I am more leaning towards brushless as it needs to be professional level. So the question remains is Storm32 is a good choice or not. This is the only open source board I have seen so far.
Furthermore, i hate the fact that when it comes to Gimbals they are configured for specific camera types. I want to design one Universal system (offcourse keeping camera weight in mind) and provide inserts and holders for various camera types.
We can even turn this into a commercial solution (thinking out loud)
The level function already exists and works with servos: https://ardupilot.org/plane/docs/common-camera-gimbal.html#camera-gimbal-with-servos
I’ve used this with Copter and it was very easy to set up and tune a FPV camera pitch servo to maintain the desired forward looking angle while the craft pitched (and rolled) for maneuvering.
Of course the advantage with a gimbal control board is the independence from the FC and smoother brushless motors.
I guess it depends if a suitable servo will give smooth enough operation.
Think of a plane flying at 5 m/s in gusty wind and may get cross wind as well.
My plane is SkyWalker X8 with Scorpion motor. I am hoping it will slice through the air like a knife through a butter but flight may still get bumpy time to time.
You are taking 1000’s of shots which are GEO tagged using Seagull system.
I don’t think servos are used in decent gimbal since maybe 5-6 years
A 2020 decent solution for a plane facing down gimbal would involve 2 axis, brushless motors with encoders, storm32 or Alexmos. This is the bare minimum for a decent solution.
If you get exotic you can add coreless (low cogging motors) and vectornav sensors to make it better. If you plan to sell it for business do not forget to take in account people will want RTK geo reference to the pics.
So to make it short, i think you are trying to reinvent the wheel with ancient tech, you are i would say 7-8 years late to the party
We, for a living, take pics of 2mm serials on thousands of photovoltaics panels with a facing down Sony A7R IV camera, so i guess i know what i am talking about.
p.s. Gimbals are configured for specific cameras because they need to be balanced and with different cameras is very difficult to have a “one that fits all” solution.
p.p.s www.uavskies.com shows a strange page, maybe your web server has probs.
@Corrado_Steri I never suggested a servo based solution, it was just a suggestion (by others, read original post) as I do not see any off the shelf 2 axis, brush-less motor gimbals for planes unless you can show me one.
There is no such thing as late in the game “or” reinventing the wheels (not applicable here). there is always room for improvement and technology always evolves.
Also, a Universal Gimbals for multiple cameras is possible. We are looking into it.
What is your company do? do you have a web site.
We don’t have a web site at this point as we strictly do contracts for federal govt.
Ah ok understand, contracts for federals.
We are a small company, not working for federals, www.msh-uav.com
We build and design our UAV and gimbals, using AP and Basecam.
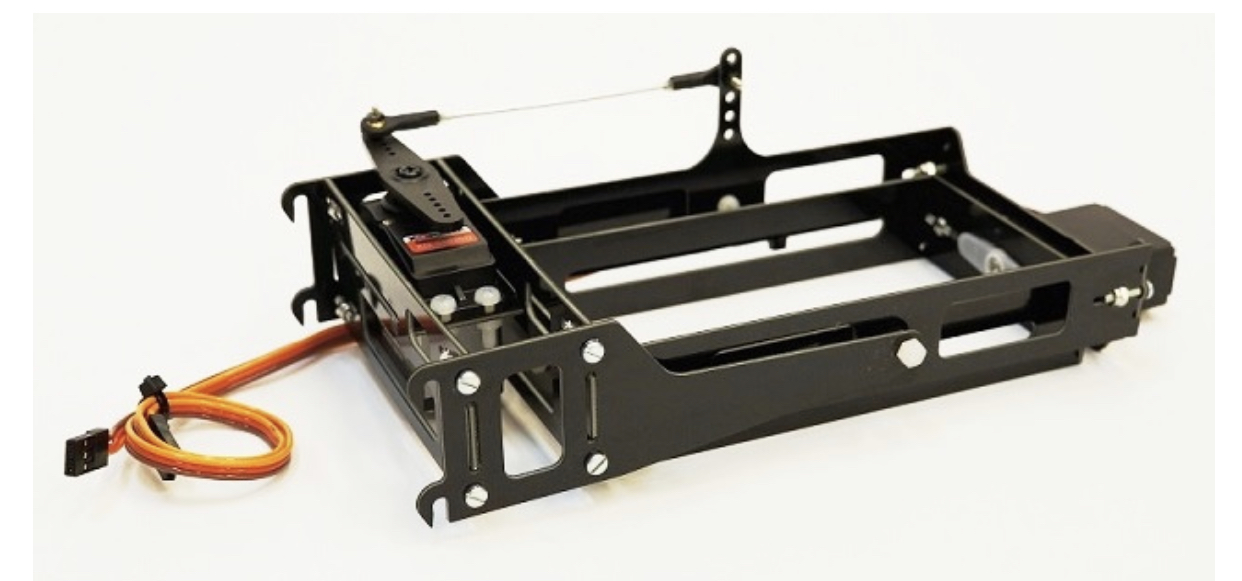
For plane belly gimbal, frame for the camera is not really the important thing, what is important is the electronics to drive it and quality of motors and external sensor. The frame to hold it is, well, is just a frame.
If you plan on doing one and sell it take in consideration a gimbal electronic that can run scripts (very usefull for very high resolution pics 0,1mm/pixel), and RTK on board for gps precision.
We built 2 facing down gimbals in the last months for specific jobs, one was carrying an hasselblad h6d-100c 100mpix and the other a sony a7r iv 61mpix, very different cameras and very difficult to accomodate them in the same frame, unless frame is bigger than needed.
Also take in consideration that autofocus often is not usable to shoot at a high rate so you have to integrate radio phocus and it is very difficult to accomodate it on different cameras on same frame.
All that being said, if you are a big company that works with federals, you probably have resources to do a better job than we did, so if you ever come to market with a revolutionary good frame we will be first in line to buy one
 :)
:)