I’ve trying to solve some problems with my F450 Chinese clone with no success. It fly correctly but suddenly comes into instability and seems it’s going to crash. I use Pixhawk from aliexpress and cheap motors and ESCs.
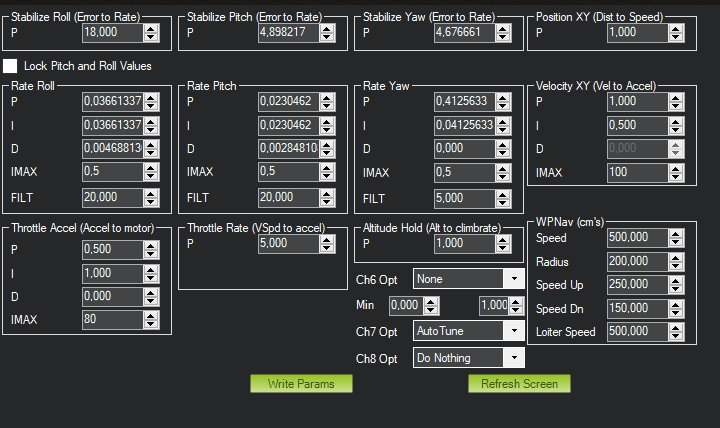
I tried autotune but results are worse. It is now very unstable.
RCOUT for motors 1 and 2 are always lower than for motors 3 and 4. Motors 1 and 2 are sometimes even almost shutdown.
I’ve noticed that arms 3 and 4 are slightly more flexible than 1 and 2.
amilcarlucas I’ve recalibrated the escs many times with the “all at the same time” method and I do not think this is the problem.
About unsync esc, to be honest I do not know what it means and how to detect that. I’ve done a quick search on google and still not clear to me. I will investigate it in deep, but if anybody can explain to me what are the symptoms and consequences of unsync esc and how to fix, I would be gratefully!
This happens when your centre of gravity is wrong. To keep the aircraft horizontal two motors have to work harder… I am not saying that is your problem though.
I did an autotune on a 600mm motor to motor aircraft and the resultat is brillant… Just saying this to say that if your aircraft is able to do do position hold, then autotune does a great job
If CG is the problem, Motors 1 & 3 (front heavy), motors 1 & 4 (Right side heavy), etc…, will work harder than the opposite pair. If diagonally opposite motors work hard, they are fighting the yaw induced by the not so straight motors, in this case 1&2.
clone 450 frame will sometimes have twisted arms. Can be corrected by placing Shim under the motor Screws.
By trial & error , and graphing RC Out 1-4 , till the lines overlap (in a perfect hover).
OR
Buy a new S500 frame.
you are flying normally and, for moment, the quad become to move crazy near out of control, some esc aren´t adecuate to some motors so you need to change them but first be shure that isn´t other the issue, the log indicates that is something relate with your harware, frame not enought rigid can give similar issues,
Something related your frame, motors , esc. Your hardware couldn"track the desired attitude, as soon I can I share graphic. First verify that all is well stiff on your ship, try to move arms if they are enought rigid
The arms and the whole frame are a little bit flexible, but with my little experience I think it is normal. I also want to do some testing for checking esc and motors unsyc issues, but I’m not sure how to do so I’m searching and learning on youtube.
I also think a good tuning will help. Do you think that the hardware can not track the desired attitude can be explained solely by bad PID tuning?