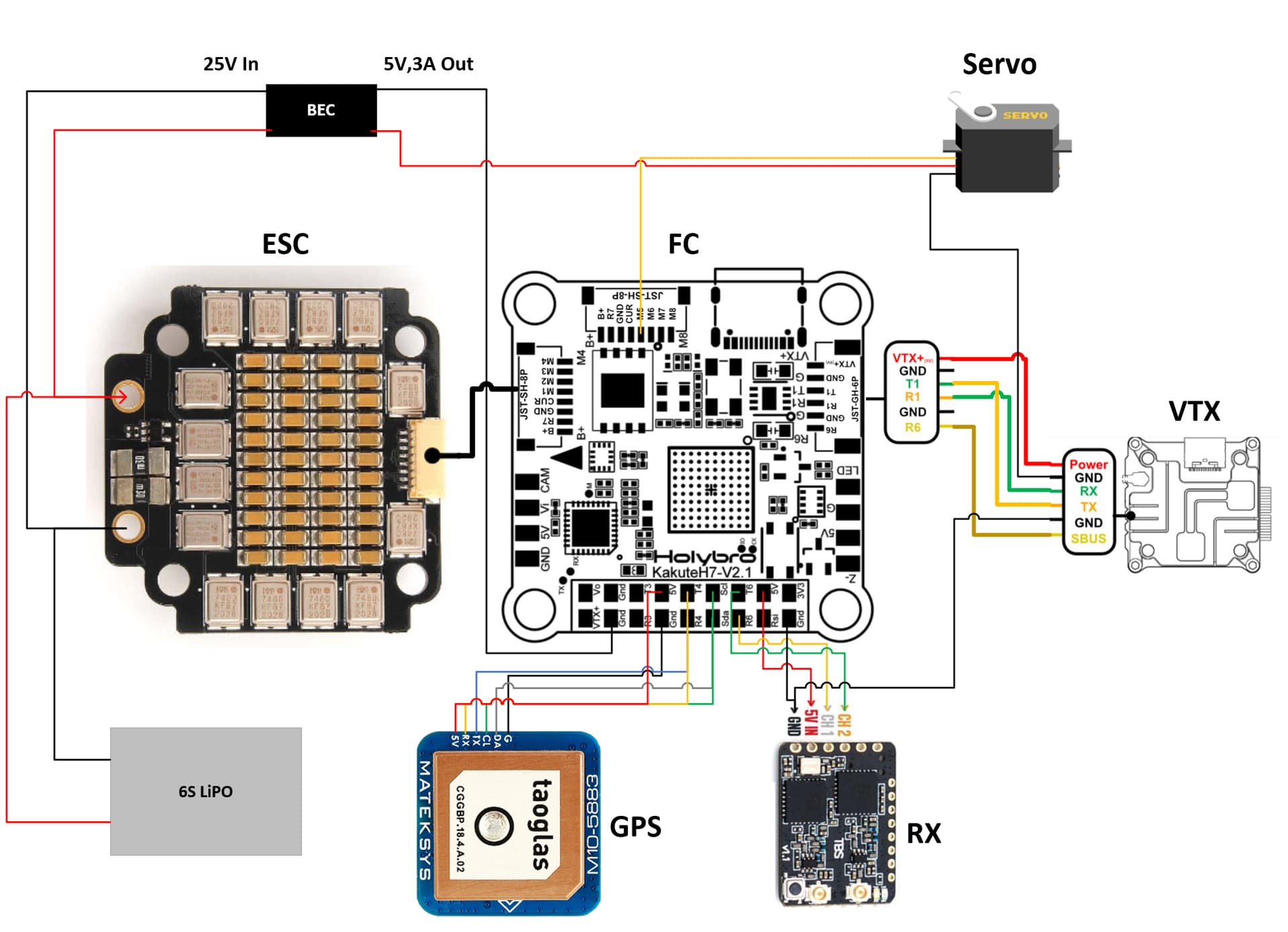
The servo is powered by a 25V to 7V UBEC that taps off from the battery at the ESC and it’s pwm pin is connected to the M5 port of the flight controller:
the gimbal outout does not have PID control its just setting the servo position relative to the frame so im not surprised you get oscillations when you do that as your essentially getting out of phase with the servo due to the delay between detected rotation and the servo moving.
im not sure, I dont know if you will get a servo to operate fast enough to make it as smooth and as fast as you want. you might need something like a gimbal motor with a reduction gear.
Which one’s are you looking at? Original servo was selected based on a combination of weight, torque and speed - but looks like I may need something faster .
What if the servo was under PID control with a flight stabilizer module on the frame? I had a tiny one of those on a small wing before we had tiny Ardupilot flight controllers.
I was thinking of one of the flight stabilizers used for heli’s and planes that have gyro’s and accels but actually these are not PID controllers. The one I had did have adjustable gain but that’s pretty simplistic. I wonder what you could do with one of the small 20x20 Ardupilot supported boards. All you are doing is pitch leveling right?
I’m not sure either actually. I think @geofrancis observation about needing PID control is right but honestly not sure how to implement it. Just spitballing but the FC running Plane with the servo on an elevator output…