Yes, I can tell you that my low battery warning is probably set too high (10.9V) for 3S. And the current put into the battery is around 3000mah out of 5000. What I’m thinking is to use a current low battery warning, not voltage. I calibrated the current sensor and it works well! The drone hovers on around 65% throttle! Now I ordered telemetry so I can see the amps used and calculate that more accurately compared to voltage!
If all your components are rated for 4s, then that would be the way to go. Get a good quality 4S battery. Tattu batteries are fine. They’ve worked well for me. You’ll have some setup to change, but you shouldn’t have to totally rebuild your quad. This way you’ll learn a few more things and save that money for the next one. (because there’s always a next one…)
What would I need to change in setup? I would expect to only change the battery capacity in arducopter settings and recalibrate the amp meter in the power module! Do I need to change anything else?
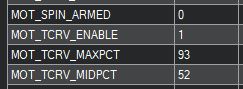
None of those parameters exist in the prehistoric version of Arducopter (3.2.1 probably) he is running on the obsolete APM… Here is the extent of the MOT parameters:
If you add the gimbal and camera to that configuration you will likely have stability problems due to lack of thrust headroom. And you won’t see any error messaging about it as you would with current versions of Ardupilot.
[quote=“Allister, post:24, topic:69659”]
If all your components are rated for 4s, then that would be the way to go. [/quote]
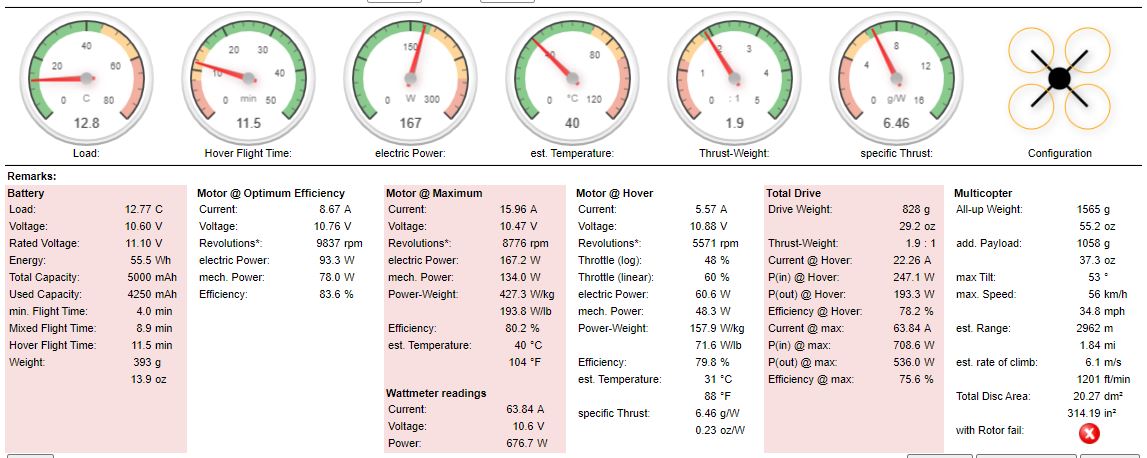
I have doubts whether these cheap 2212 motors can handle 10" props on 4S without getting too hot on such a heavy quad. If you want to try this, I would try 8" or 9" props first. Bus this would decrease efficiency. If you want to use this quad for filming, you will have to change the props anyway. What are your actual amps at full throttle?
It consumes around 60A on 3s now at full throttle! True, the motors even now get hot, it’s not that I can’t touch them, but they are very warm, I would even say hot!
Then I do not see a way to increase flight time with that setup. 4S would increase safety and motor efficiency at hover power (if it doesn’t destroy the motor) but decrease aerodynamic efficiency because of higher jet velocity and smaller prop.
I would predict, with your actual setup you could get 1-2 minutes by optimising your battery warning, maybe another minute by using a battery with higher engergy density and mabye some seconds with a better prop. For everything else you have to change more components.
Okay, let’s see the flight time with telemetry and accurate battery level with amp meter! I would probably not change to 4s due to reasons described above by both of you, rather I would just get a lighter battery that has the same power than my actual one!
On my F450 quad I’m using 3S 5000mAh 25C batteries, and I’m getting a max flight time of 18 minutes, but normally I don’t fly longer than 12 minutes, to stay safe and avoid torturing the battery. The drone weighs about 1200g complete with everything. That includes the battery, gimbal, camera, and a grabber. The motors are Readytosky 2212 KV920, the props are 10x4.5. The ESCs are Littlebee Spring 30A.
Current drain in hoovering flight is about 15-16A when the battery is fully charged, and rises as the battery voltage drops (constant power).
I intend to eventually build my own monocoque frame, and remove all the individual little boxes and housings, to save some weight.
The weight has a big impact on flight time, more than proportional, because more heavily loaded props also become less efficient. For the same reason you should NOT switch to smaller propellers!
I will not switch to smaller propellers of course, but when I will buy another battery I will buy not so heavy and with less C rating, 250A max current is too much for a drone, it only makes it heavier!
Thanks for the advice!
Advice on top of advice. Listen to Mr.1 and ignore everything dkemxr had to say. 3S is fine. I have a very similar setup and get 20-25mins with a 3s 6,000mAh battery. A couple additional thoughts: Most battery manufacturers lie about battery capacity. The best way to compare batteries is by weight. I don’t have the numbers in front of me, but you can calculate mAh/gram and this will tell you exactly what your battery capacity is. Discharge rate doesn’t matter either. Batteries today all have VERY high discharge rates. Based on this all batteries are the same - they probably all come from the same factory in china. There are no “better” batteries.
You mentioned “twitchy” behavior. That could be eating up battery life if the PIDs aren’t tuned right and the drone is fighting itself. When you land are any of the motors warmer than the others? That would be a sign. Forget going to 4s, you should get 20+ minutes out of a 3S setup.