Hello,
This is Bharath. We are working with Pixhawk 2.1 from 2 months and faced an issue
Drone specifications:
- Tarot Frame 960mm
2)T motors 280kv
3)T motor esc 60A
4)T motor 22 inch propeller
5)Tattu battery 6S 22000mah
6)Horus x 10s transmitter
7)Rededge-m camera as payload
We faced an issue in autonomous mode survey grid yesterday. We had 5 flights with different auto missions with 2 separate batteries with changing the velocities from 5m/s,6m/s.7m/s. We had a stable flight for first 4 flights
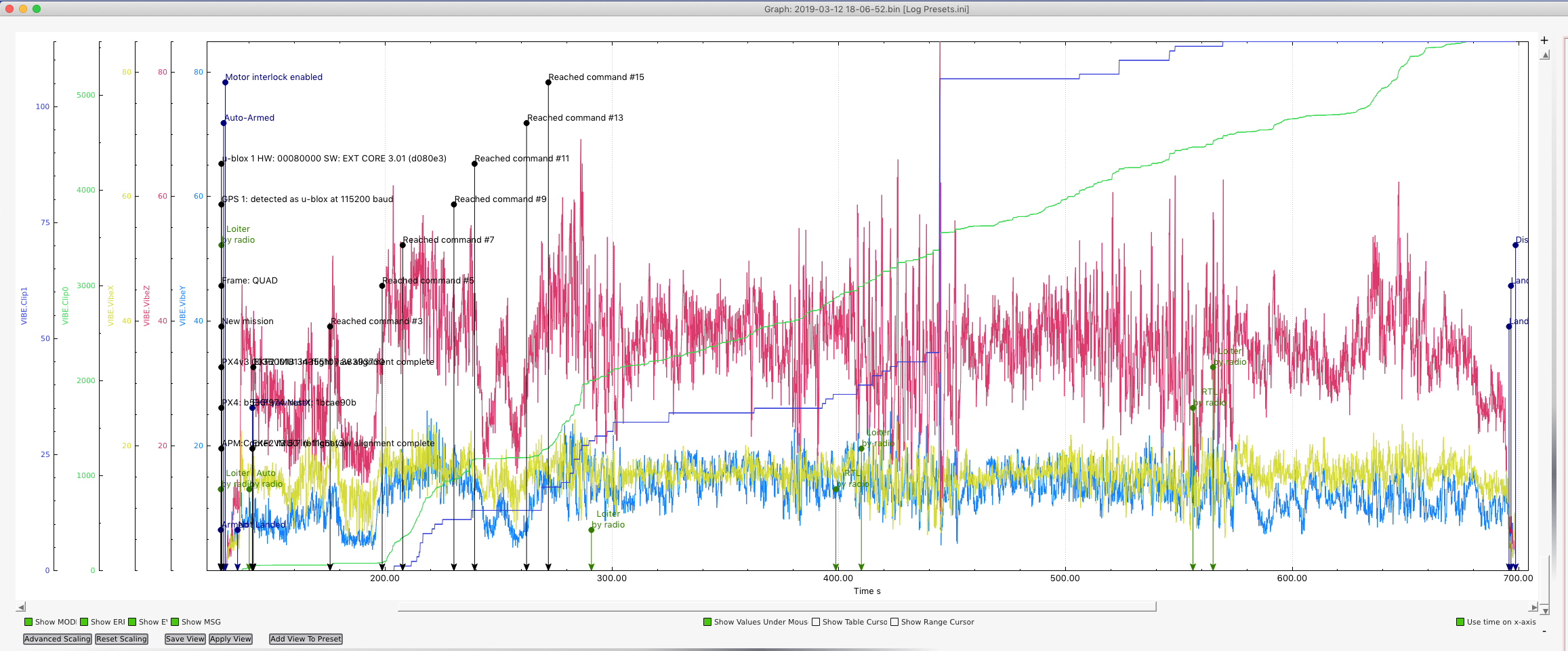
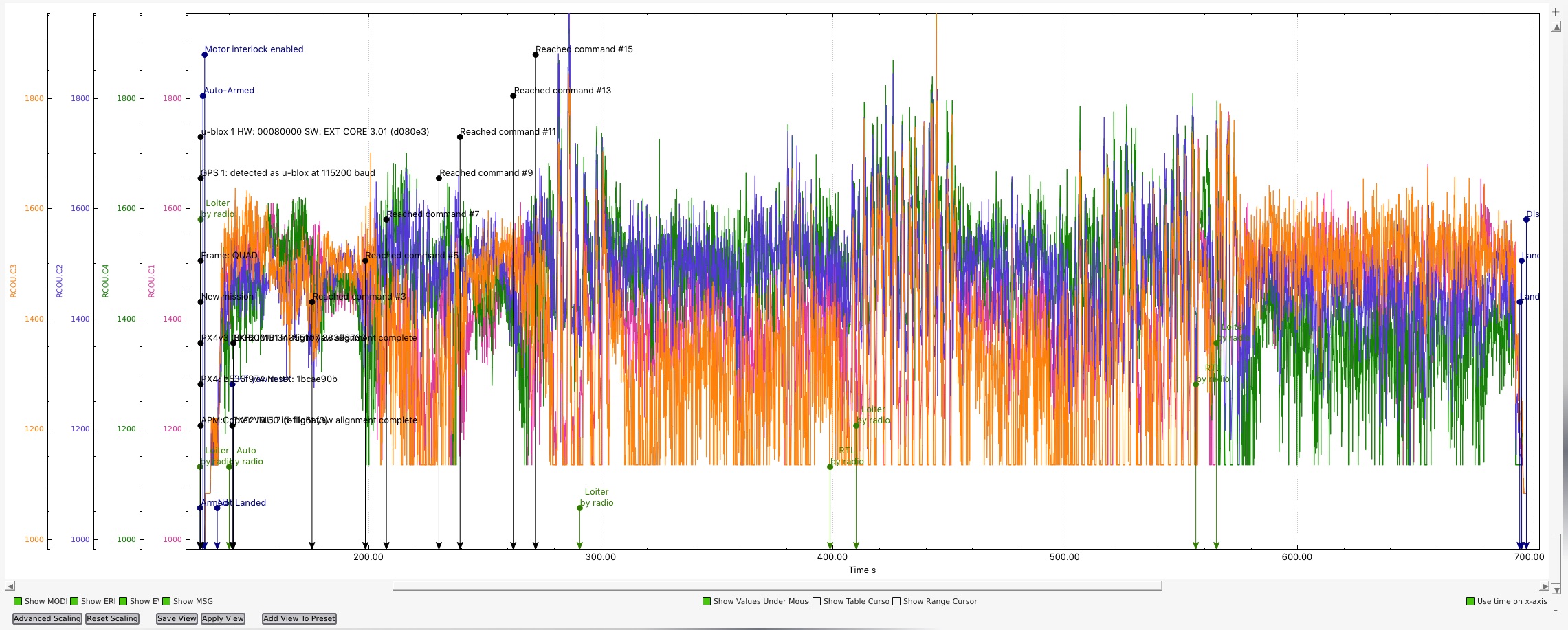
In the final flight drone we changed the battery (Note:there is sudden change in wind speed and drop in temperature around 3-4 degree temperature before 5th flight, which is common weather change in India during summer evenings) drone with velocity 7m/s in auto mode, the drone losses its control and wobbled like hell, expected to have a crash landing.It didn’t come to control even when we changed to manual gps mode, We took around 5 minutes to take control on drone ( to be honest we thought drone would be crashed) and analysed the logs but couldn’t find the exact reason behind it.
Here below drive link directs you to log file.
https://drive.google.com/open?id=1OpjtW0KCLUfB9j-rynKrzwHguaTnxFYi