Hello,
so the other day i was testing some missions with waypoints from mission planner and on the second test the drone came back to home nicely after telemetry fail safe was activated. On the third try after i changed the telemetry fail safe, i armed the drone through mission planner and then i pressed Do Action “Mission_start”, but two of the motors started spinning before i press yes on the warning message, luckily i pressed enter fast and the drone balanced immediatly without a crash. After this it continued the mission fine and didnt have any other issue in the next tries also. If anyone know why it might acted like this i would like to know cause i want to avoid any future accidents.
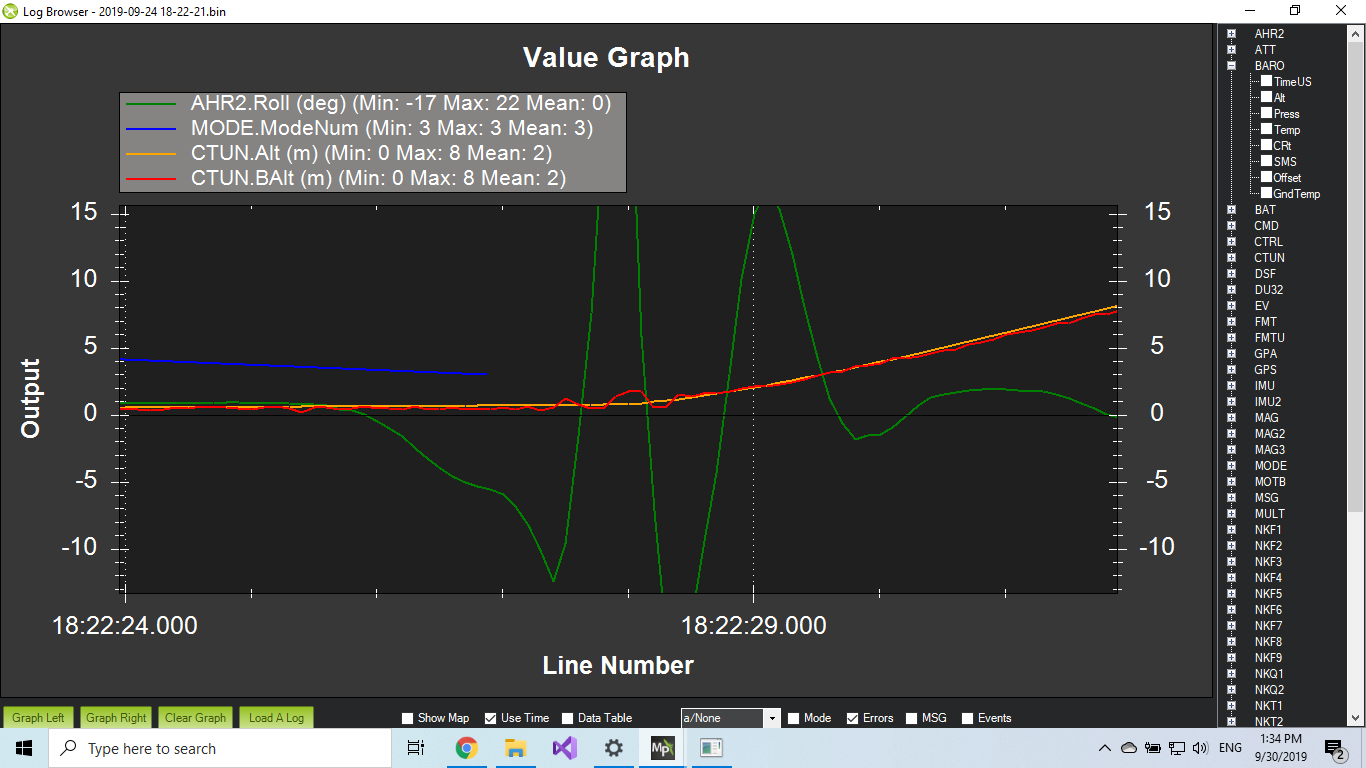
Here you can see the roll and the ellevation during the event.
Thank you !