I am looking for some advice from someone that knows more about the flight logs than I do. I have only experienced this twice now but was at the same site each time. I have flown many other sites between these two experiences with no problems. I want to make sure I don’t have a serious problem that is just starting to show its ugly face, and hopefully I can prevent a future problem. What is happening is when in auto mode during a mapping mission the copter will suddenly start to climb in altitude and drift to the Northeast completely off course like someone manipulated the controls. It will continue until I change the flight mode. Yesterday I was able to change the flight mode to Position Hold and then back into Auto and it went back to the flight plan and dropped down to the correct altitude and continues the mission without problems. Like I said this has happened 2 different times at 2 different places in my flight plan. I uploaded the flight bin files for analysis at the link below. In the link there is also a bin file from when the copter started to lose altitude after a mission was done (same site) until I manually took control. Please let me know if you need any further information.
Drone: Hexacopter with Pixhawk running 3.5.5 and now 3.5.7.
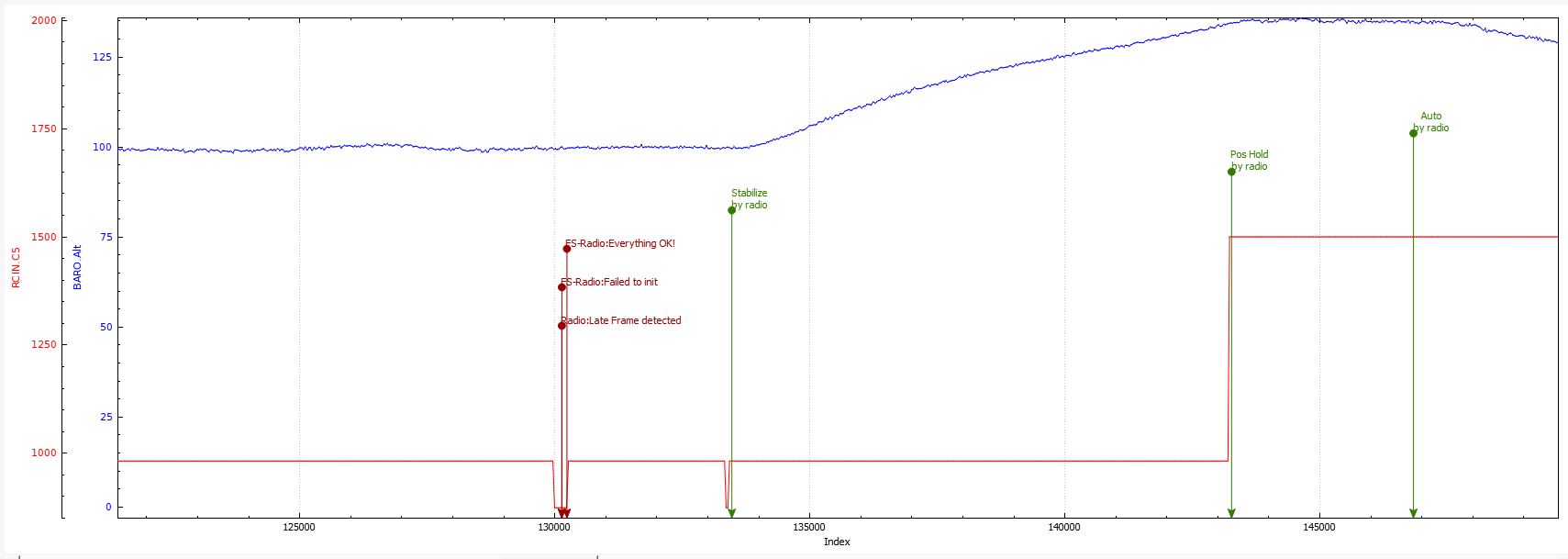
This sounded very familiar as it has happened to me several times. The cause of my problem was a glitch on Chan 5 which switched the flight mode to Stabilize. I see the same thing in your log as per the attached. The switch to PosHold can be seen as you say. Can I ask what RC radio system you have?
Yes Andras I experienced this after I installed a Frsky 915Mhz system and suspected it was an Sbus glitch but not sure. I never saw the problem with 2.4Ghz radio I had in the craft. It often occurs at the same time the RC signal is lost and I have “no Pulses” set. Of course I also have “continue with Mission” failsafe. I have not gotten to the bottom of this problem yet.
It could be a faulty radio but odd that it only happens on this site. These two situations are about a month apart. I have my radio failsafe set to continue with the auto mission if i loose telemetry with the transmitter. Please see screen cap. Thank you.
Yes, I saw that in your parameter file. This is a mystery to me also with my problem. I have flown 100 missions probably in the same general area and then this crops up recently. Maybe others can offer some insight. Did you have this problem on 3.5.5?
I think I know what happened. If you take a close look at the rc5 channel, the failsafe is handled correctly.
A late frame detected, failsafe initiated, and then failsafe cleared. The problem caused by the small glitch that pulls all channels down for one frame right after the failsafe is cleared.
Your auto mode is on aux_ch7 and mode switch have a priority over aux switch, so that little glitch switch to stabilize.
I think it is definitely a radio problem, handling near failsafe situations (or intermittent interference). Late frame errors should not occur in normal situations with sbus.
If you set your ch5 to switch auto mode it will overcome this issue.
Other solution is to use an RFD900x radio, it has PPM passthrough, 1W output and it is a professional equipment, not a hobbist toy like the R9…
What you have explained makes since and i appreciate your detailed analysis to figure out the problem. I will look into switching my auto mode to ch5. Thank you also for the recommendation with the RFD900x radio. If I do that will it interfere with my 915MHz radio I am using to monitor the flight in mission planner? Also will I have to purchase a new transmitter or can put an add on to my Taranis X9D? Thank you.
Actually RFD900x will replace your telemetry radio and remote control.
It is not available in module format yet, but you can use it as a relay, connect a normal 2.4 PPM receiver to it’s PPM input. An your PC to it’s serial IO (with the provided USB cable).
(You have to power it from a separated BEC onboard, since it use a lot’s of power in 1W mode)
Id also like to report that I experienced the same issue, but this time I placed the Auto mode in Channel 5. My Channel 5 is a 3 position switch (Auto, Alt Hold, and Pos Hold), but it displayed Stabilize for a very brief moment (about 400ms).
Ill be posting the logs here, and also open a new topic for the community to help.