Dear ArduPilog community,
I have a problem with my mapping-quad (Black Snapper Frame - not symetric but perfectly balanced according to the manual, 15"props, T-Motor AntiGravity 4006, 380kv, Hobbywing X-Rotor 40A ESC, 6S, about 3,8 Kg . I have spend a lot of time with autotune with different settings and wind condition to find a good tune. The quad flies good in stabilize mode and acro (in my opinion). But when in auto-mode I have kind of a not stable/wobbly flight, especially when flying towards the wind direction and on way-point turns.
I have experimented with the Roll/Pitch P/D-value adjustment in flight with no success. Then I have red in some tutorial that the I-Term is important when it comes to smooth flying:
"> gentle, smooth flying for aerial photography requires much lower I-gain than aggressive acrobatic flight"
I have tried to tune a lot but I am still not satisfied. This is also because this copter is used for agricultural missions and the multispectral sensor has no gimbal.
My question is: where should I start, what parameter would be worth tuning or should I go back and do the autotune again, maybe with different settings?
Autotune has been done with AUTOTUNE_AGGR=0,05 to 0,10 (most of the time with 0,05), Roll/Pitch Filters on 10hz (ATC_RAT_RLL_FILT][ATC_RAT_PIT_FILT) - nothing more modified. For each tune I have set all the settings back to standard values.
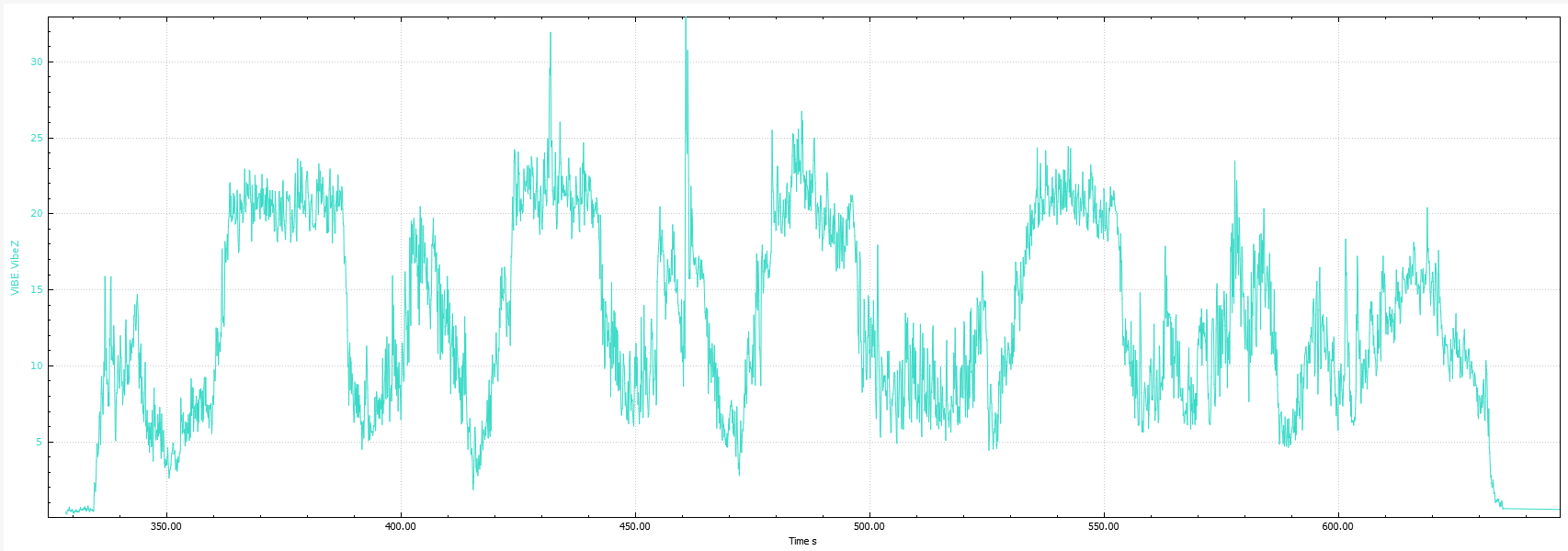
I have uploaded one logfile and the according video of three flights (one logfile, 3 video files) where I used my best autotune values, then lowered I to 1/3, then raised I to times 1,3). Auto-Mission and wind condition are the same.
Logfile
Video1
Video2
Video3
I could upload more logfiles/videos of different other changed parameters, like loiter pid etc which had in my opinion some effect, this could have also been different wind conditions…
Thank you for any help, it is much appreciated, because I am kind of stuck here with my knowledge of Arducopter…
Lorenz
Here are the used autotune PIDs, the of my autotunes I have also on google drive…:
| Date | Autotune Session | Log File | Config | Aggr | Lipo | Filter | comment | result | |
|---|---|---|---|---|---|---|---|---|---|
| 23.04.19 | 5 | 1 abends | Standard Values | 0,05 | 10000 | 10 | no wind | on acro a little bit unresponsive but stab ok | |
| INT: ATUN5b | yaw very slow | ||||||||
| Stab Roll | 8,84 | Rate Roll | Rate Pitch | Rate Yaw | ATC_ACCEL_R_MAX | 55067 | |||
| Stab Pitch | 9,282 | P | 0,117 | P | 0,16 | P | 1,45 | ATC_ACCEL_P_MAX | 42761 |
| Stab Yaw | 3,241 | I | 0,117 | I | 0,16 | I | 0,145 | ATC_ACCEL_Y_MAX (mod) | 10200 |
| D | 0,005 | D | 0,009 | D | 0 | ATC_RATE_FF_ENAB | 1 | ||
| IMAX | 0,5 | IMAX | 0,5 | IMAX | 0,5 | ||||
| FILT | 10 | FILT | 10 | FILT | 1,536 |