My S550 hexacopter with pixhawk 2.4.8 is paning to left and unstable and then crashed when it touch down. I don’t know what is happening.
please helpme with this
here is the log file
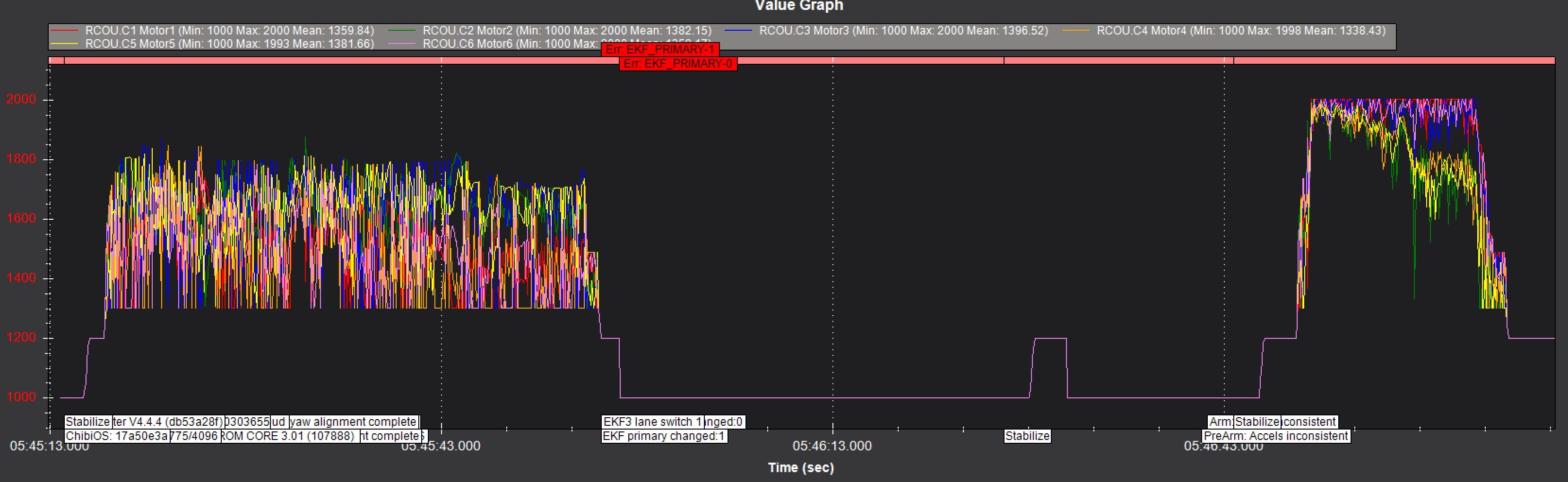
The outputs are oscillating badly and you don’t have battery logging. Follow the tuning guides/blog for the former and perhaps the later explains the 2nd event shown here with all outputs at max:
is there any reason for that?
how do I solve it then?
stiffen your frame, balance props and, if possible, motors, do the imu temp cal, set up battery logging…
then test again.
I recommend you follow the tuning blog and redo everything you missed so far.
OK I will do it and let you know
Thanks
You have a lot of small issues to fix here. And you have the IMU temperature compensation to do.
Once these are done, we will probably find other issues. And once those are done, we will find some more.
So it is better to work methodically and do it in an order that is known to be safe for people and material. And it will spare you some iteration loops.
And post your hand edited intermediate .param files.
OK
@amilcarlucas
First I will tell the incidents happened with the drone
I made the drone by referring ardupilot and youtube tutorials
At the first flight it started to flip
The motor order and propeller was in correct order
I did recalibration for several times but it didn’t make any changes
Then I reset the FC [first I installed rover and the reinstalled the hexa then I reset it using physical buttons]
Nothing changed
After many unsuccessful attempts I found in a forum it said check the trim parameters. The problem was there. Motors had six different values. So I made all of them equal.
Then the flipping issue was solved.
Then a new issue occurred as when it get in to sky it was panning to left with its own. And also very unstable.
Now I want your help to solve these issues.
And also I have a questions,
1 How do I choose the correct firmware out of fmu2 fmu3 pixhawk 1 etc.?
2 Why the trimming parameters didn’t reset after many resetting attempts.?
3 Do pixhawk FC needed to calibrate evry time when it turned on like dji naza ?
And the most important thing is I’m using the cable instead of telemetry.
@amilcarlucas can you help me with this.
I will go with the option 2
- post a picture of the FC, how am I to guess it?
- You are not following standard procedures, anything can happen.
- No no need to recalibrate before every flight.
Here is the pic of the fc

And also I forgot to say my built in compass is not working so I have already disabled it
I started to follow the methodical tuning procedure I will let you know the results
Remove the rubber mounts and use 3m tape for starters. ![]()
@amilcarlucas @Quadzilla @dkemxr
My firmware is fmuv3, is it OK? but I’m having that baro alter error also. Do I need to switch to pixhawk 1 or pixhawk 1M or fmuv2
How do I find out which one is correct?

What error?
Fmuv3 or Pixhawk1 is typically correct for those. Fmuv2 is never right.
@amilcarlucas @dkemxr
here is my latest flight logs now my hexa is flipping with one side underpower motors.
00000002.BIN (944 KB)
00000001.BIN (293.1 KB)
Here is my parameter list
PARAMETER.param (16.5 KB)
check and confirm is there any changes needed
MY esc is 40A
battery is 3s 5000mah
motors are 980kv sunnysky
Propelers are sunnysky cw ccw porpeller set
Is that a joke? This is on default parameters. What happened to this statement?
Then that is the problem that I also have. If all the parameters are default and then why left side motors get higher speed than right side