I have a largish coaxial quad running a black cube and a Here+ gps unit (although without the beacon for now). The drone is set to run an automission around a field. The primary compass is a Here+ and those in the cube (mags 2 and 3) are disabled (as they suffer from some throttle interference atm).
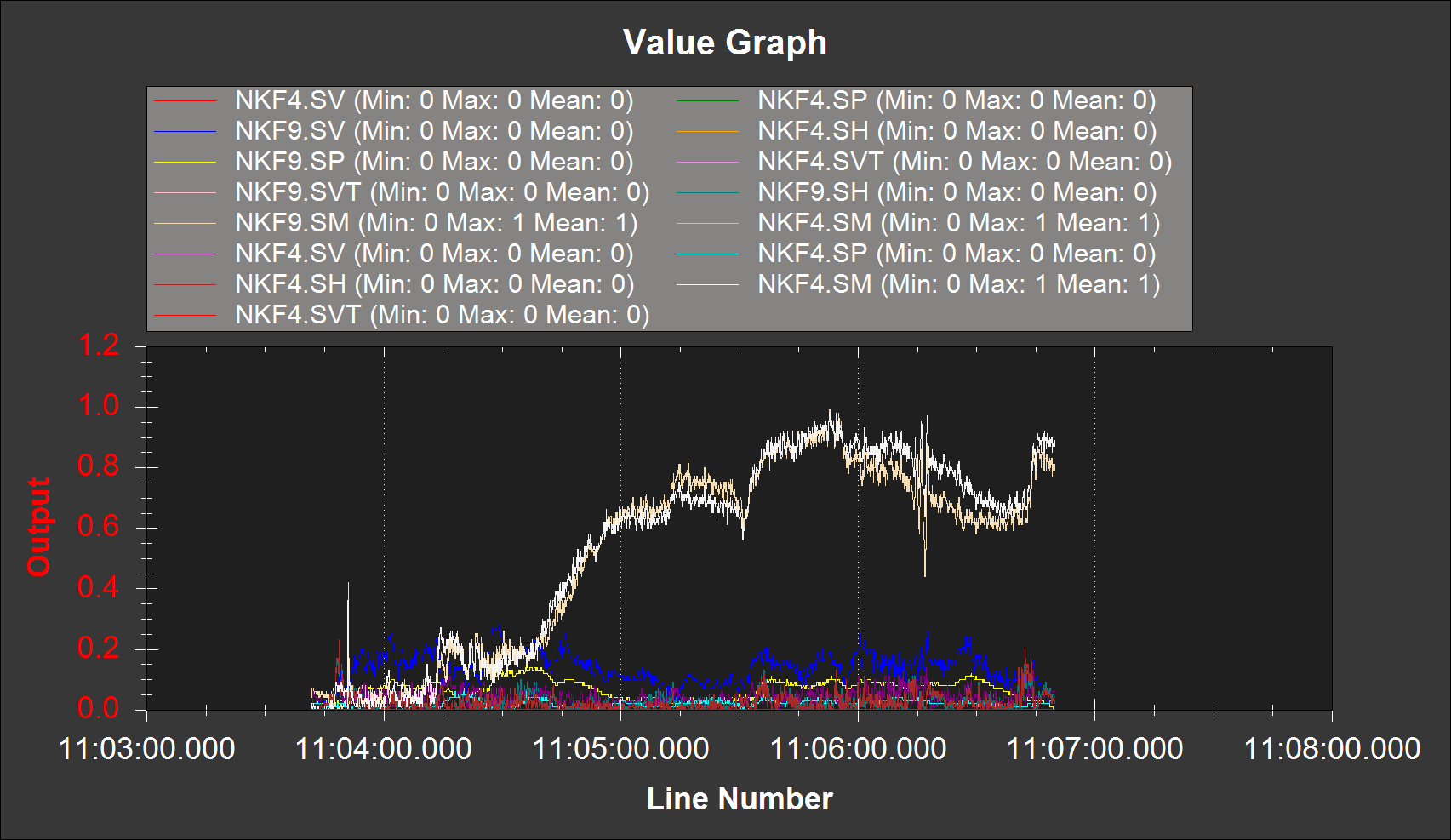
On take-off, the EKF2 covariance indicators are low, but most often the compass covariance gradually increases into the red. There are no visible power lines around etc.
Calibration was conducted successfully on default strictness for mags 1 and 2, with mag2 being subsequently disabled to rule it out of the problem.
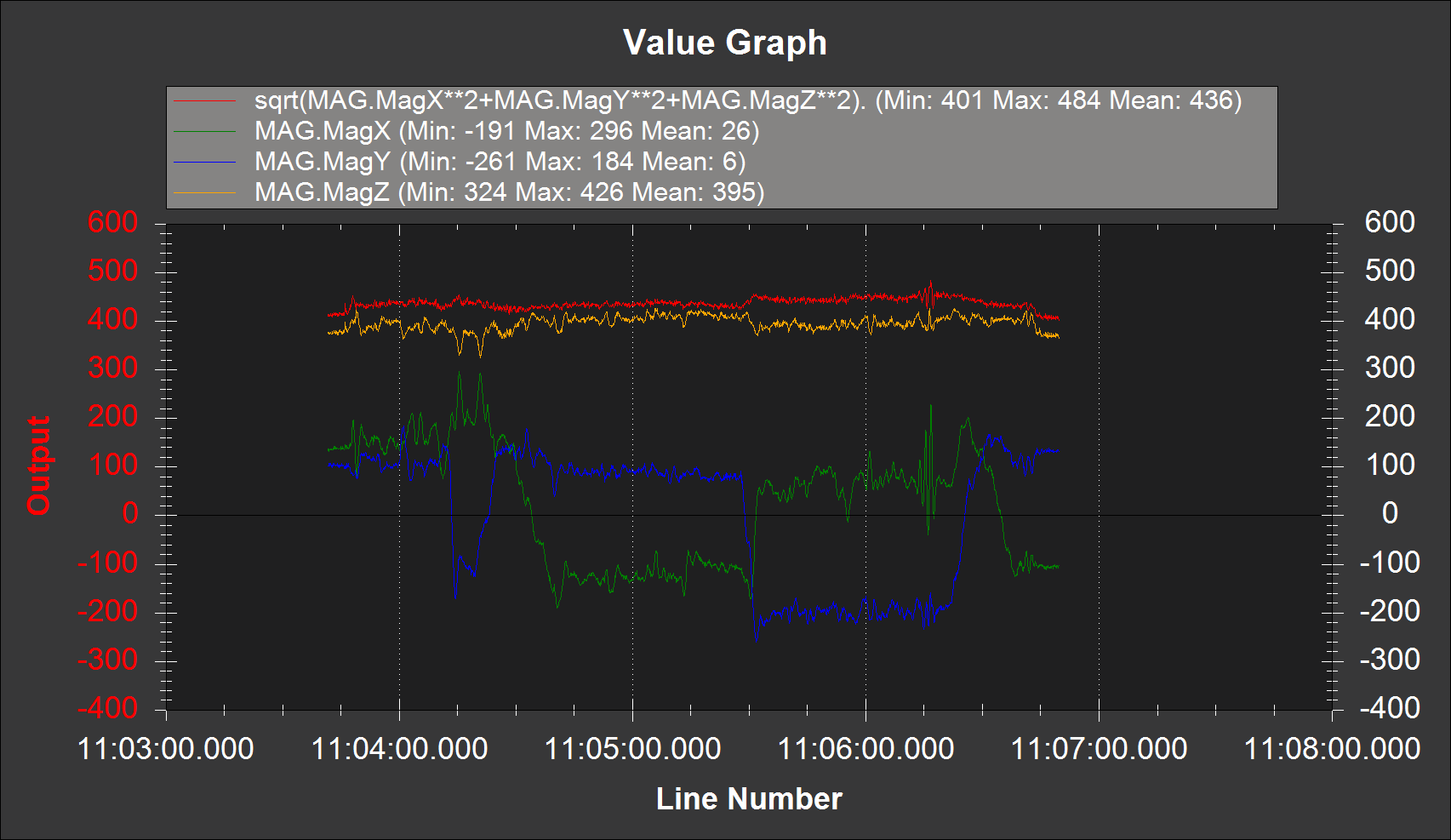
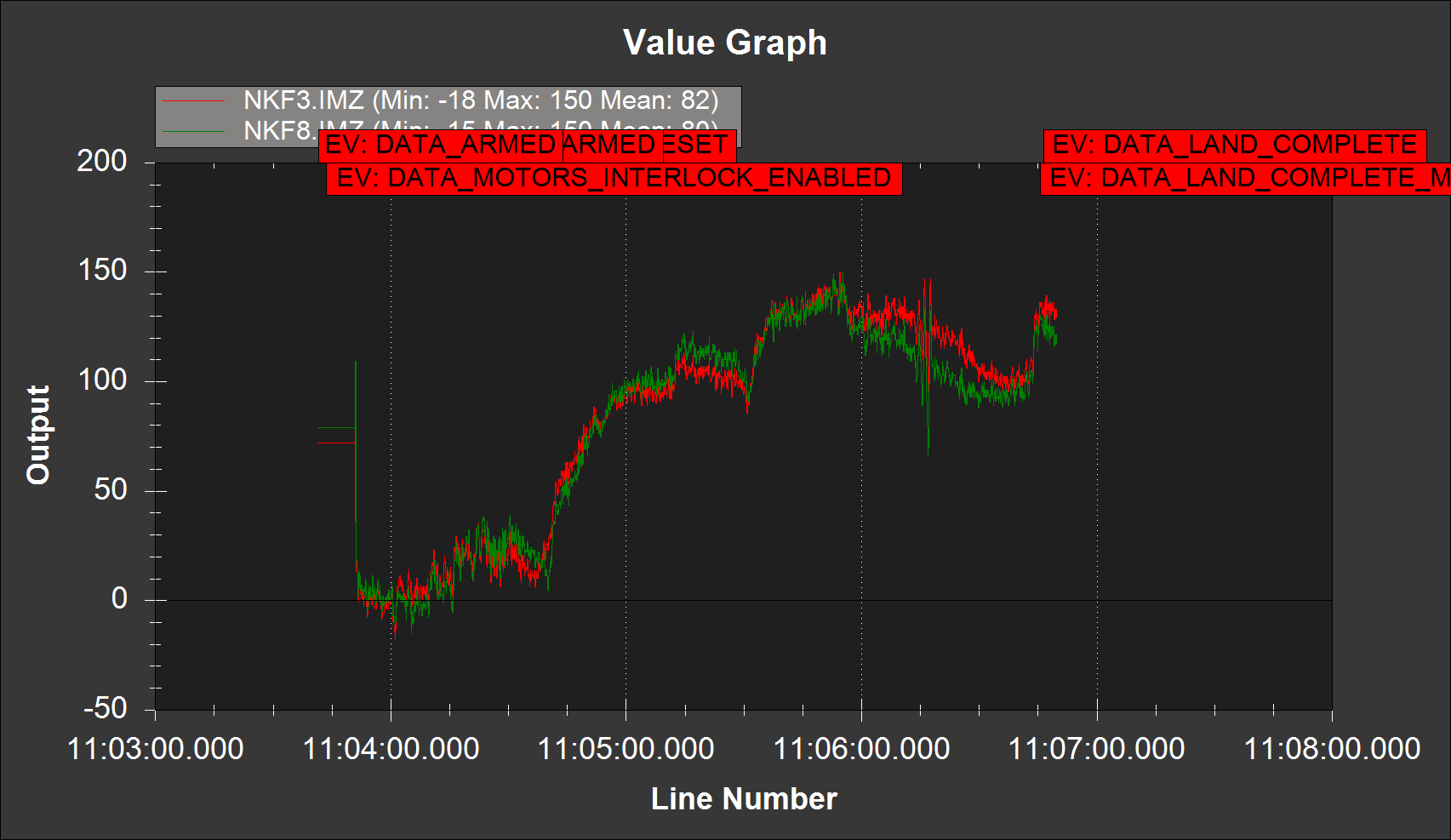
The total mag field for the primary compass seems solid, with little variance. This might explain why the EKF2 warning seems not to affect mission performance. However, the NKF3.IMZ (and NKF8.IMX) imu innovations closely mirror the indicated EKF compass covariance.
So I have 2 questions:
- Does this mean that even though mags 2 and 3 are turned off, they are still being used by EKF2?
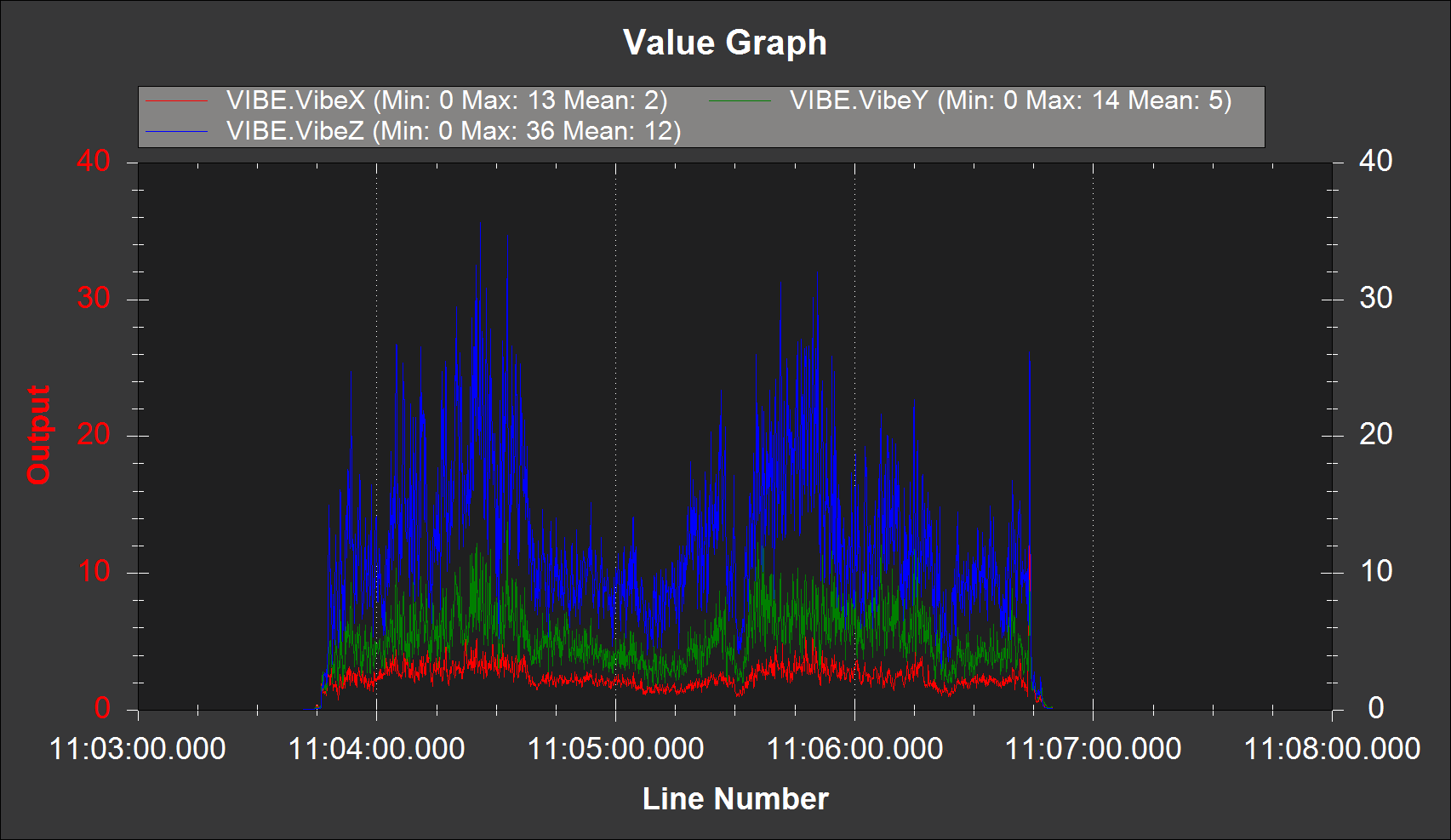
- Given the vibration is ok, mag1 seems good etc. what could be causing the increase in the compass covariance?
I have tried to attach the log file but the file won’t upload. Instead I have inserted some relevant graphs!
Many thanks.
2019-10-31 11-03-41.log.param (14.4 KB)