Hi,
I read some post about similar problem that mine, but i could not find solution.
I have problem with turning over copter during take off. I’m not sure, but it doesn’t looks like all the time it flips on the same edge.
For beginning I’ll past my bin DataFlash log: https://drive.google.com/open?id=1Kbrp_2khdQ0pYFRPXc3YXe0ndtaHQvoF
Now some information about costruction. So it’s 4 motor copter in X orientation. Pixhawk 2.4.8 (white) with ArduCopter 3.6.8. Low KVM (680) Multistar with big battery 20000mah. I’ve calculated on https://www.ecalc.ch/ that drone should flight anout 20-25 min and have some power reserve.
Until first take off try I was suprised that copter don’t move up no one cm. So I’ve checked propellers and motor and I’ve discovered that I’ve bad mounted proppelers or wrong motor direction. After few minutes I was sure that proppelers are good mounted, but motor spin are reversed (CCW was CW and CW was CCW). So i decide to change wiring ESC to Pixhawk and change propellers.
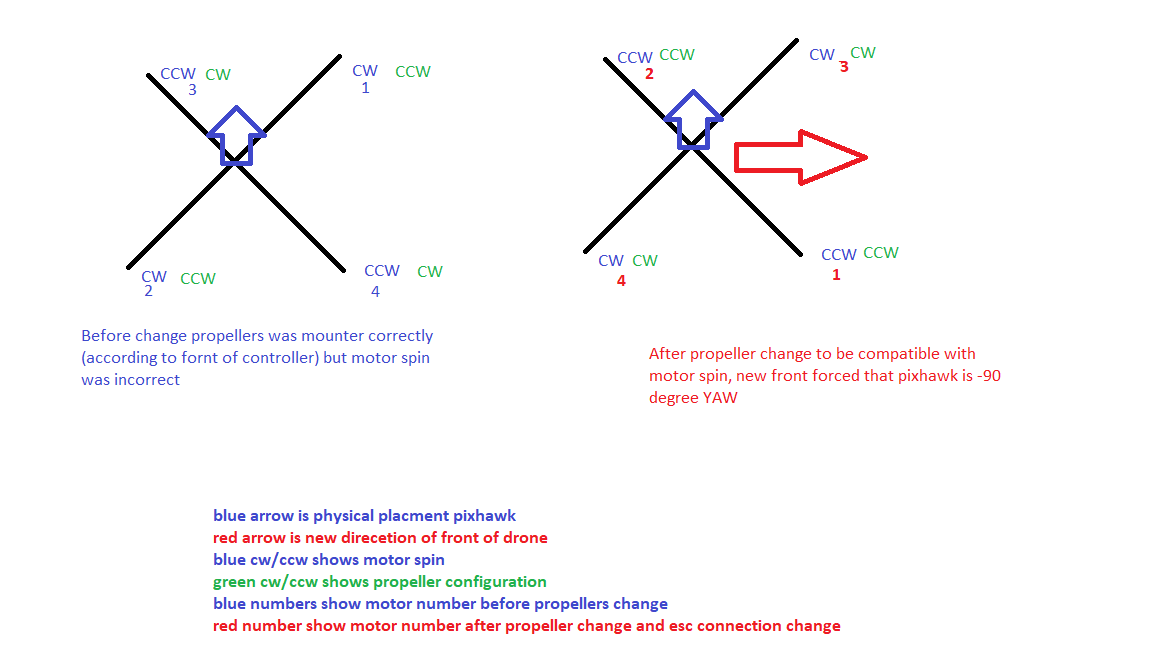
Side effect was new orientation of pixhawk. In my calculation was -90 (previous front was on new left) so i’ve changed AHRS_CUSTOM_YAW. Af course I could change pixhawk physical location but lack of stuff stopped me.
I’m not sure it’s important but I have ESC with BLHELI Dshot 150 configuration and averything configured as is described here: http://ardupilot.org/copter/docs/common-dshot.html (except blue wiring from telemetry and pass-thru) I did one change, i’ve setted SERVOn_TRIM (for n: 9-12) to 1100 because of arming failsafe error:
PreArm: RCn minimum is greater than trim
My configruration: parameter.param (15.6 KB)
I’m not newbie as copter pilot, but new in Ardupilot and I cannot understand what’s going wrong and why always during take off probe copter is turning over.
Can You please look at logs and tell my what’s going?