Whats the best way to setup up a Turbine to enable the use of the governor and be able to take the throttle High to initiate the start sequence?
@Ferrosan is probably the most experienced when it comes to this.
You want to use the internal governor?
@bnsgeyer Yes. I have several Gas Heli’s working with the Internal Governor and I just returned one of the Turbines back in service after some engine work was completed. I’ve been using RCpassthrough and using a knob on the transmitter to control throttle, but this is not ideal as it requires constant attention especially on “lift off” and “touch down”.
Since I have your ear, the internal governor will be changing some going from 4.1 to 4.2. The new governor will hold rotor speed much better through environmental condition changes and you are able to change rotor speed by a couple hundred RPM and not have to re-tune the parameters.
So I just want to warn you that you will have to retune the governor for 4.2.
Thanks for letting me know that.
Also, one possible solution for turbines would be to be able to select the governor mode using a switch on the transmitter, “Manual” to initiate start and then switch to “Auto-Throttle”. I haven’t had a chance to think that through but I thought I would throw that idea out there.
I think this would be a better way, if there was a RCx input option named “Turbine_Start” that when the switch on the transmitter was flipped would override the “AutoThrottle” servo output and take it 1900pwm and when switched back would restore the output of the governor. This would initiate the start cycle when flipped for less than two seconds and have the additional feature that in case of a failed start in which the turbine doesn’t initiate a auto cool down cycle the operator could flip the switch to High and hold it there to manually engage the starter to cool down the turbine.
I’m going to test this by setting up a ancillary board that is just constantly putting out 1900pwm then use a rc relay controlled from the transmitter to switch from the CH8 output to the 1900pwn output from the PWM generator to initiate the start and once the start cycle is initiated flip the switch back to connect the CH8 output back to the Turbine ECU
@Shotfire I was going to propose something different but I think this is simpler and more easily implemented. Here is what I am thinking regarding constraints to this function being used.
Aircraft Landed
Aircraft Armed
Motor Interlock disabled
If any of these are false then the feature is not allowed or switched off, if it was on when one of these became false. Are there any other conditions you many want to impose on this feature?
This might be easy enough to code up and let you try in Copter 4.1.5. If you like it then I would push to get it into 4.2
Hi @bnsgeyer @Shotfire , I have coded a function to do this in Arducopter. It uses an aux_switch to trigger the start up sequence, so when you flick the switch (for like 2secs) HeliRSC goes from Idle to Full pwm then goes back to Idle.
The function only works “one time” after arming the copter, to prevent inadvertent switching while engine is running and it requires RSC state to go to “stop” case to reset it.
It can also be used for “motoring” the engine in case of hot-start, even if in that case the ECU should provide the ventilation sequence (if not, just reboot the system and ECU should start ventilating automatically if ITT is over 130C).
Here’s an example:

would you mind submitting it as a PR? Sounds like it would be useful for the community. I was trying to implement it this evening. But I would like to see how you did it.
ok @bnsgeyer , into Master right? I’ll get it ready in a day or two.
@Ferrosan yes master would be great. is there a commit or two in one of your tranches that I can cherry pick. That would be easy as well.
@Ferrosan is this the commit that implements that feature?
It is easy enough for me to use this. I threw something together last night and it looks very similar to what you did. This provides a good guide to what I need to do.
This sounds really good, can’t wait to try it out. Thanks
@Ferrosan Could you share your Throttle Curve and Governor setup parameters so I could use them as a starting point?
@bnsgeyer Bill, yes that is the most recent, based on AC4.1.1
Be sure to to make the ramp “smooth” enough, like I did in RSC, should take at least 1sec to go from idle to full pwm (i.e. human like).
I can confirm that the implementation I have works with Wren, Jetcat and Kingtech turboshafts.
@Shotfire I’m sorry I don’t have that heli anymore, sold it few months ago and didn’t keep a copy of the params. But I can help you in setting yours if needed!
Maybe it’s not necessary to mention, just to be sure, when you’ll perform the R/C learn procedure in the ECU setup, set the highest point of the throttle curve (H_RSC_THRCRV_100) to 100% and H_RSC_IDLE to at least 20%.
Once you’re done with RC learn procedure you can bring H_RSC_THRCRV_100 to around 70/80%.
Also, depending on the engine type, find the lowest possible “acceleration_delay” and “deceleration_delay” which you can safely run the turbine (lowering the accel delay too much will likely cause compressor stalls- with a very recognizable noise- lowering the decel delay too much will likely casue flame outs). This is very important when you will deal with the governor tuning. If i remember correct my Wren44 had accel delay set to 4 and decel delay set to 6.
@Ferrosan Thanks, that information helps get me started!!
FYI, this is a Wren 44 Gold
@Ferrosan thanks! I didn’t see logic that locks the feature out after it is used the first time. And then is reset after the RSC control is stopped. I see the ramped input though.
@bnsgeyer Bill, here:
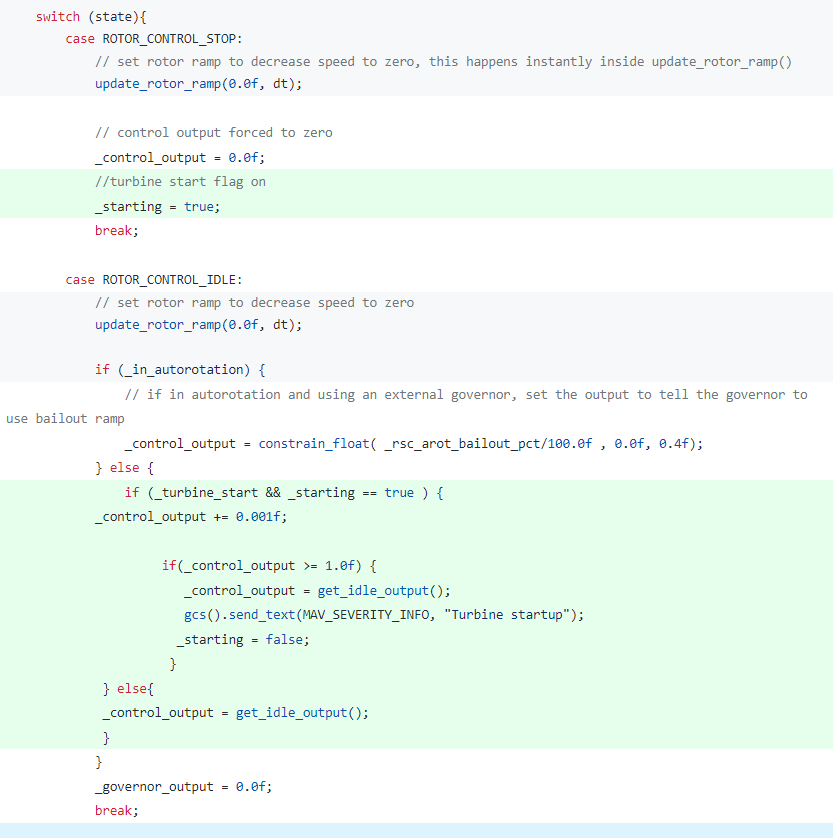
the _starting bool is handled internally to RSC library. So whenever the cycle is completed (control_output = 1.0) it gets set to false. It is reset only if the pilot disarm the copter (so RSC switch moves to ROTOR_CONTROL_STOP condition).
For example if you go from ground idle to flight idle and back to ground idle , _starting state is unchanged (false) so if the pilot flick the momentary auxiliary switch, nothing will happen.
The other bool condition (_turbine_start) is handled externally from RSC library, it depends only on the aux_switch position.
Hope this clarify a bit more the logic.
@Shotfire great little engine. I have had a very reliable experience with both the old 54 and the newer Gold 44.
Unlike other renowned brands, they never “quit” mid-air. Shame they produce only the 5kW version.
It does. Thanks. So what if there is a hot start. If it only allows one time use when in idle, How is the user able to motor the engine in the case of a hot start?
@Ferrosan
I do like the engine, but I have a hard time getting constant starts. I am at 6000’ so I have a low density altitude, especially in the summer, we quite often see a density altitude of 10,000’. Do you have any experience tuning the start cycle for higher altitudes?