hey Folks
I did some more flights these days, and as a result have just decided to officially declare the UC4H project as “working”. 
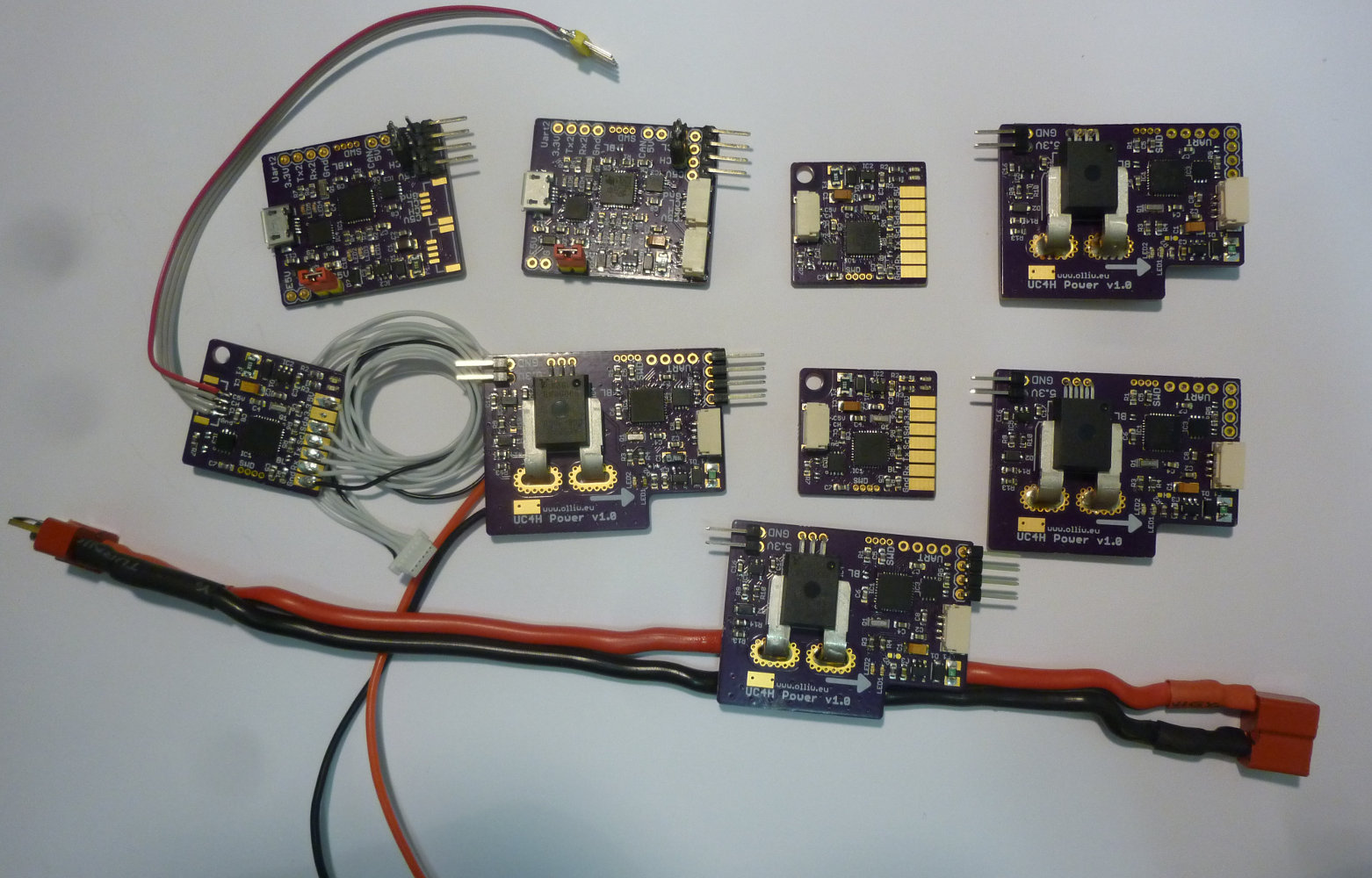
The UC4H nodes are working well. There are of course little things which still could be improved and changed, but overall I’m very satisfied. It’s working and I very much like my UC4H-ized copter, it is more reliable than ever before. In this sense the project has accomplished its goals.
I’d like to leave some comments on its current applicability:
In principle, the UC4H nodes can be used in any UAVCAN network. That’s the idea of UAVCAN. However, in practice the options boil down to ArduPilot, with these additional restrictions:
(to the best of my knowledge! please correct me where I am wrong)
ArduPilot master:
You need to flash at minimum from master. The “new” UAVCAN support is only in master so far. As much as I know this holds true for both Copter and Plane. However, master only supports the GPS and magnetometer UAVCAN messages, but not the UC4H power brick. With ArduPilot master you can use the UC4H gps-magnetometer node.
BetaCopter 3.6dev:
This is a fork of ArduCopter master of 12. Aug. 2017, and has compiled (and flight tested) binaries for v2 and v4 flight controllers. It has full support for the UC4H gps-magnetometer and UC4H power brick nodes (as well as for the STorM32 gimbal controller). Thus, if you want to make use of the full potential of the UC4H project, you want to flash BetaCopter3.6dev-v005 (binaries are here: https://github.com/olliw42/storm32bgc/tree/master/betacopter/betacopter36dev-v005/ArduCopter). The limitation is that it is only for Copter, and v2 or v4 flight controllers.
The UC4H SLCAN adapter is of course independent on any flight controller support, and also UAVCAN, and thus can be used in any CAN bus network.
I admit that I would have expected the project to attract more interest among hobbyists; I even thought it could evolve into a sustainable source of funding for ArduPilot LOL. But I’ve grossly misjudged that; I have failed to realize that CAN and UAVCAN in particular is pretty much unknown to them. It’s not on their plate (thx Mike for teaching me :)). However, I myself have benefited a lot. I have now a SLCAN adapter to work with CAN without having spent 80$ or more, and I never would have put a CAN transceiver onto a STorM32 board otherwise. Even if it would be for these side effects only, it was a great endeavor.
I’d like to close with saying a big thanks to all those who have supported this with answering my pesty questions, THX to EShamaev and Pavel! Especially Pavel!
Hopefully ArduPilot will tighten up its lose ends related to UAVCAN rather sooner than later. It would be cool to see the new UAVCAN environment become part of AC3.6.
Thx, and cheers,
Olli