Hey there,
I am trying to create a tuner app taking up the desired and actual and making a system state plant model then tunning it.
My issue for now is it possible to even do that since your data is already controller by a PID.
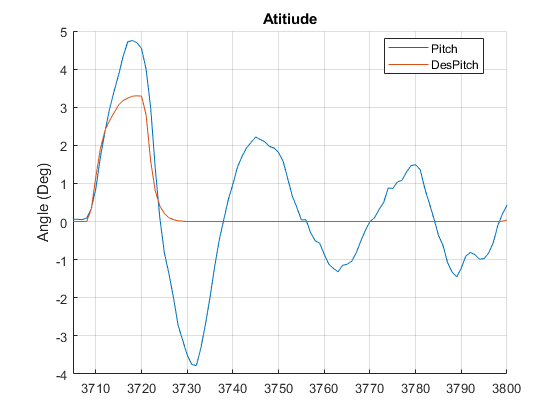
Here is a sample data as you can see my copter is not well tuned:
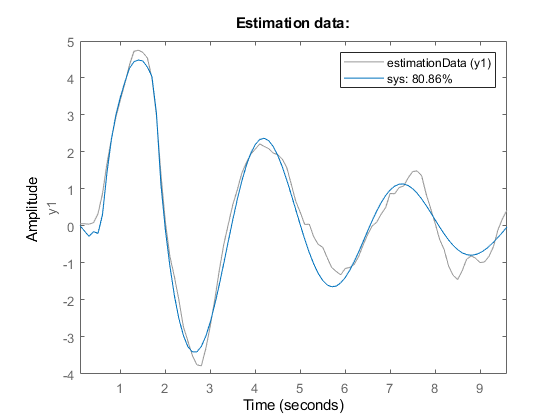
Here is a system state plant model to be used in tunning:
Original PID gains are:
Kp: 0.018
Ki: 0.08
Kd: 0.024
I know that the best method is Autotune but there is a risk in that also it requires a wind-free environment which is hard sometimes.