Interesting. Wonder if just swapping to a faster servo (without PID control) would be enough. Going to try it with one of the savox servos.
I see how that might work. Seems like you would need a way to make sure that elevator deflection is 1-to-1 with aircraft pitch to get the right movement.
Maybe FBWA mode would work to simply keep the frame level.
may be up SERVO_RATE from 50 to 333?
Just tried that but not seeing any improvement
That won’t make any difference. It’s the response time of the servo.
I think he is talking about for the replacement servo as it runs up to 333hz. it will need set to that to get the claimed response times.
1 Like
Will give it a try when the new servo arrives tommorrow
make sure you have a beefy power supply for that servo, it can pull 8 amps at 6v.
I ended up going with this one since I don’t need the higher torque capability so should be good with the current power supply (4.7A max). MINI DIGITAL HIGH VOLTAGE SERVO 0.055/167@ 7.4V ALUMINUM – Savox USA
I’ve added an additional FC on the centerbody running Arduplane on FBWA. I’ve configured the servo on the elevator output and verified its motion in the correct direction when tilting the rotor frame (still running old servo,as the new one hasn’t arrived yet). I’ve done an accel calibration and level and set FBWA as the default mode. With the default pitch PIDs I’m seeing large pitch error (centerbody not level when rotor frame is pitched) and oscillations, so will definitely need some tuning there.
Other than manually adjusting the gains by trial and error, do you or @geofrancis have any ideas on the best way to approach tuning?
i think you will need to tune it differently since your trying to use a rate controller as an auto leveler. essentially you want it just to auto level with just the smallest amount of stabilisation.
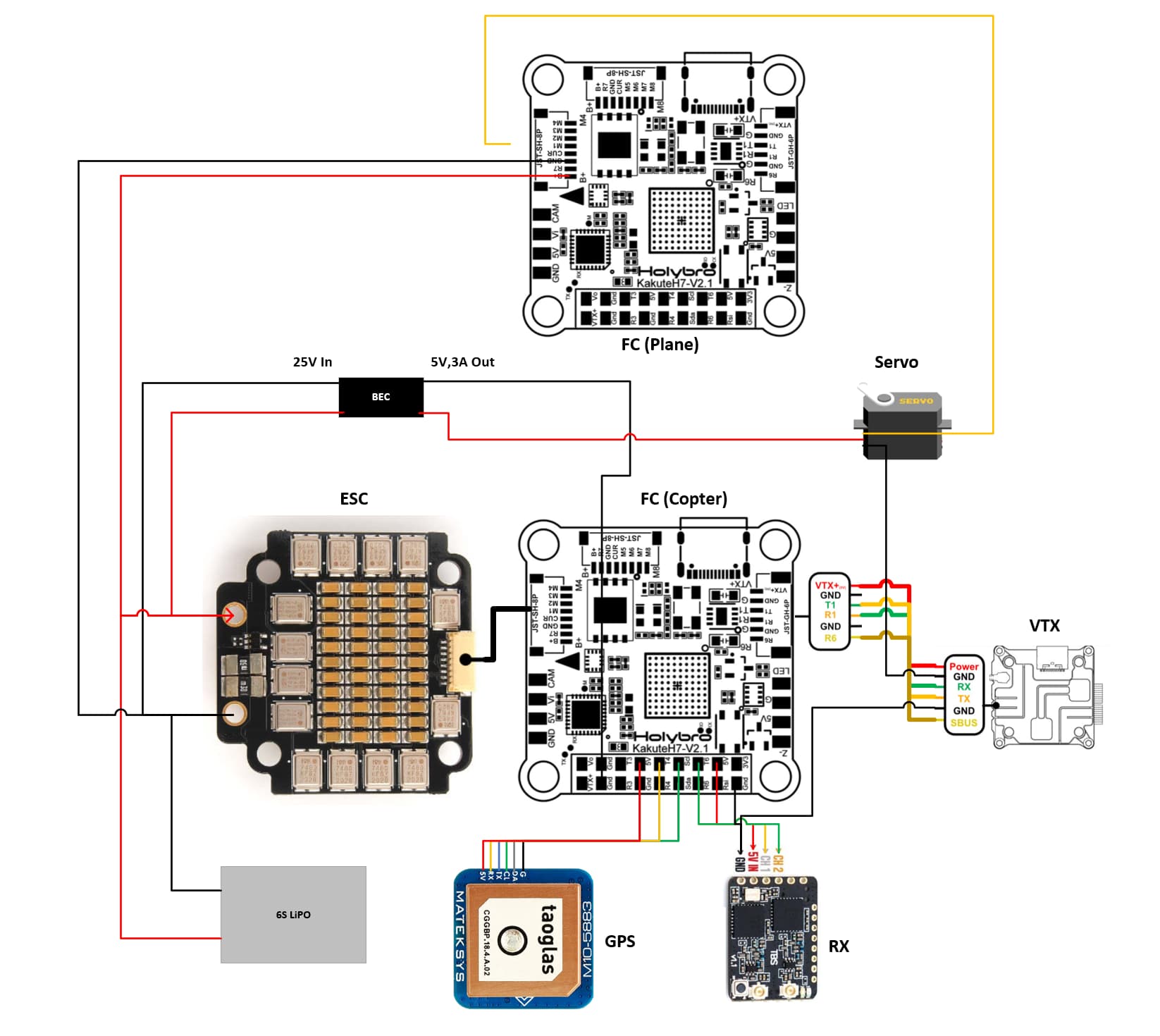
@dkemxr and @geofrancis I currently set the SERVO2_MIN/MAX limits to the signal range of the servo (500 to 2500 us) and LIM_PITCH_MAX/MIX set to +/-9000 but the centerbody is not leveling correctly when the rotor frame is tilted. Right now I only have power and the servo connected to the plane FC as shown below. Would I also need to connect the Rx to the plane FC (teed from copter FC) and do a radio cal of the pitch stick to set the servo min/max limits?
@geofrancis probably has a better handle on this than I do with Plane stuff but maybe use a pot or slider on your Tx for Frame pitch input. Then you can adjust it.
Quite the unique configuration!
1 Like
I dont think that will work, its been a couple of years since i done anything with a plane, but I think the issue will be that the elevator is trying to control the pitch rate and not its pitch position, I belive since your essentially mechanically coupled to the air that you need to treat it like its got masive control surfaces turn the pid right down and turn the auto leveling up, even then im not sure it will work with ardupilot as its mixers are quite sophisticated compared to something like inav.
1 Like
I’ll give it a try. What are the specific parameters that control auto leveling? Do you recommend just setting these by trial and error (tilting the rotor frame by hand, looking at pitch error and updating in small increments). Aerodynamic forces in flight will also impact tuning, but I need a flyable config first that auto levels correctly.
I cant remember its been years since i looked at a plane, I think something like inav will work better as its much simpler. if your using ardupilot try with stabilised mode rather than FBWA as FBWA takes a lot more than angle into account for pitch control.
1 Like
Got it - i’ll look into it. So keep the copter part on ardupilot and run plane on inav is what you suggest?
yes but try it with stabilised mode first to see if it works better than FBWA. stabilised should behave like inav as its a simple auto leveling mode it doesnt take into account angle of attack or airspeed.
1 Like