Hi. At first, apologize for my grammar. English is not my native language.
Please help me deal with the problem, decrypt the logs. I can’t solve it for more than six months.
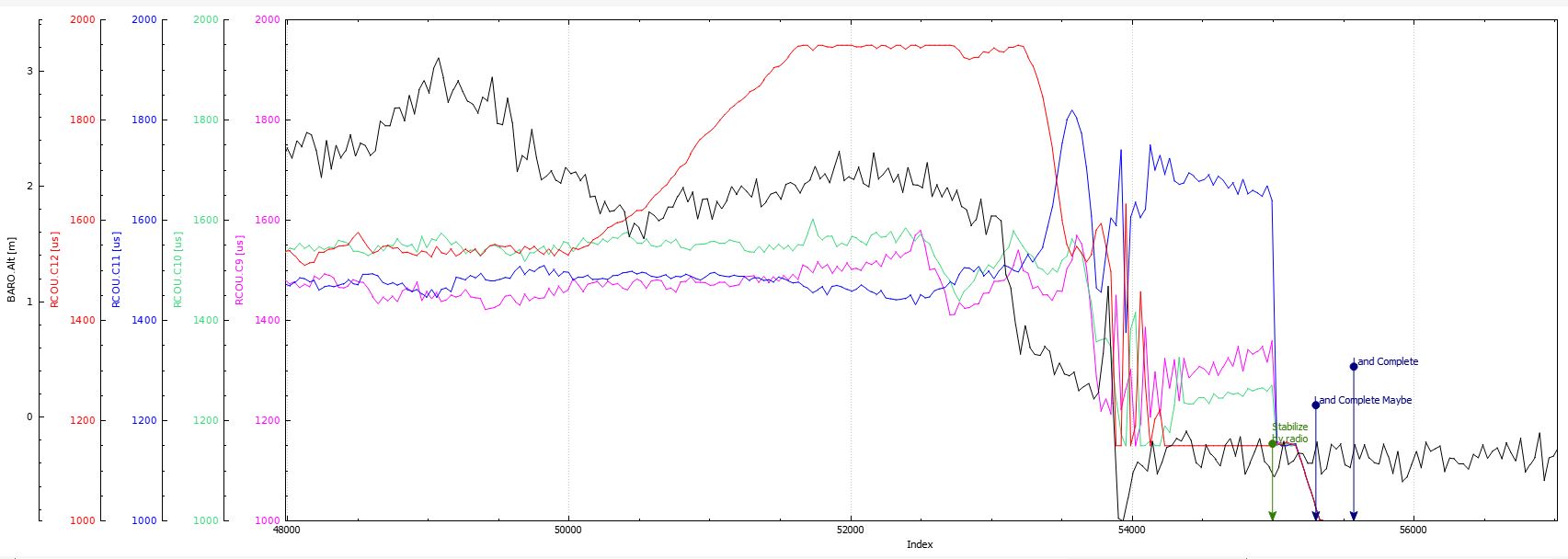
The loiter mode - arm start the motors, after the stick crossing the middle position, the delay 3-5 Second and the speed not increase. Then the engines accelerate and the copter takes off. Short time flies normally, then start to swin stongly, angles exceed 45 degrees and fall. In stab, althold modes, the problem persists.
Config: Daya680 frame, dji 3510 motors. ESC 4in1 iflight Succex mini 40a. Pixhawk 4 radiolink, current sensor with kit. Gps - hex here + on the stand, controller protocol dshot 150.
I tried to change: motors, ESC, screws, pixhawk, GPS, current sensor. I switched off additional equipment and removed. Changed the protocol from dshot 150 to pwm. Changed the firmware several times to different ones - with all these actions the problem persisted. I apply a log with a typical situation - takeoff is normal, without delay, a smooth flight, stable. Then he began to spin on YAW on his own and began to swing, landed it almost gently.
Log file attached