This happen in a 700 electric helicopter built as a mapping platform powered by a Pixhawk 2.1. It has around 40 flights after completing the tune phase in different scenarios, altitudes and with different payloads.
A couple of days ago I took it for a flight and half way into the mission the heli lost power during level flight, taking it to a uncontrolled descent that ended in a crash.
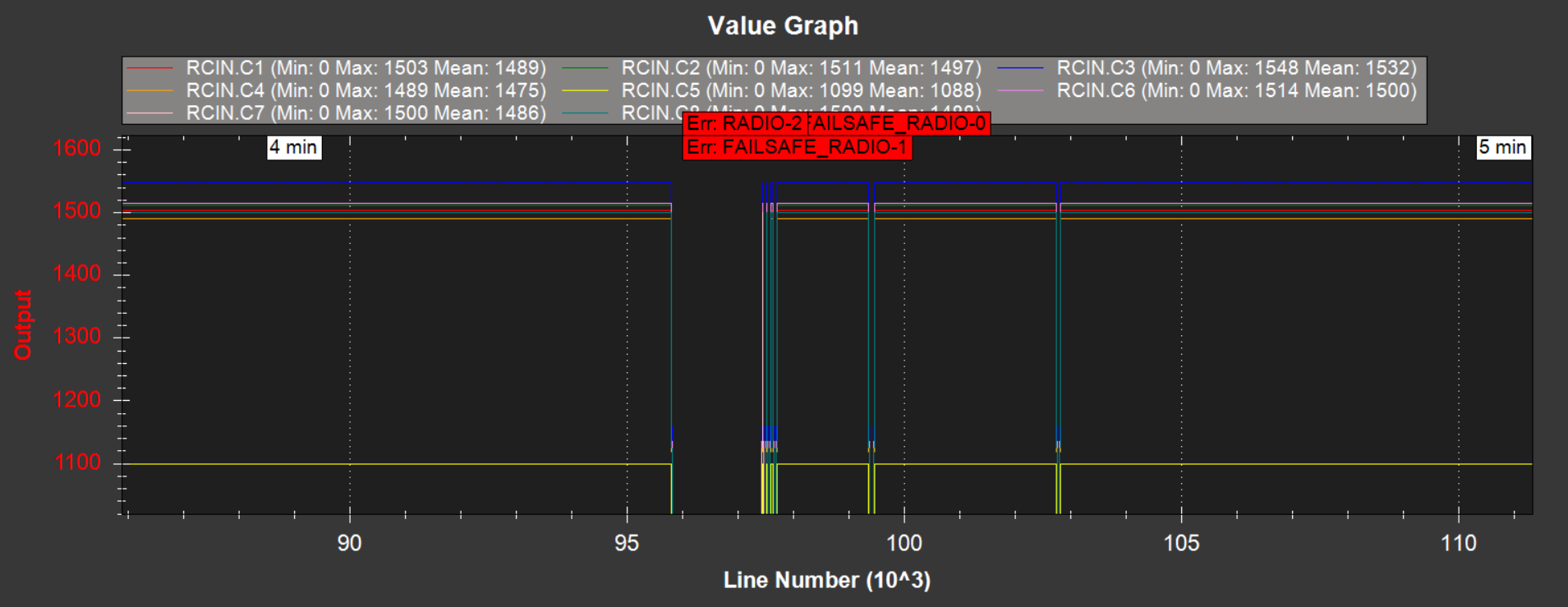
Reviewing the mission planner I notice that the “No RC Receiver” message was displayed a couple of times and initially had no relation to the incident. I normally set up the FS_THR to 2 “Failsafe Enabled Continue with Mission in Auto Mode” because my typically mapping project will need for the heli to go beyond line of sight, and it will be usual for me to get the “No RC Receiver” in the screen while flying with no repercussion whatsoever.
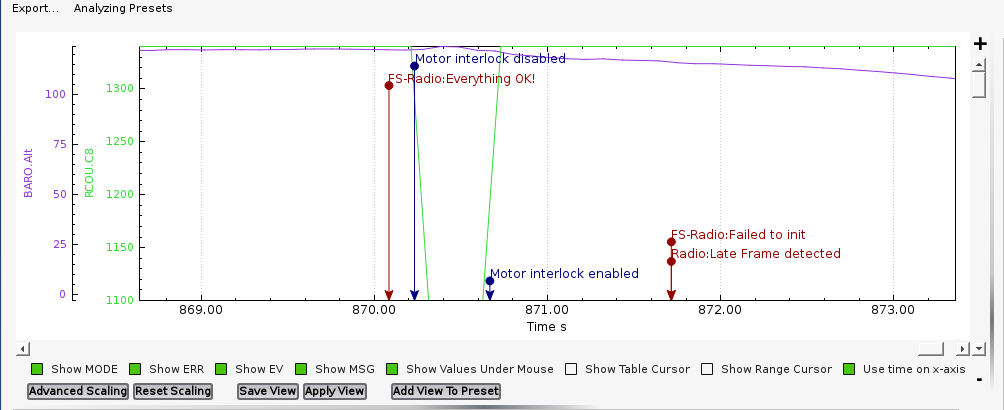
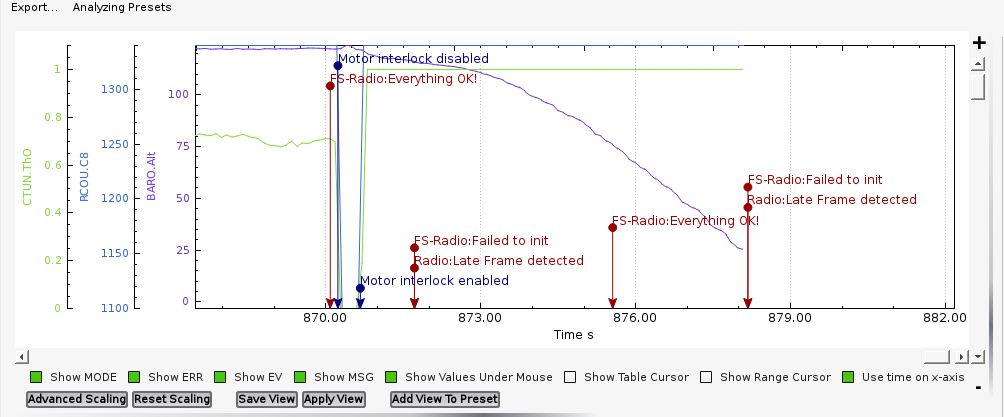
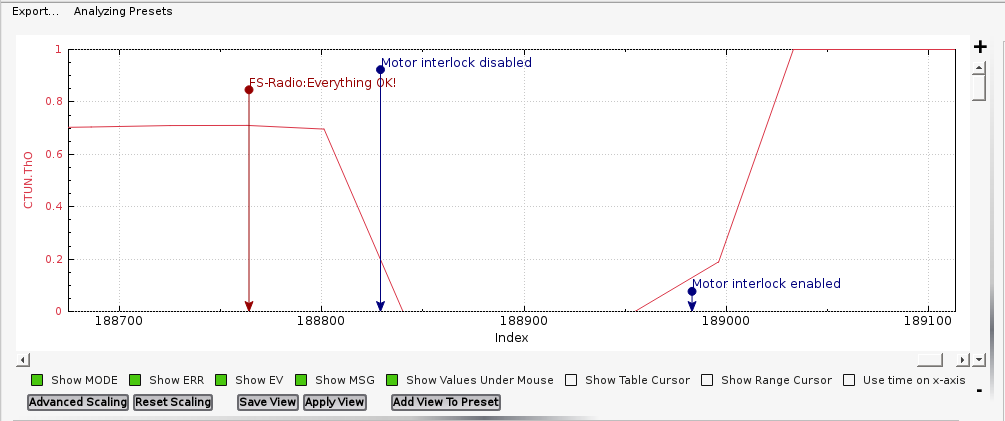
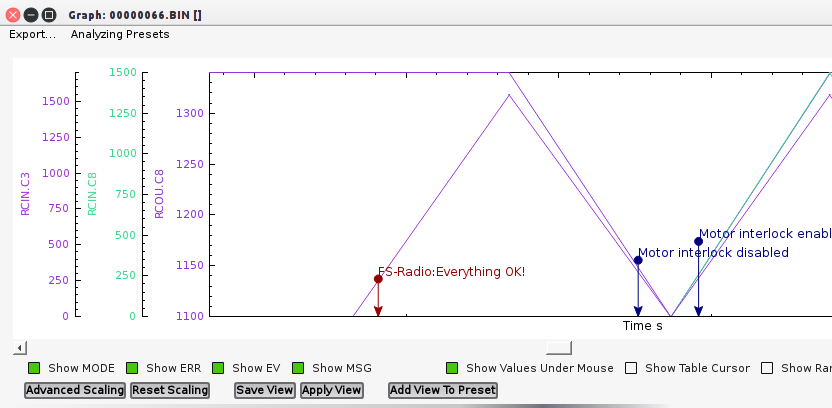
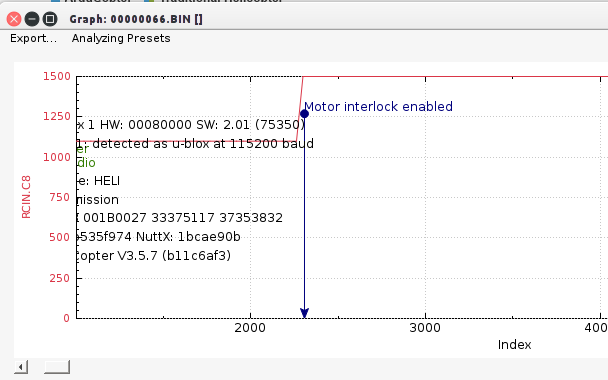
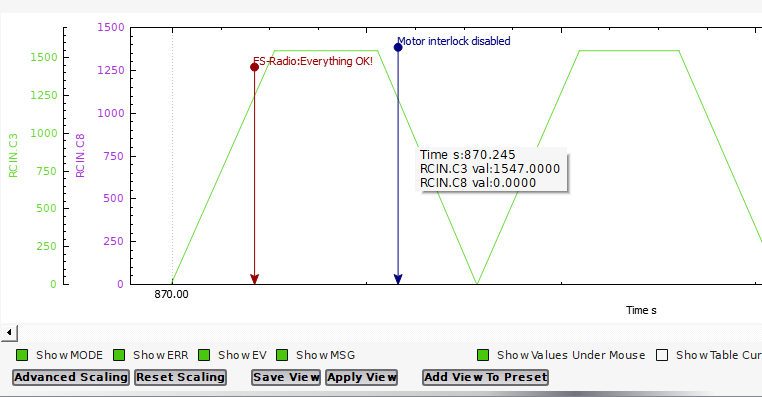
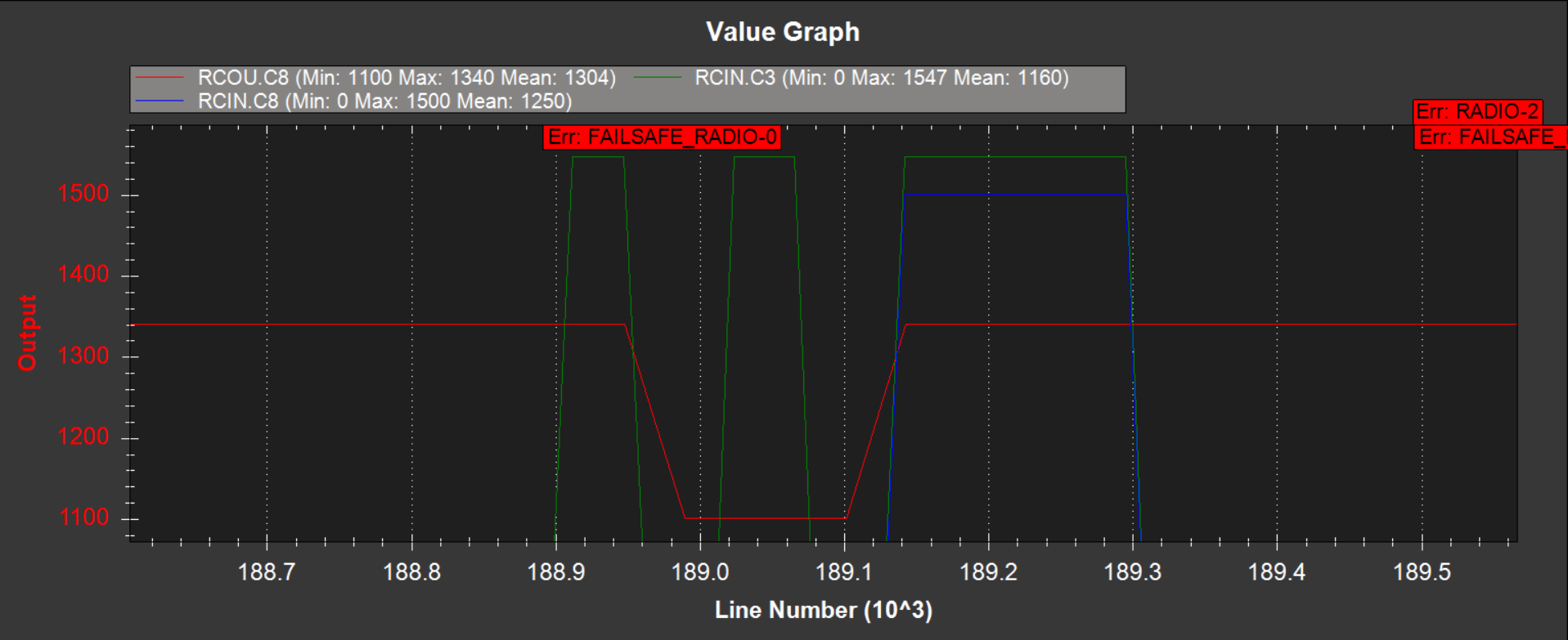
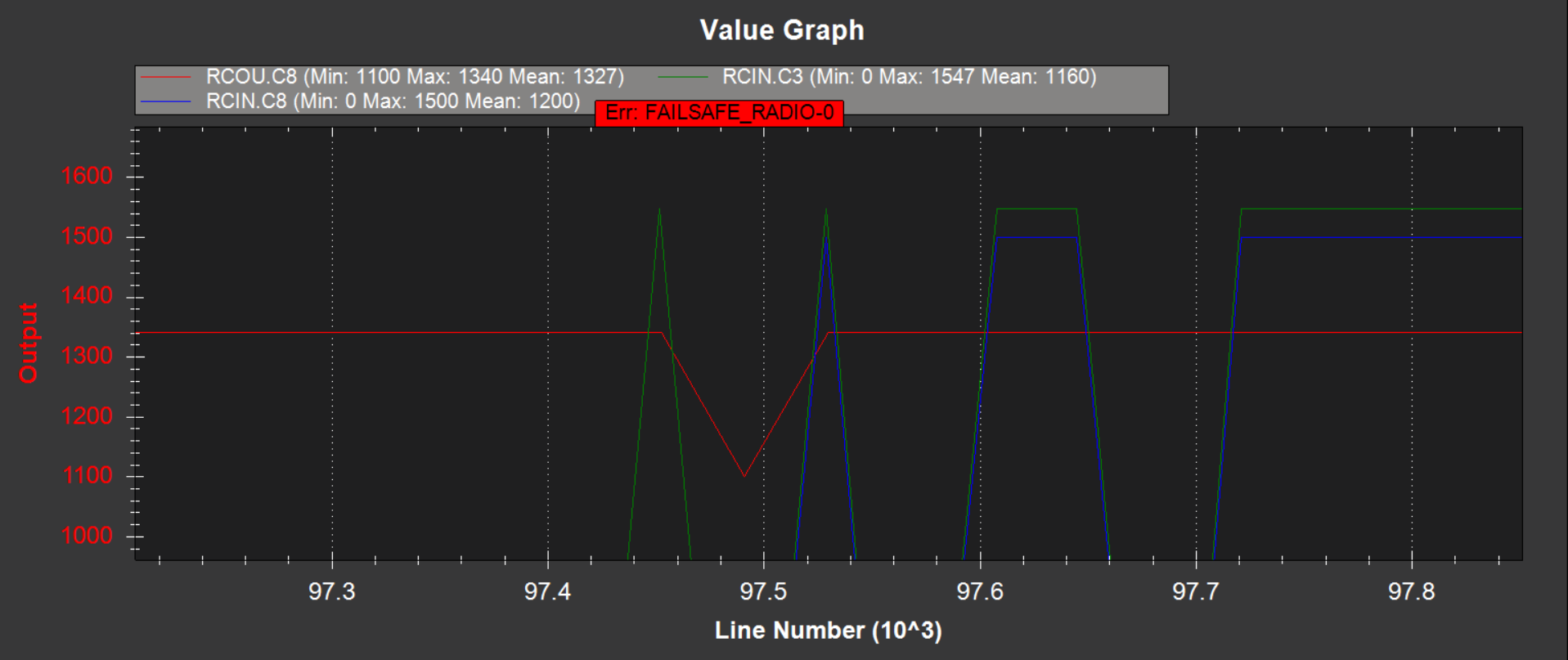
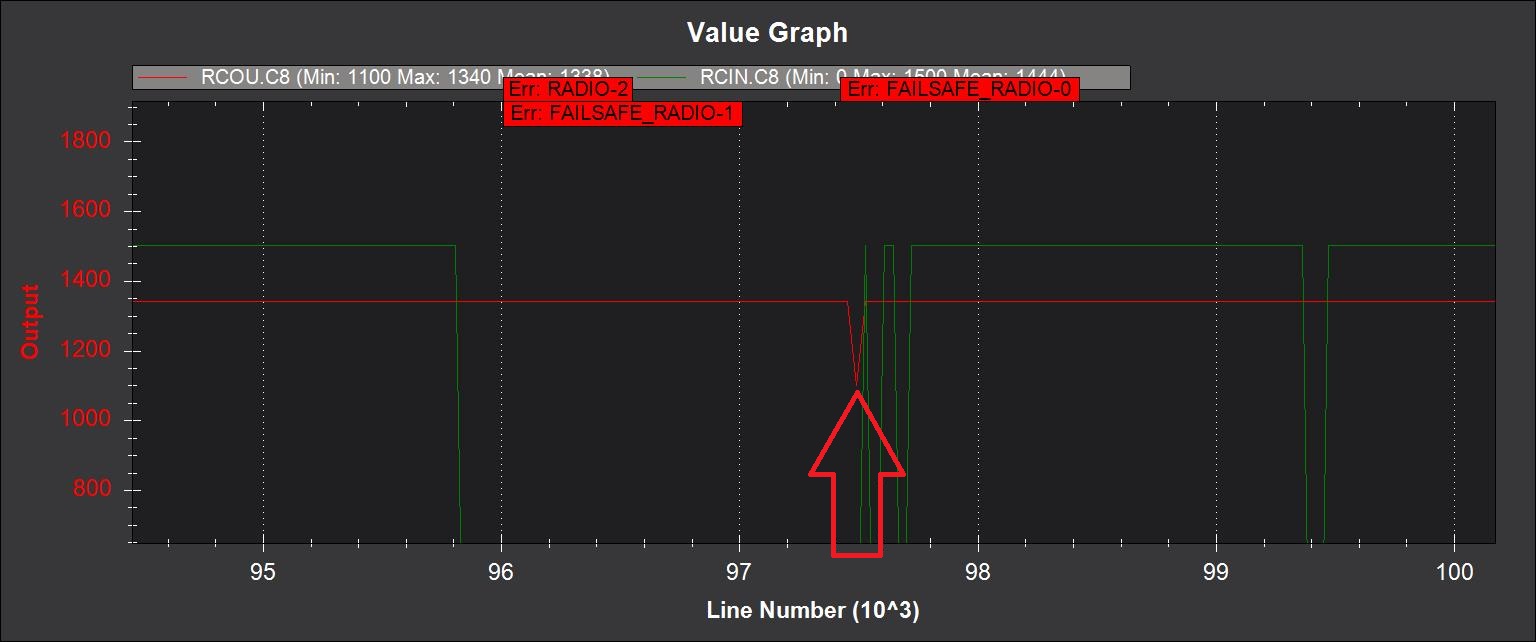
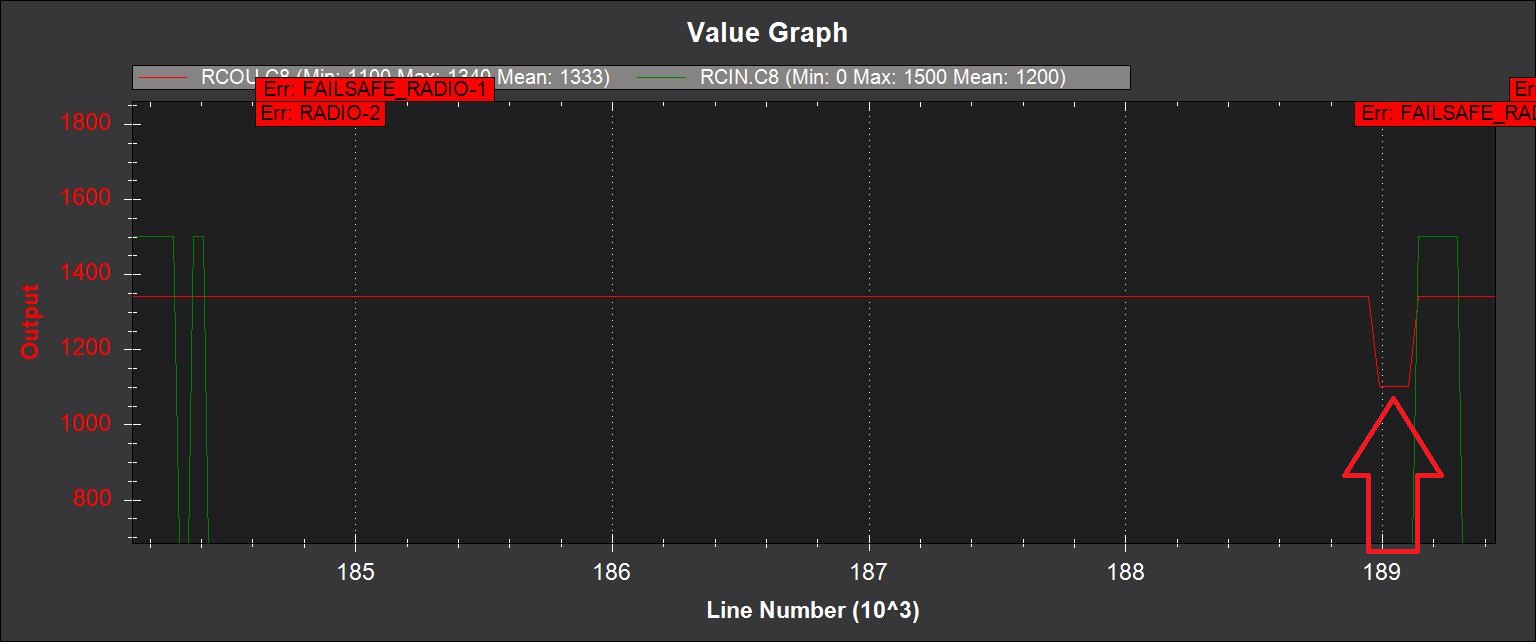
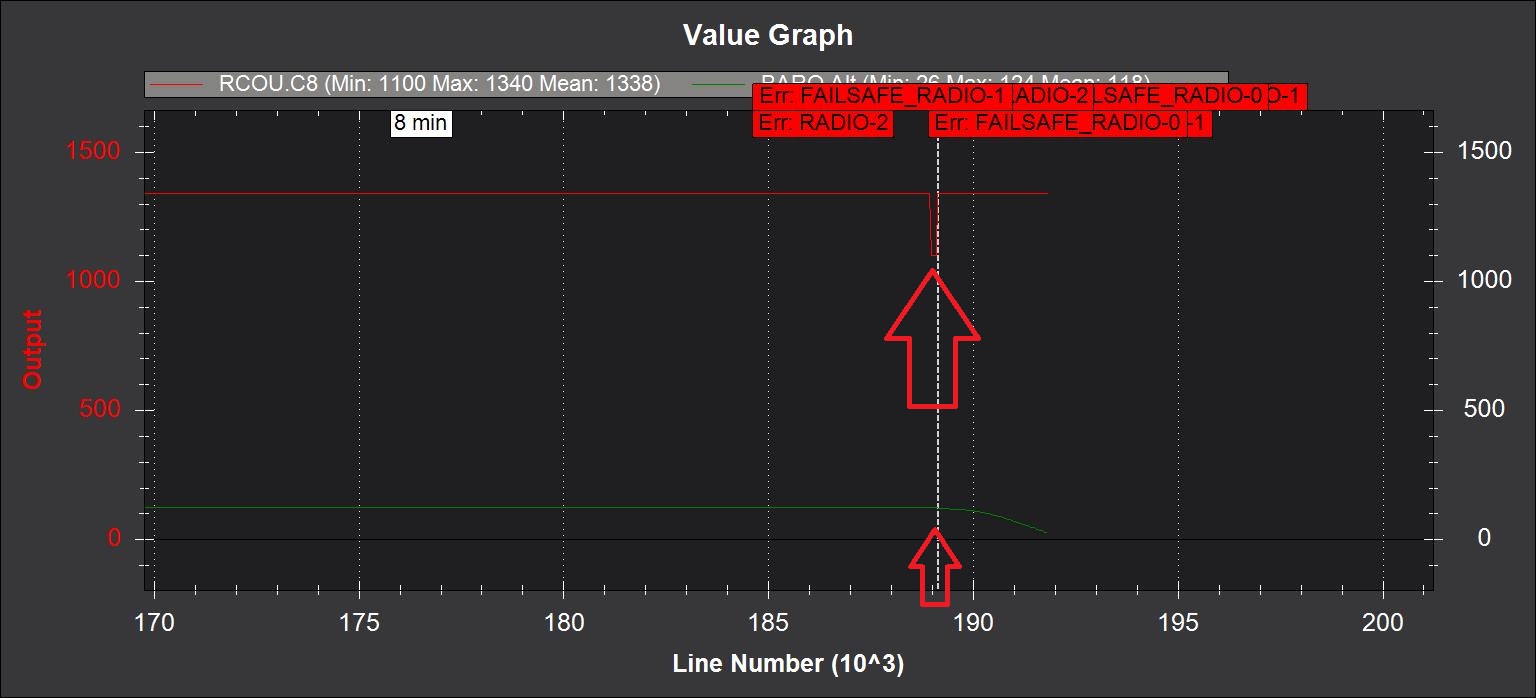
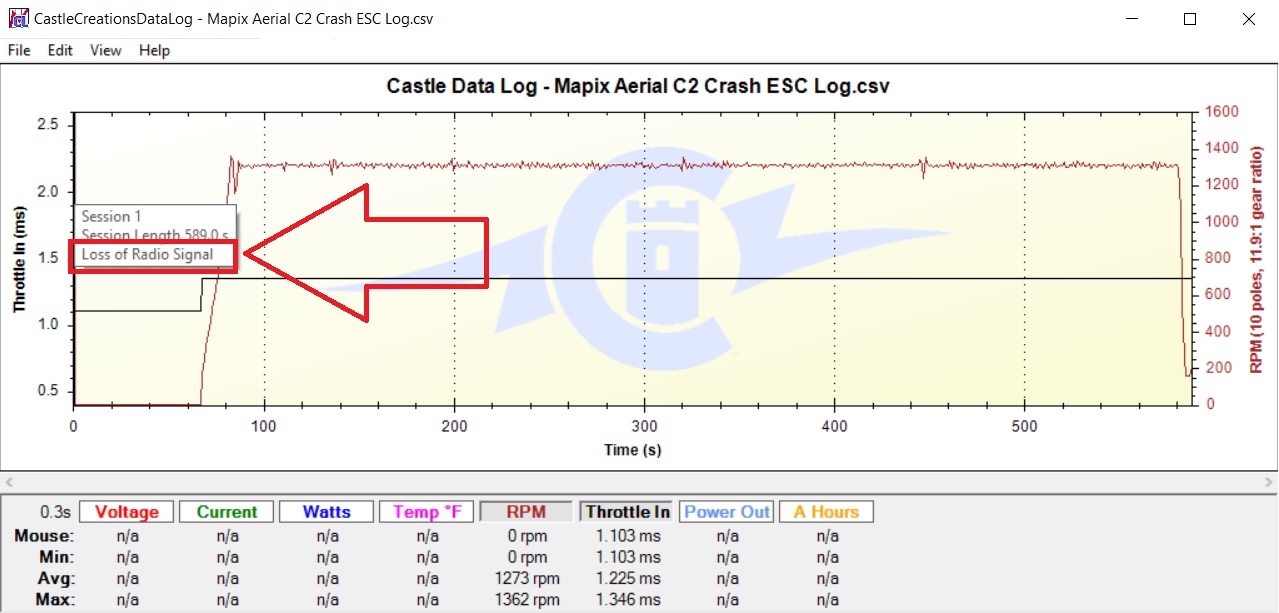
In the post crash inspection, all wiring of the servos, esc, bec, batts and motor looked ok with everything connected and no broken wires. Looking into the log file did notice that a couple of seconds after the 1st Radio FS error, the Ch 8 aka Heli RSC had a pike downwards (graph #1), but after the 2nd Radio FS error, the Ch 8 went to 0% (1100 pwm) for about 2 seconds (graph #2), coincidentally at the time of the power loss (graph #3).
Graph #1, RCIn Ch8 vs RCOut Ch8
Graph #2, RCIn Ch8 vs RCOut Ch8
Graph #3, RCOut Ch8 vs Baro Alt
Any idea on what might have caused Ch 8 going to 0% even with the FS_THR set it to what it seams to be the correct parameter? It seams that the radio signal loss had some effect in the Ch 8 behavior.
Digging some more into the logs, ESC log showed an error msg that said “Loss of Radio Signal”, that might confirm the actual Ch 8 behavior on the pixhawk…
Anyways, I will review all the information with more details to see if i’m missing something, and bellow is the link to the google drive where I have uploaded the logs, telemetry logs and parameters files.
https://drive.google.com/open?id=1evyyJIFPYXc4e94d3LHbYo8OcVS7B-CM
BTW, the same mission was flown a week before, with the same “No RC Receiver” messages during auto operation but without any anomalies in the Ch 8 output (log #65 in the google drive is frome this flight and log #66 is from the flight of the crash).