I am configuring a quadcopter with AC4.0.3, connected to MP via telemetry link. Everything is set up, but when I try to arm the copter the PreArm message “Waiting for Terrain data” pops up. The computer on which MP is installed has an internet connection, the copter has good GPS signal “GPS: 3D fix”. And on the flight planning tab the SRTM height is shown for the whole area in which I’m planning.
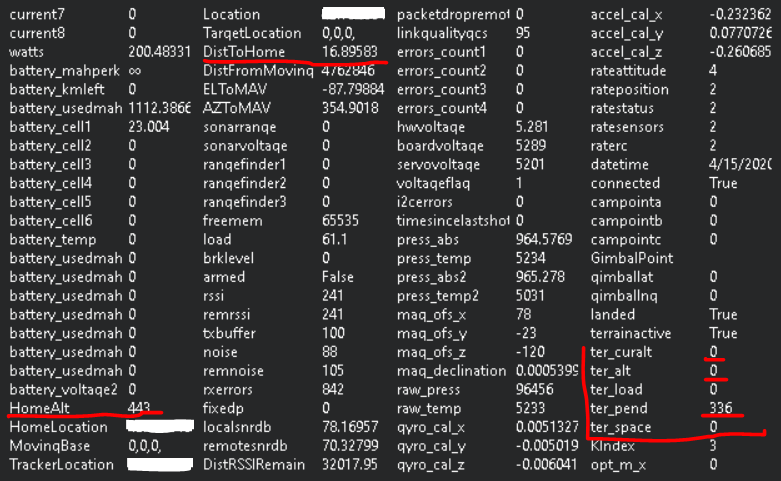
I also attach a screenshot of the status tab. In this image you can see that the ground height of the home point is known, the distance between the drone and the home point is only 17m but still the ground height is unknown (ter_alt and ter_curalt equals zero) and there are 336 tiles to download.
The only way I have managed to avoid this PreArm message and arm the copter is by deactivating the TERRAIN_FOLLOW parameter. But I would like to keep using this feature for the RTL mode.
ok lets take few steps back. So when you run Mission planner (Assuming latest release) and connect to your FC with GPS lock. Do you see something like this?
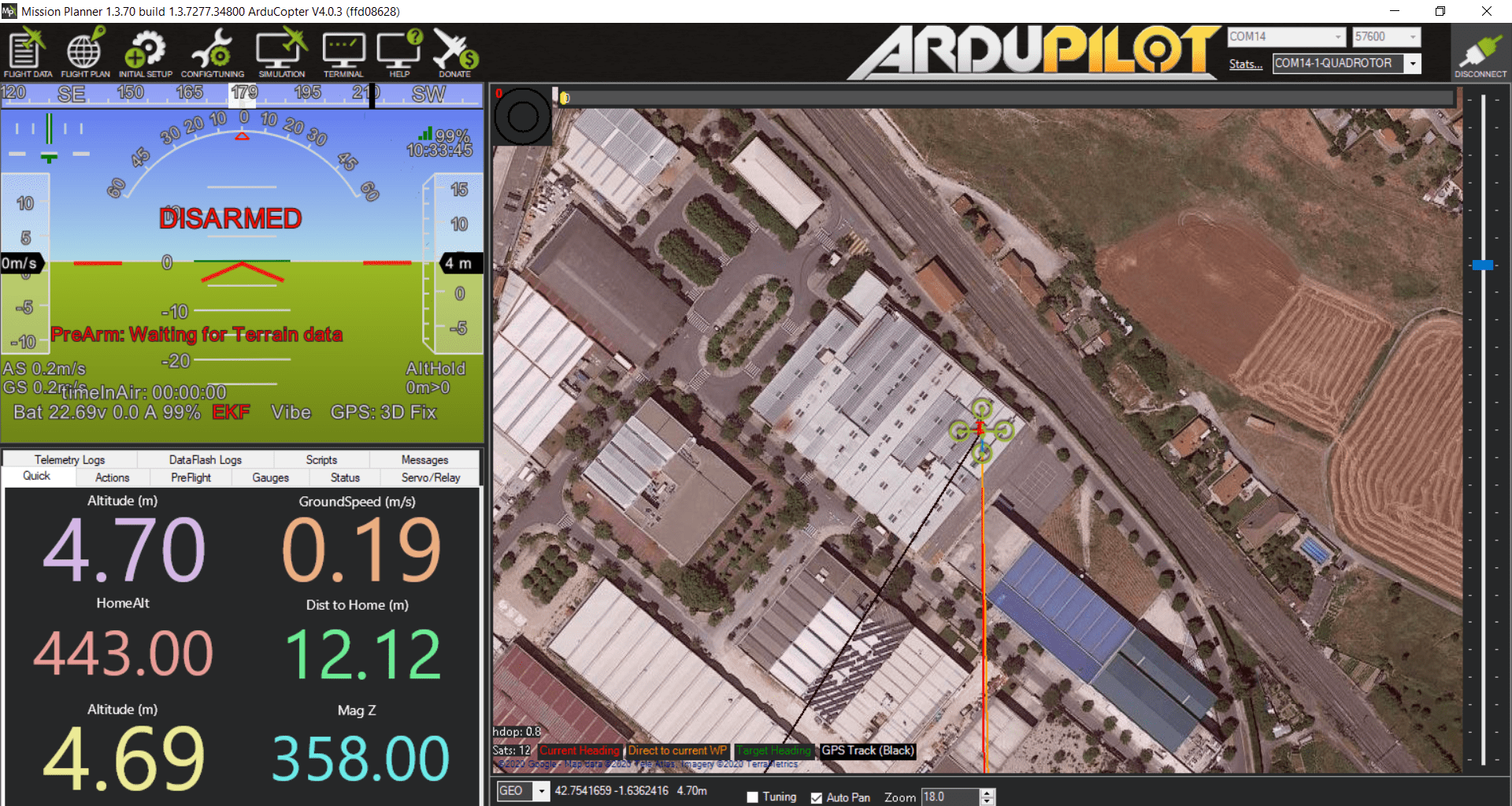
I have reinstalled google earth pro and then mission planner, both in their latest version. Here is a screenshot of the main MP screen with copter connected and GPS lock.
I confirm that the parameter terrain_enable is set to 1. I’m also surprised that ter_pend equals 336. Plus, it’s always that value, I don’t see it changing.
As far as I know, I haven’t planned anything that far. Besides, I’ve been planning small missions near the home point, where I do have SRTM terrain data in the planning tab, and downloading them into the drone.
The SD card in my opinion is good. An 8Gb Sandisk.
The prearm message pops up in any flight mode alt_hold, loiter, etc…
You can see the number of satellites in the lower left corner of the map. Sat count equal to 12 satellites
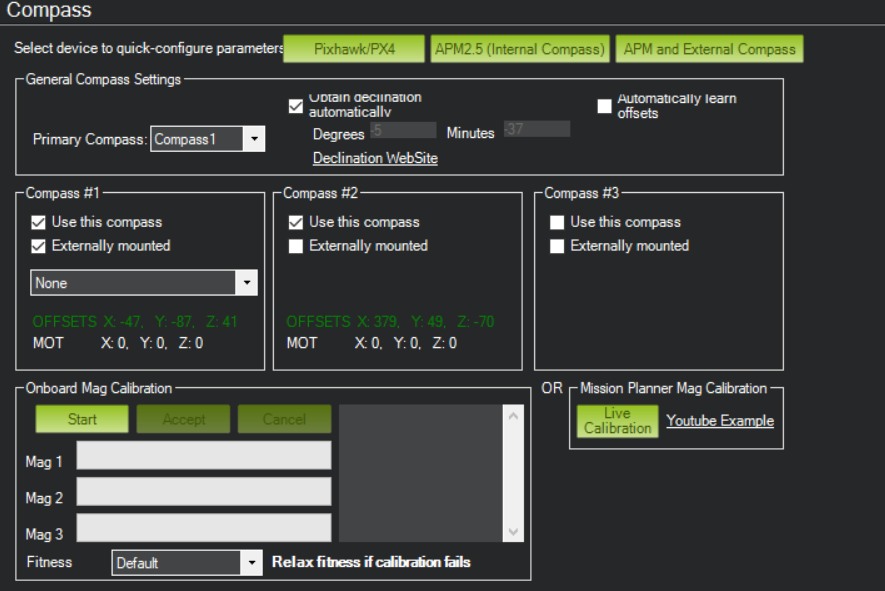
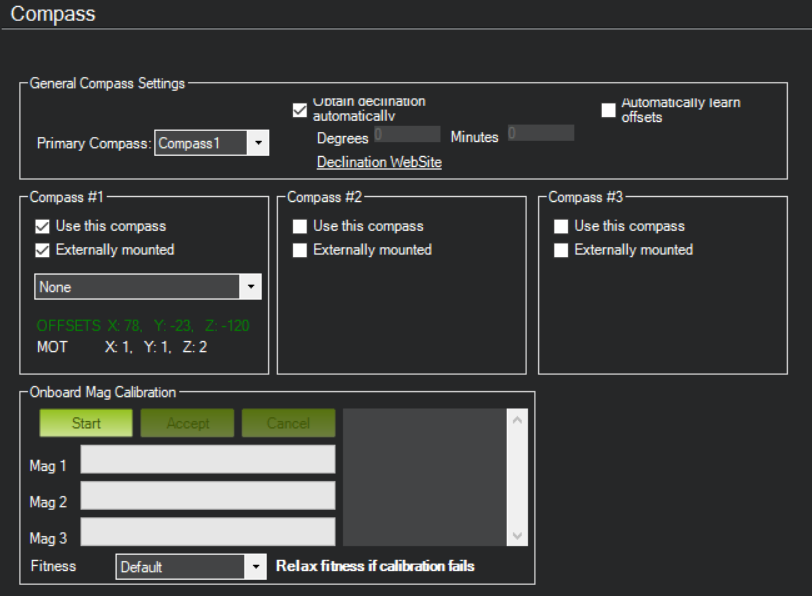
My compass settings are the same. Except I don’t use the internal one, in this unit I prefer to use only the external, due to magnetic interference in the internal. Do you think this can influence this problem?
I’ve activated and calibrated the internal compass (although I don’t understand how this could affect this problem). The existing mission of the FC has also been erased. The problem persists.
On the other hand, I noticed something else. As always, when I boot up the copter, it takes a few seconds to do a GPS fix. In these first instants in which the drone does not have GPS fix the value of ter_pend is zero and the drone can be armed without problem in a flight mode that does not require GPS, ej: AltHold. But as soon as the GPS receives enough satellites and makes 3D fix the ter_pend value jumps to 336 and the prearm message appears again.
This is what I don’t understand, because in the computer I have this terrain data and in other drones it works correctly. Furthermore, I have tried this drone with MP installed in other different computers and the result is the same, ter_pend equal to 336 when GPS 3D fix is obtained.
Yeah, I mean another copter with the same FC, GPS, firmware and configuration, almost clones. The FC is a Cube with the mini carrier board and the GPS is the Here 1. I might try changing some of the hardware to see if it makes a difference.
And yes, as I said in my first post, if I set the TERRAIN_FOLLOW parameter to 0 the problem is solved. But I would like to be able to solve it without having to lose this functionality.