Olli, this undertaking of yours might be helpful for people who are starting with UAVCAN, even if they are not hobbyists. Would you care to announce it on the UAVCAN mailing list?
Thanks 
Olli, this undertaking of yours might be helpful for people who are starting with UAVCAN, even if they are not hobbyists. Would you care to announce it on the UAVCAN mailing list?
Thanks
step by step … towards completion 
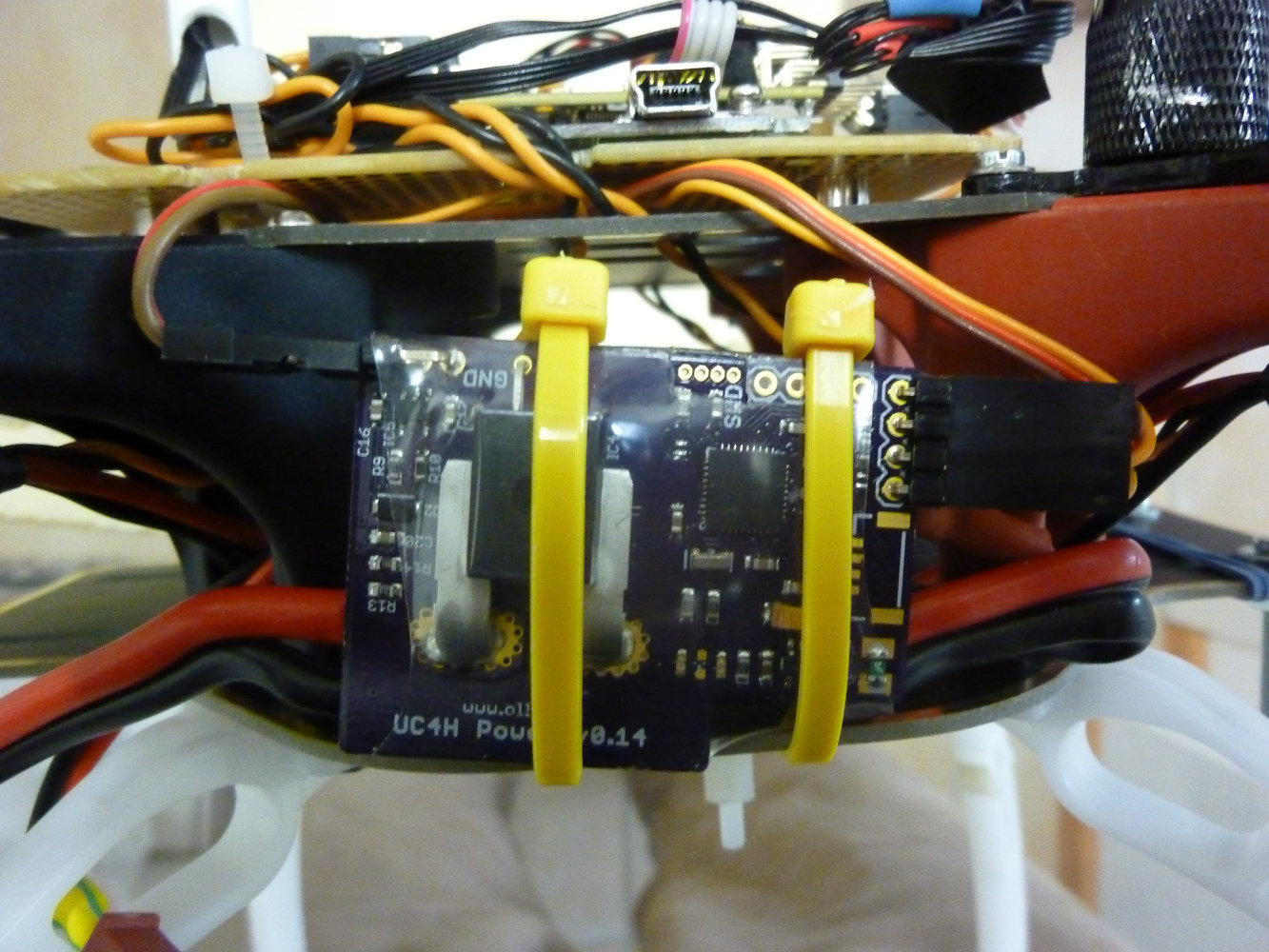
I today did a test flight with my uc4h power brick, and - not unexpected - no issues with it.
For me that’s actually a big step, since I was shying away for quite some time from doing my own switching regulators, for all the problems one may encounter here. But it seems I did that carefully enough. I did some range test, not very professional admittedly, but as good as I could, and I could not detect any negative effect of the uc4h power brick.
The current AC3.6-dev master doesn’t support the CircuitStatus UAVCAN message, but there is a PR by EShamaev (https://github.com/ArduPilot/ardupilot/pull/6527). So, yesterday, I downloaded the master and added the changes of that PR myself. Surprisingly enough, the compile did work out. So, I’ve loaded that firmware, and it works nicely, I had no problems with getting the flight controller to recognize the UAVCAN messages emitted by the uc4h power brick. Nice job, EShamaev. Not sure why UAVCAN development seems to be on hold since so many weeks.
Here the setup:
Here the flight log:
www.OlliW.eu//drop/apm/AUAVX2-canunit-beta36r00103-flight-w-uc4h-gpsmag-powerbrick-2017-08-13-13-38-08.bin
I did even a bit more. I’m not happy with using CircuitStatus, IMHO that’s conceptionally a bit inconsistent - my reasoning is found in the mentioned PR. So, I’ve added a new message GenericBatteryInfo to both the ArduCopter code and the uc4h power brick code. Cool enough, also that worked very well!
(I found some general issue, https://github.com/ArduPilot/ardupilot/issues/6762)
Of course, needless to mention, the GPS and magnetometer were again a uc4h gpsmag node. I in fact had more than a half dozen flights with it now, and have not encountered a single issue. So, I guess, one slowly can start to think about labeling the uc4h nodes as “does work”. 
The next step will of course be to add UAVCAN - STorM32 support, but I have feeling that this is not going to be as simple as adding the GenericBatteryInfo message LOL. Let’s see.
Cheers, Olli
I’m not sure that’s of interest (I’m a bit entertaining myself here LOL), but just in case:
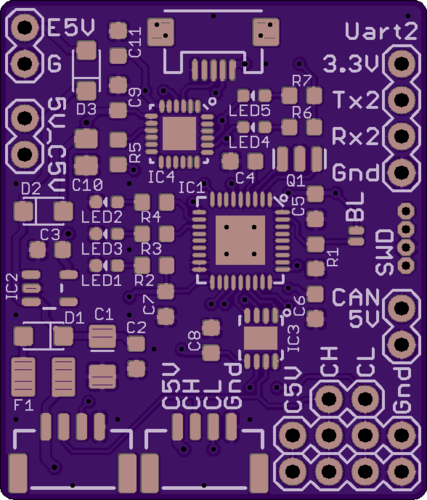
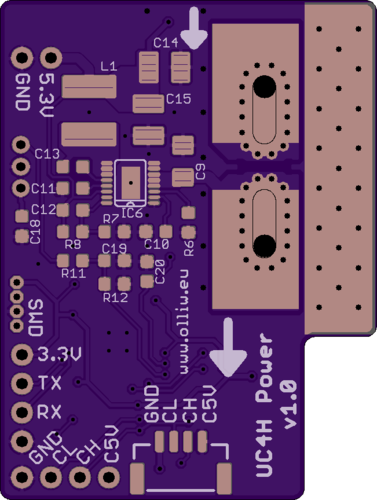
I’ve reworked the pcb layouts for the SLCAN adpater, gpsmag node, and power brick, removing few tiny bugs and making the latter two slightly smaller and “better”. I’m going to order them the next days, but I of course could order more of them. So:
In case anyone wants a pcb, pl leave a note.
This are the current v1.0 versions of the boards.
uc4h gpsmag node:
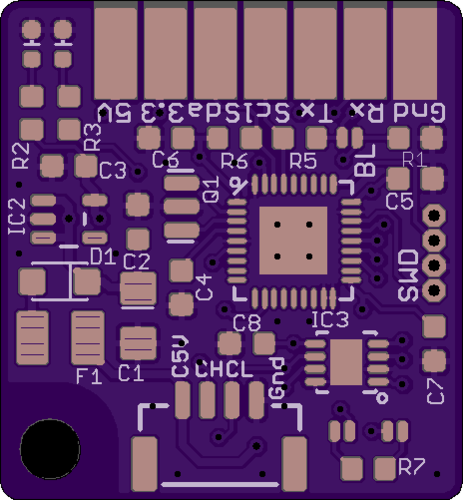
uc4h SLCAN adapter:
uc4h power brick:
Great job olliw !
I think that it can be very useful because I2C bus can have several problems .
Thx, sir.
I think it now went far beyond I2C. I actually like the power brick most, with all it’s innovs it became the brick I wanted. Already now I can’t imagine how I could have lived without it
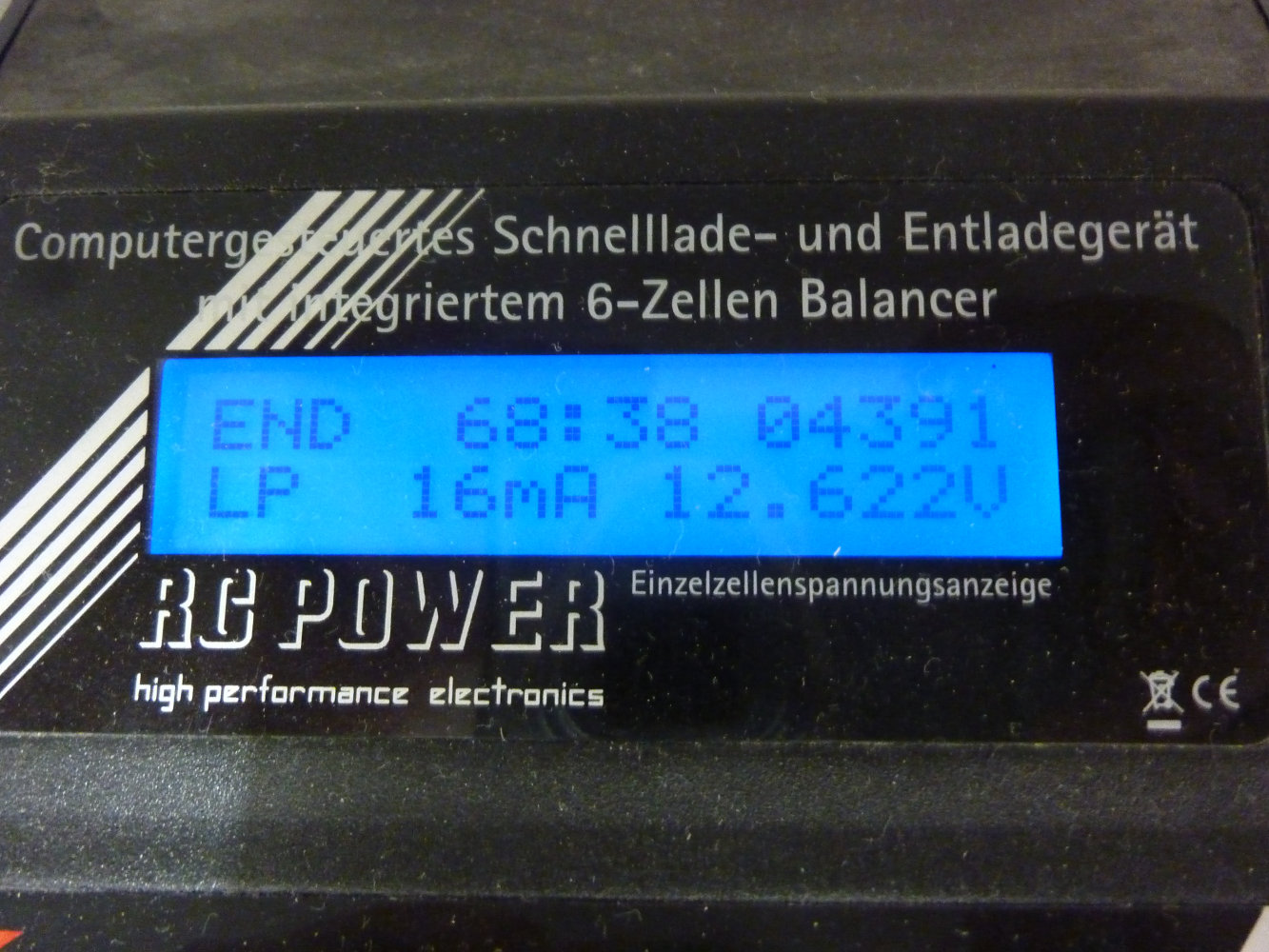
I have to show this, to demonstrate the point (E) Precise Charge Estimation of the uc4h power brick
(and I guess implicitly of the importance of (D) LDO stabilized power for the current Hall sensor):
I did a “long time” test, where I let the copter hover in poshold until the battery ran below ca. 20%, just for the sake of doing it. I used a freshly charged battery, and after landing charged it fully.
the u4ch power brick recorded a charge of 4336 mAh (see the log below)
my charger shows a charge of 4391 mAh
so, that’s accurate to better than 1.5% !!!
Note that this is without any calibration of any sort! The only thing I did is to take values from the ACS770’s datasheet and values from the electric scheme of the power brick to calculate conversion factors.
How cool is that. It’s definitely so much better than anything I’ve got with my 3DR-type power bricks, even with calibrating them. An accuracy of 1.5% in fact sounds to good to be true, but that’s a truthful report of what I just got.
Considering the error sources in the system (accuracy of the ACS770, accuracy of resistances, accuracy of LDO, accuracy of charger), the observed 1.5% is in fact somewhat fortunate, several % are however very realistic.
log file:
www.olliw.eu/drop/apm/AUAVX2-canunit-beta36r00103-flight-w-uc4h-gpsmag-powerbrick-2017-08-15-14-45-02.bin
charger result:
yesterday - unintendedly - I got another reliable measurement point
I did an autotune, and since one can expect this to take a bit longer I started with a freshly charged battery (that’s important to get a reasonable data point). I however ended up doing 4 flights with that battery (=power downs in between), (1) autotune flight, (2) brief control flight with the new PIDs, (3) I went home and briefly tested again, (4) my neighbor’s cousin wished to see it flying too, so, another brief flight. From the logs I read off these discharges:
1: 3138, 2: 461.25, 3: 385.25, 4: 576.5 = 4561 mAh total
My charger told me a recharge of: 4652 mAh
so, that’s an accuracy of 2.0%
as said before, it’s unclear how coincidental this is, I certainly don’t know e.g. how accurate the charger is, etc. pp., but I find it funny that the numbers add up to something reasonable even though the battery has been disconnected repeatedly.
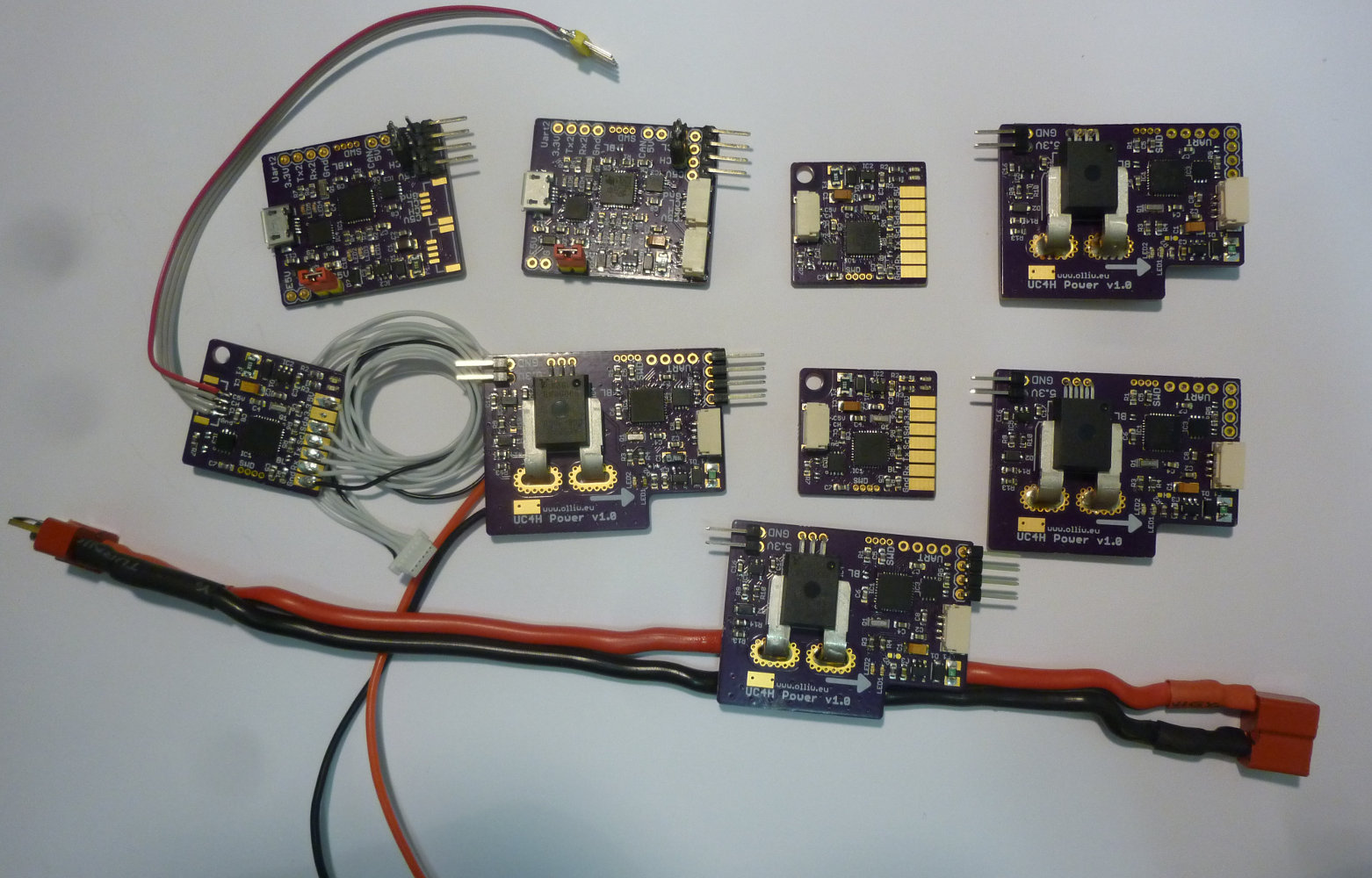
finally the newly designed v1.0 PCBs have arrived and I’ve build a couple of them
below a photo of all world-wide existing v1.0 uc4h modules 
so far all looks good, they all have passed the bench tests and all pcbs are like I wanted
tomorrow I’ll plan to test-fly mine, to have the final proof
(I guess I will start a new thread once some “data” comes in for them… )
cheers, Olli
I did a couple of test flights today, and the modules appear to work great, could not see any issue with them
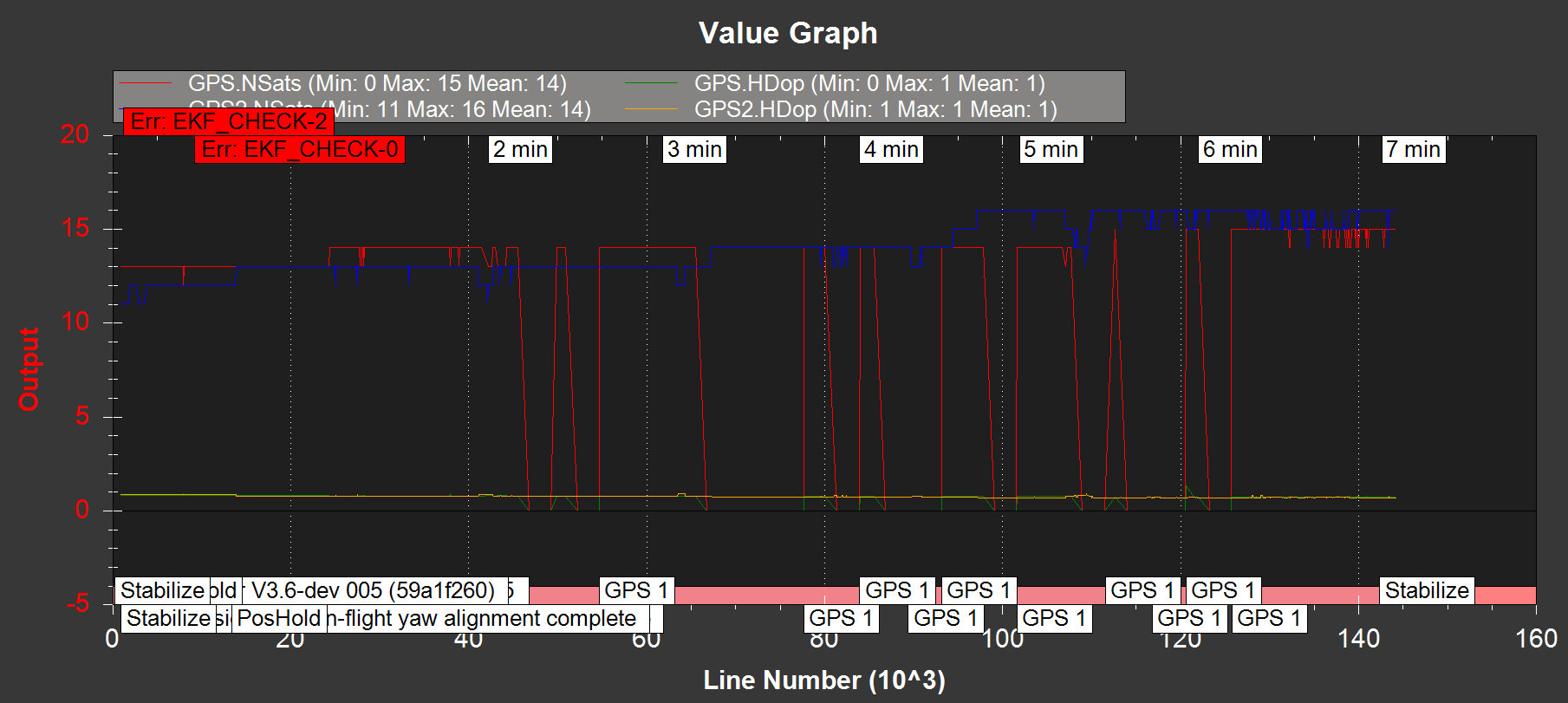
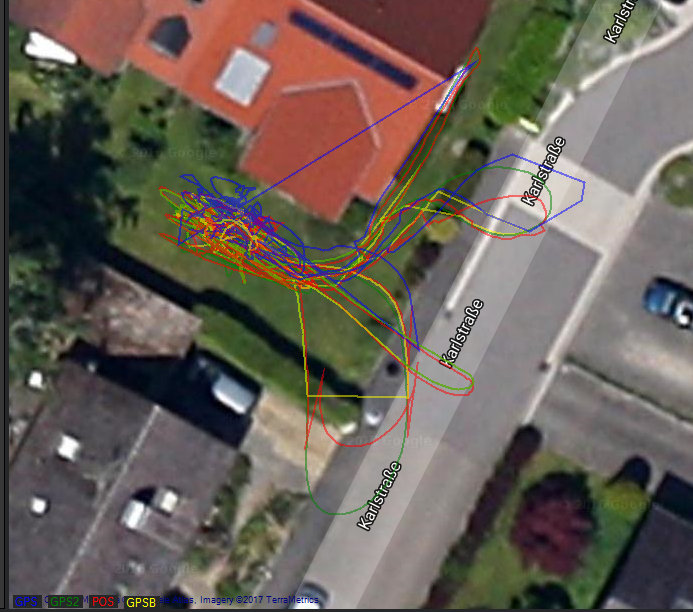
even though I’m largely talking to my self here, I want to share this part of the story, however, since I think it’s a great example of what two GPS units can do:
In these tests I had an issue with my copter, in that the standard ublox gps, connected as usual to a serial, had serious outages in the first flights. I can’t remember having seen that before, and I’m absolutely sure that this was because of the wiring of that GPS - I still use the crappy wires with which it came delivered… and rattling on them made the issue go away. Anyway, the good message, the uc4h GPS did not had any issue at all, and ArduPilot happily went along. In fact, and this is now really the point, I didn’t notice ANYTHING of that during the flights, the flights felt just normal! I saw that only afterwards in the logs, and was in fact “surprised”, you know, I didn’t had noticed anything before … I think we can safely assume that if I would not have had the uc4h gps on-board, I would have noticed immediately, in one way or the other 
Well, you of course could say, “Get your dammed wiring right”, and you are of course right, but … I’m glad I didn’t had an incident 
Great stuff this GPS blending thing!
In terms of data it looks like this:
(in the map please notice that the green line is GPS2 or the uc4h gps, while you can nicely see the outages of GPS1 in the blue line)
In the lower center of the image when the blended (yellow) averages the two gps ,which have drifted apart a considerable distance, the blended “short-cut” track is about half way between the two GPS. Did you experience any abrupt changes in flight or did it smoothly take the blended path?
Cheers
good question, I too wondered about what this is supposed to mean, as well as the behavior of the red line
such cases are also visible in the top right loop
no idea
no, I did not notice ANYTHING of that, the flight was perfectly smooth, as usual, no jumps, and certainly not by 3 meters
this might not be so in hover, in the very first of today’s flights the copter was quite jumpy in hover, maybe I should dig out this log too
but at the end of the day, I guess I’m too lazy, the copter now finally got new wires for gps1, and all that is totally gone and is as before, I should have replaced them long ago … too lazy (or too busy)
edit: we should not forget that this is on master, which is not yet perfect
Well it also indicates well for the blended GPS code since previously with two GPS, that did not agree, the aircraft could abruptly change when Arducopter switched to the second GPS.
Hello Pavel ,
With Arduplane 3.8.2 I am not able to have the Zubax working, I still receive a “no gps” status from Mission Planner.
I have configure the node_id and set “gps_type” to 9 .
BRD_CAN_ENABLE and GND_PRIMARY parameters do not exist anymore.
A new CAN category is now present.
How can be configured the Zubax with Arduplane 3.8.2 ?
UPDATE: Setting CAN_P1_DRIVER to 1 makes the GPS to work ![]()
How to configure the Barometer and the Compass with Arduplane 3.8.2 ?
@olliw42 first off, I’d like to say how impressed I am by what you’ve done with UAVCAN for hobbyists! I didn’t know about this discussion until it was raised in the weekly dev call today, and I’m kicking myself for not paying closer attention and seeing it previously given it has been going on for many months. I’m really amazed at your persistence and the fantastic progress you’ve made.
You had a Q on the dev call topic about custom DSDL and what to do about it. I think the answer depends on the nature of the DSDL. If the DSDL is for messages that @Pavel_Kirienko is happy to consider for upstream acceptance then going via Pavel and getting it upstream is best. If the DSDL is not something that Pavel wants to consider for upstream but we do want to accept it for ArduPilot then I think it should go into the ArduPilot git tree.
Let’s take the example of DSDL for I2C-over-UAVCAN or serial-over-UAVCAN messages. Pavel has made it clear that he doesn’t want that in upstream UAVCAN, but I think it is something we should have in ArduPilot (if only to make hobbyist and prototyping easier), so the DSDL for that should be in the ArduPilot git tree. I think putting it in a libraries/AP_UAVCAN/DSDL directory in the ArduPilot git tree would make sense. @EShamaev, would you be happy with that?
One thing I’d really like to see with your work @olliw42 is to create a github fork of ArduPilot with your work. @james_pattison pointed out on the dev call that you do have it in a github repo here:
but that isn’t a fork of the ArduPilot git tree, so we can’t use normal git tools to merge, rebase, cherry-pick etc. We’d have to manually edit files to track changes. Would you be willing to redo your work as a normal github fork with your changes on top?
Perhaps we should add a small sample DSDL message in libraries/AP_UAVCAN/DSDL to act as an initial example? Maybe a simple message with a string that gets displayed as a MAVLlink STATUSTEXT? Just something to get started with our project specific DSDL, and get the build rules right and tested.
Cheers, Tridge
they should be working if you set CAN_P1_DRIVER. I fly my ranger with a Zubax1 and its working for me. Do you not see them?
Hey Tridge,
thanks for chiming in and spending your precious time on this.
As regards my persistence you should not be impressed; it is limited. It is actually essentially exhausted, and I plan to sell off my pixXXX’s (except one). I have aimed at too high hanging fruits here and am too dependent on others for my lack of skills; the two topics you address are two examples :).
DSDLs: At the end of the day I would not care where or by whom they are placed. I just strongly feel that the current situation, where I had to fake them into the standard DSDL section (since I didn’t know better), isn’t the proper way. I also note that the concept of “vendor specific data types” is part of the UAVCAN concept. To me that implies that it doesn’t have to be either “accepted by Pavel” or “go into the ArduPilot tree”, it also could be just a folder which anyone who makes a fork for her/himself can place her/his messages. An example to explain that could be the UserCode,UserVariables files. You offered a place for anyone to put their stuff, but whatever anyone puts in there rarely goes into the ArduPilot tree or even higher upstream.
In the git issue I suggested a folder structure like (taking your suggested folder as base):
libraries/AP_UAVCAN/DSDL/ArduPilot
libraries/AP_UAVCAN/DSDL/ThisAreYourPrivateDSDLs
libraries/AP_UAVCAN/DSDL/ThisAreMyPrivateDSDLs
libraries/AP_UAVCAN/DSDL/…
this would only require adapting the build system such that it also dsdl-compiles everything it finds in libraries/AP_UAVCAN/DSDL/.
GIT: Well, that’s a problem. I’ve explained that already to james pattison: I’m not using git and find it difficult enough to be extremely reluctant to learn it. I in fact had made several attempts to read and comprehend the AP docs, but every time got lost half-ways in the middle and stopped. I don’t need it for what I’m doing, and I don’t find it a comfortable tool. I’m a hobbyist. The set of tools you guys use is above my level.
(you may find it not too difficult to find the changes though, searching for //OW does it)
Cheers, Olli
Hello tridge and thanks for replying.
I suspect that yes in Arduplane 3.8.2 both baro and compass work since I was able to calibrate an external compass .
A doubt remains about the baro , is baro 0 always the Pixhawk baro ?
A message during Pixhawk boot with “CAN baro detected” and “CAN compass detected” would help user .
Recently I tried my second Zubax 2 with Arducopter 3.5.3 and had problems.
First I notice that the CAN configuration is quite different from Arduplane, you have to go in BRD parameters to allow CAN operations , this make things a bit harder for the user.
I loose quite time with a defective CAN cable (will order today some JST GHR-04V-S connector and do my own cables) and then discover that both Compass and I suspect baro do not work.
External compass ID is a weird number and even if apparently it is detected, no way for me to get it calibrated.
The baro of my Pixhawk is defective , get always “bad baro health” message, so I selected with GND parameter the Zubax baro, baro 1, but still receive the “bad baro health” .
Where can I see if the Zubax baro is working ?
In Zubax website , the documentation to explain how to use it with recent version of Arduplane and Arducopter is obsolete, it would be fair if Pavel would update it , Zubax is a great product , it deserve a great documentation.
These are bitter words Olli …
I have a great admiration for your work and your skills that I fiercely envy, your work with UAVCAN for hobbiest is a great example of Open Source meaning , thanks!
they are not bitter but true 
well, if you consider the truth bitter, then … … this becomes philosophical hihi
@lucamax For a reference, this is where the docs are posted at: https://kb.zubax.com/display/MAINKB/Using+Zubax+GNSS+with+ArduPilot+autopilots
I suppose you were referring to that page in your post. Yes indeed, these instructions may be a bit outdated. I am considering to drop them completely in favor of the ArduPilot’s wiki. Would someone please volunteer to draft up an updated setup manual on the ArduPilot’s wiki? I can’t do that myself because I don’t currently use ArduPilot (sorry everyone).