Hi Josep,
For the Ardusimplelite, does it also support standalone & SSR correction ?
Hi Josep,
For the Ardusimplelite, does it also support standalone & SSR correction ?
Hello Mirko,
Right now and as far as I know, Pixhawk doesn’t support the moving baseline functionality, although is relatively easy to implement for the developers.
The heading accuracy can be defined as:
heading_accuracy = atan(2/distance), where distance is the distance between antennas in cm.
30cm: 3.8deg
1m: 1.14deg
10m: 0.11deg
…
This is an approximation, but the final numbers should be the same order of magnitude.
simpleRTK2Blite will support standalone operation + RTCM corrections.
SSR corrections will be supported in a future firmware release by u-blox (no dates available yet).
Hello everyone,
I need your help to list the cables and connectors used by the most common autopilots.
Pixhawk 4 uses JST-GH male-male 6 pin not-crossed cable.
What about other autopilots?
Thanks,
Josep
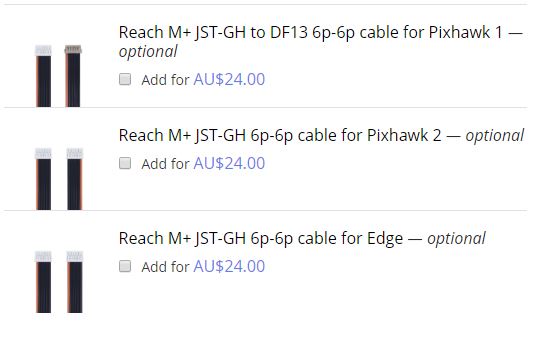
This is what I can find. Anyone else can help with this ?
Another question I have is that how Ardusimplelite connects with Internet to receive NTRIP corrects when it is moving on the vehicle ? I understand it can connect with Internet using USB cable and a laptop, but when it’s moving on the vehicle, I don’t think it is suitable to still use the USB cable
The ntrip corrections are passed up to the vehicle over mavlink from the gcs - so you need a telemetry datalink.
It would be possible to do it directly on the vehicle if the vehicle has a companion computer and 3/4/5G internet link, but that’s more complex than most people need or want
@Mirko_Zhou thanks for the cable information!
Apart from the options mentioned by @james_pattison, you can also use a dedicated radio link only for receiving corrections.
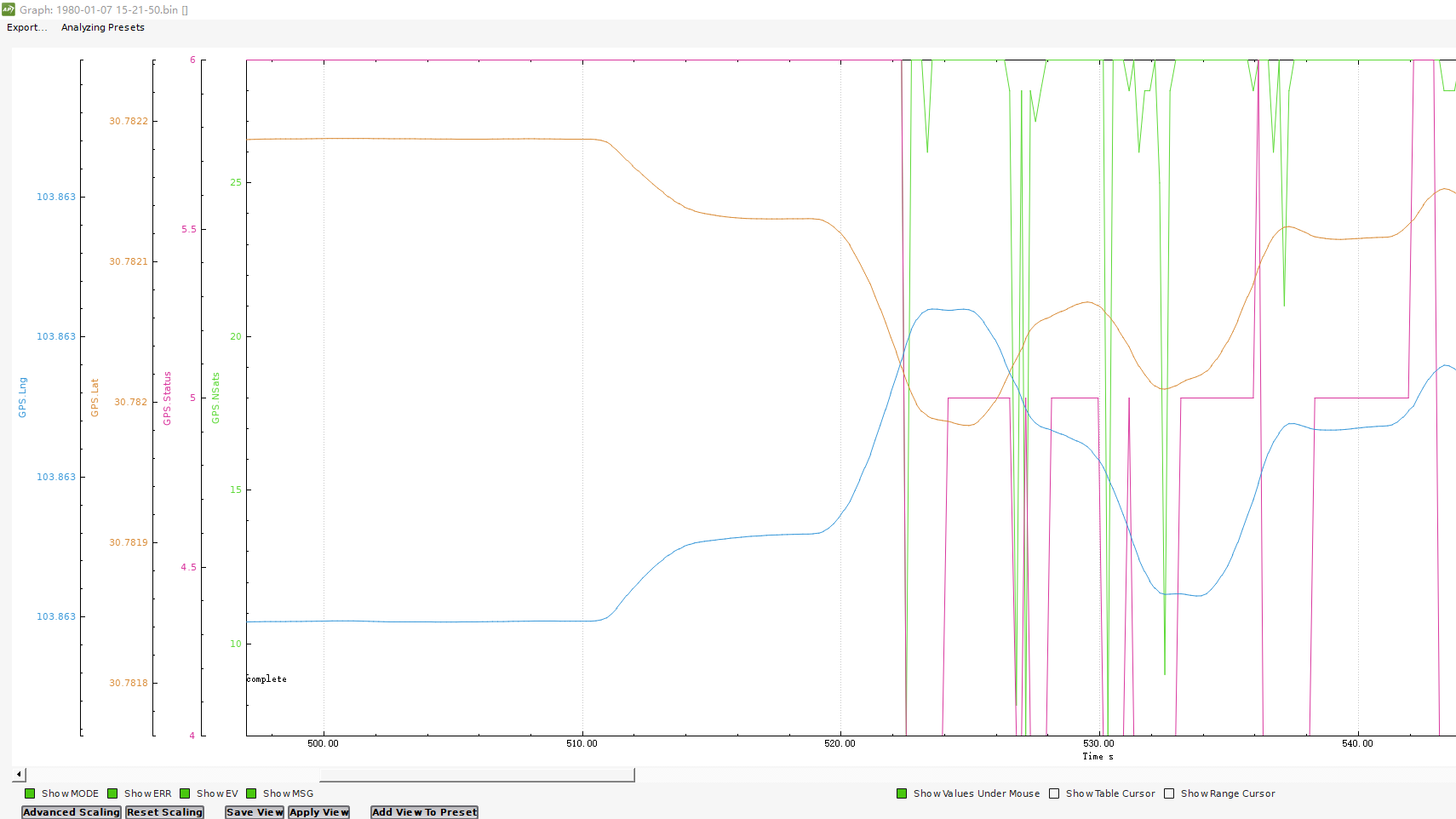
F9p RTK fixed is unstable, especially when braking suddenly, satellite is lost and positioning status is lost. But height and location data seem to be continuous.
I have some setting suggestions for you. In ucenter under nav5 - change your elevation mask to 15 -13 degrees, set the SNR value to 35-40db. You do not need more than 13-18 sv’s for a good RTK fix. If you are in harsh GPS environments use the slightly lower settings. In the open stay with 15 deg & 40db SNR.
If your signals are low in the sky, they are too weak to use reliably.
When you pitch your vehicle the ground plane will also effectively cut off part of the sky causing a loss of lock.
You may also have a radio issue. I never see my status drop to 4.
thanks very much, i’ll have a try tomorrow.
test log file. could you have a look on it?
thanks, i’ll try your settings
Personally, I think the offset is lost in the noise – as long as it’s always the same.
Hi I am getting 30-60 cm accuracy with F9P in photogrammetry in Agisoft Metashape. Photos are geotagged in Mission Planner and time of shot is synchronized by hotshoe form Sony a7r2 on Gremsy t3v2 to Cube Orange. During flight I get corrections form NTRIP by Mission Planner and RFD868 Mhz telemetry. In Mission Planner I always get RTKFIX. Is that normal ? How can I get better results with better accuracy?
The CAM messages you’re probably extracting are rounded to the nearest GNSS timestamp. You’re probably collecting at 5Hz, so that can easily be 30-60cm due to the timing. The feature has been requested to make the timestamps more meaningful, but for now, the current solution is to use a standalone device like an Emlid Reach M2 to do the tagging.
Here’s what I’ve requested long ago to help you get better accuracy.
Yeah, I have only asked for mission planner and ardu stack for the more accurate position fixes, what 2, 3 years ago? STILL not implemented???
Have you tested ArduCopter 4.4.0-dev? It has a lot more precision, probably all the precision you need.
But the timing (lags and delays) still could use some improvement.