My copter is a 30inch, 12S system.
After the physical setup, I have followed the docs and done the althold tuning, and then setup the dynamic harmonic notch filters. After that, the performance was good, but still I performed autotune, and I was pretty satisfied with the result.
My final goal being to attain 20m/s auto missions, I started out by setting WPNAV_SPEED to 500cm/s and started simple straight line auto missions.
Each time, after successful auto mission, I would increase the speed and acceleration.
At 15m/s and 3m/s/s, I noticed a small wobbling type de-stability when it was approaching a waypoint and slowing down for it. However, it corrected itself soon and was not an issue.
On continuing, I finally reached 20m/s and acceleration was set to 300cm/s/s.
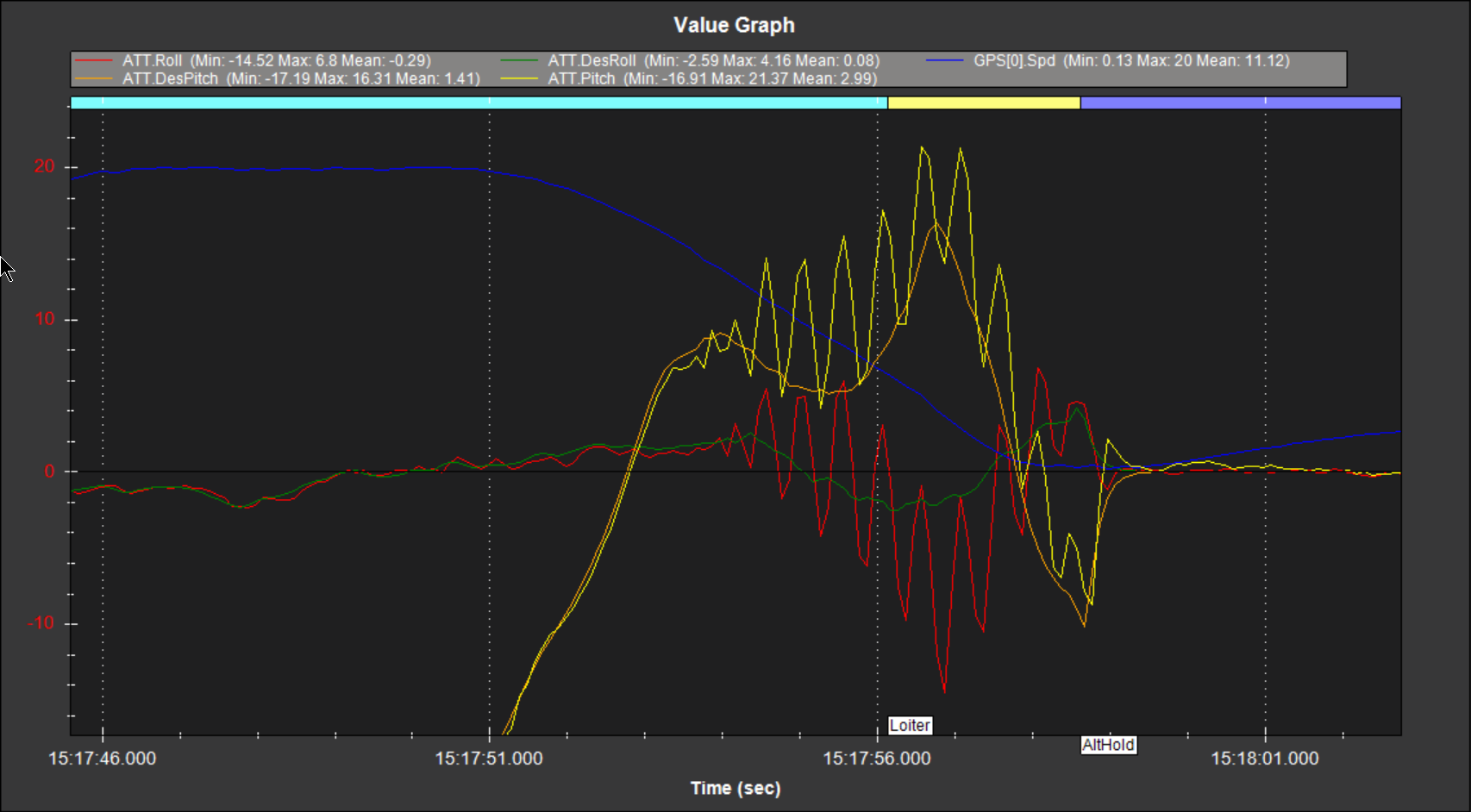
Conducting the same mission, at the same waypoint, again while slowing down before the turn, the copter lost stability. This time, it did not go away. I switched to Loiter mode, and it did not help. A seconds or two later, I switched to AltHold mode, and then it became normal again. There on, I switched it back into Auto and it continued normally again.
I repeated the same waypoints again at the same speed, but it did not repeat.
I would say it’s happening once in four times or so. It was a normal windy day.
Physically, everything is fastened properly, and the frame is pretty sturdy. Vibrations also seem to be very less while monitoring on GCS.
Any suggestions on how to fix this issue? And is it safe for me to continue trying 20m/s flights? Is it something in the tuning too be improved?
I would also like to know if anyone else has attempted these speeds on a 30inch propeller 12S setup, and what their learnings were from the experience.
Here is the log file and a snapshot where the instability occurs: