@Leonardthall and I have agreed this should be the default. Increasing it will not cause any harm and will help on copters with more extreme noise. I set it to 100 on some of my copters 
With the filtering enabled and configured as described in my prior reply, I was able bring the PID tuning up significantly higher than I have ever been able to do in the past. I was never able to get rid of overshooting at high speed high acceleration before. Bring the PIDs up that high started stuttering and fluttering and bad things. Now I’m able to bring it up and tune that overshooting right out. The pitch P alone went up 67% and D almost 40% higher. It can descend through it’s own wake a lot faster and more stable now too.
3 Likes
Hi Andy, I tested your FW with safety cable (1 meter). With the default parameters I had only one ceiling rocket (with the safety cable stretched and zero gas did not drop in altitude). However, for the first time, autotune started on the roll axis (unfinished for low battery). If setting the parameters as indicated in this guide (using parameters for quads less than 5 ")
http://ardupilot.org/copter/docs/tuning-process-instructions.html!
I had several uncontrollable rockets, so I put it back to default.
I set the filter notches as you indicated.

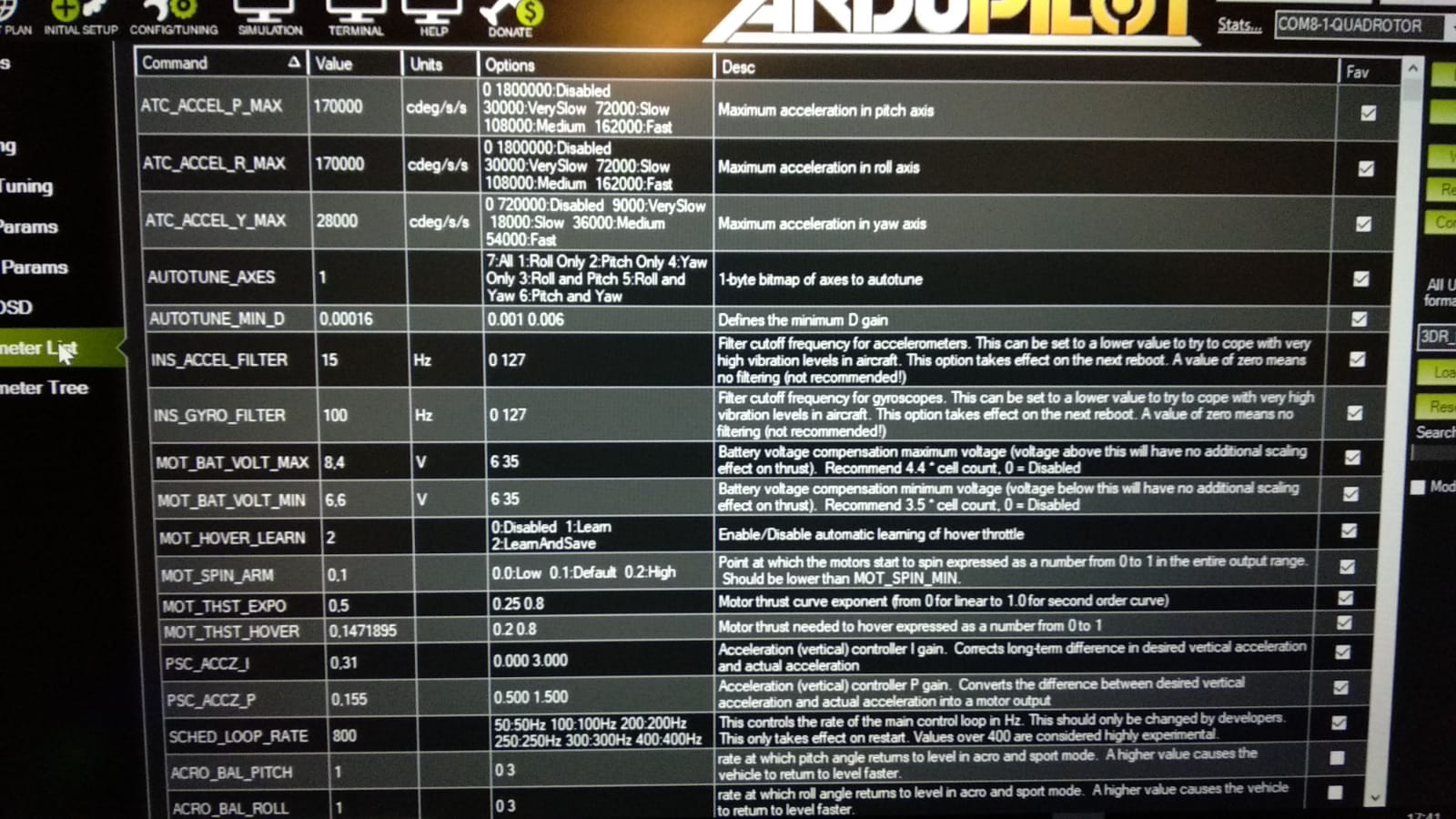
I have this FFT setting:
FFT_ENABLE,1
FFT_FREQ_HOVER,80
FFT_MAXHZ,350
FFT_MINHZ,100
FFT_SAMPLE_MODE,0
FFT_SNR_REF,25
FFT_THR_REF,0.35
FFT_WINDOW_OLAP,0.5
FFT_WINDOW_SIZE,32
INS_HNTCH_ATT,15
INS_HNTCH_BW,20
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,80
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,4
INS_HNTCH_REF,0.14
INS_LOG_BAT_CNT,1024
INS_LOG_BAT_LGCT,32
INS_LOG_BAT_LGIN,20
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
INS_NOTCH_ENABLE,0
Andy, why 4?
Thanks ![]()
If you use the firmware from @andyp1per INS_HNTCH_MODE=4 means that frequency tracking mode use dynamic FFT from his PR:
Ok
on the wiki I read this:
Values Range
0 - 3
Value Meaning
0 Disabled
1 Throttle
2 RPM Sensor
3 ESC Telemetry
It is a PR (Pull Request), until it get merged you will not see new value for parameter in the wiki.
Ah ok good, thanks!!
It looks ok, you could set INS_HNTCH_BW to 50 say I think.
When you get a rocket, what mode are you in? Is it AltHold? If so do you have foam over your baro?
can we discuss in a bit more details the factual differences between “3 ESC Telemetry” and “4” modes values for INS_HNTCH_MODE?
is there any benefit at all to use 4 instead of 3? i would presume 4 instead of 1 - throttle driven - is probably a valid idea, but, why would it (i mean mode 4) be better than an RPM driven model?
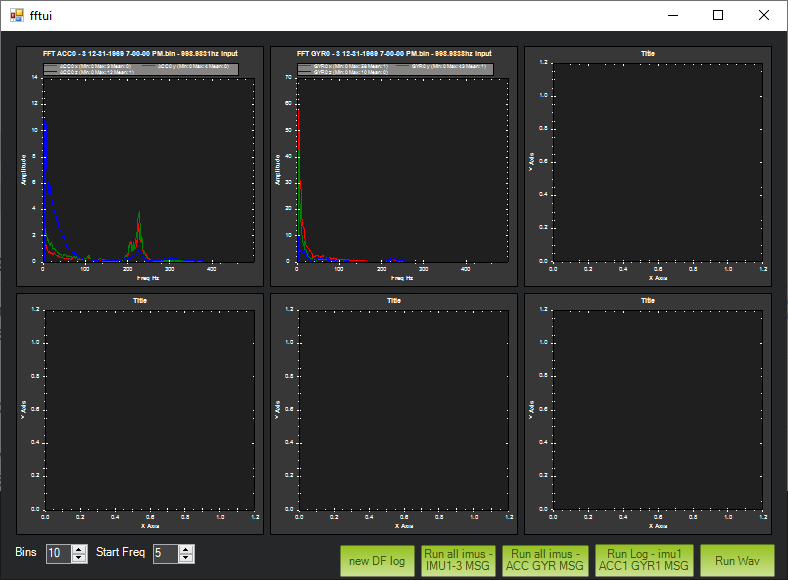
after that effort done yesterday, i could see in the end the complete absence of gyro vibrations in both 4" and 3" models, with 3" going automatically to 200hz area and 4" in 130hz area, using mode 3. it seemed to work very well.
took some time to find - here is the 3" FFT after filter.
the PSC_ filters - what do you have them on? try that - set them to 80 as below.
PSC_ACC_XY_FILT,2 PSC_ACCZ_D,0 PSC_ACCZ_FF,0 PSC_ACCZ_FLTD,0 PSC_ACCZ_FLTE,80 PSC_ACCZ_FLTT,0 PSC_ACCZ_I,1 PSC_ACCZ_IMAX,800 PSC_ACCZ_P,0.5 PSC_ANGLE_MAX,0 PSC_POSXY_P,0.25 PSC_POSZ_P,1 PSC_VELXY_D,0.5 PSC_VELXY_D_FILT,80 PSC_VELXY_FILT,80 PSC_VELXY_I,1 PSC_VELXY_IMAX,3000 PSC_VELXY_P,2 PSC_VELZ_P,5
If you have ESC telemetry then you definitely want to use mode 3 - it will give you the best result by far. Mode 4 is only for when you don’t have ESC telemetry, which is quite common in older ESC’s and larger copters. Mode 4 is CPU intensive however, so mode 1 is better if you don’t care so much about the accuracy and CPU is a concern (but it is significantly more complicated to set up and needs setting up all over again if you change any of the thrust control parameters). On smaller copters I have also seen mode 1 diverge significantly at high throttle, you can reduce this by changing the thrust linearization but that can also lead to control problems at higher throttle. Finally mode 1 is immediate, there is no latency in the calculation whereas mode 4 has delay which gets more significant the longer the FFT you run, mode 3 also has some delay but is probably not that significant.
i presumed the same. i would only suggest adding that as a general comment to wiki, so it would be clear for users - but, i think, in the current reality total majority of ESCs are blheli32 with support for telemetry, so, it should be easy enough to follow with mode 3 as a generic rule of thumb.
all in all it seems to work pretty darn well.
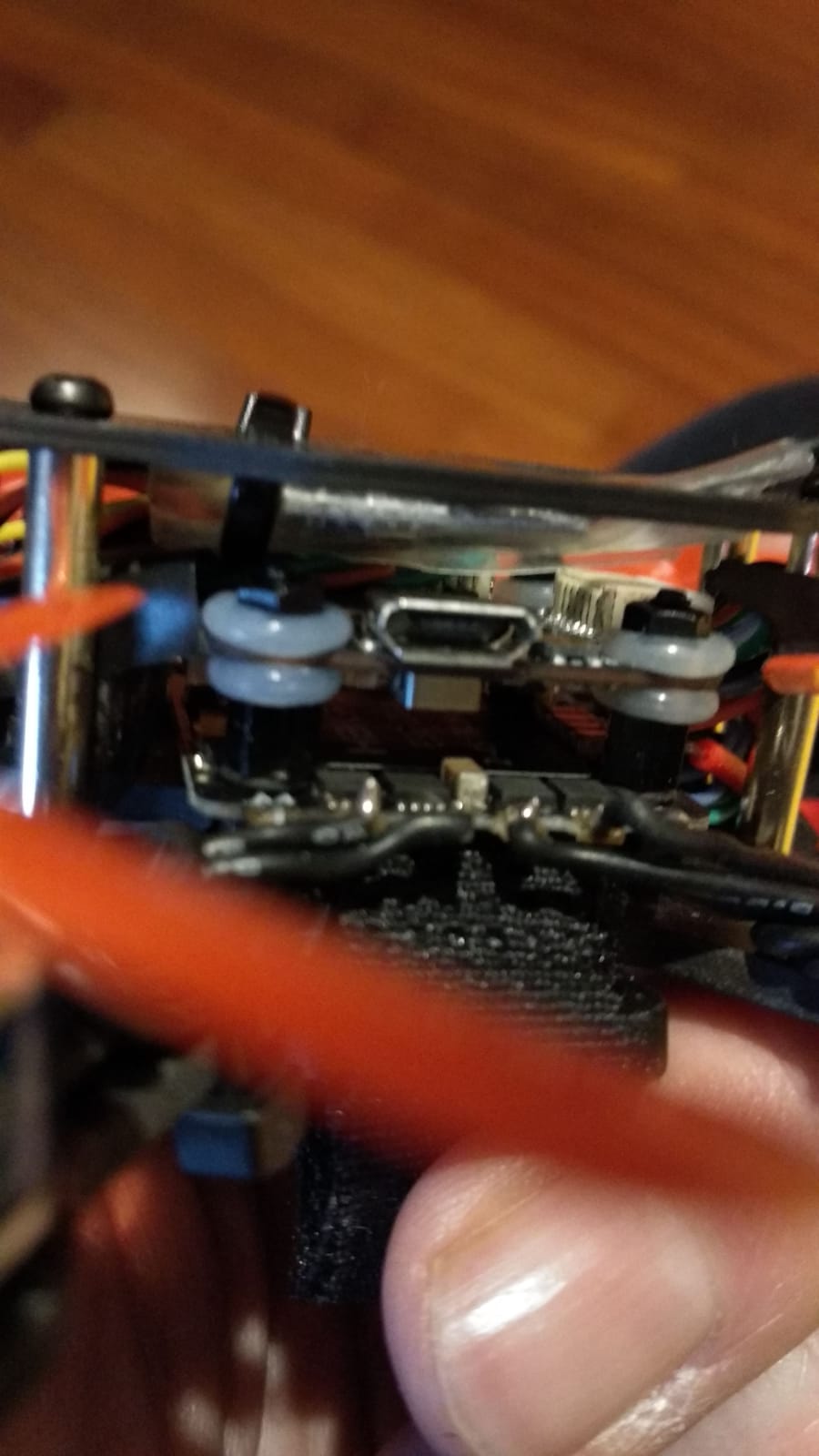
an other thing you can do - wrap electrical tape around the drone body to reduce amount of propwash into the controller area. just leave a small gap to connect the cord to the usb. it actually helps quite a bit.

1 Like
I decided to do a sanity check to make sure I’m not just seeing what I want to see with this. Since I was able to get all my PIDs turned up way higher and tighter, I wanted to prove that the notch filters actually allowed that to happen. Not just me doing a better job than all the previous times I’ve re-turned it.
So I flew it with the filters enabled and took a video. Flies great, love it, super smooth, more responsive and locked in than ever.
Then I flew with the filters disabled but the same PID tuning. It was completely unflyable! Major case of the shakes and shutters. Altitude hold just all over the place randomly climbing or dropping hard. Drifting around all over the place. I couldn’t even take a video of it because I couldn’t let go of the sticks long enough to hold the camera without it trying to kill me. In fact at one point it just randomly descended to the ground (not hard enough to break anything) and I couldn’t even disarm it. I had to use the kill switch.
So anyway, I was definitely not seeing what I wanted to see. This works, fantastic. I’d say this is one of the best control and stability improvements to hit ArduCopter in a long long time. Well done @andyp1per and @Leonardthall.

4 Likes
In alt hold, as always when rocket happens. I have a thin foam (1 max 2 mm) on the barometer, better bigger?
I try INS_HNTCH_BW to 50 asap, thanks Andy
Thanks Paul, i try asap!
2mm is not enough and on a small copter like that the baro is probably getting a lot of propwash. Try thicker and fuller foam.
1 Like
The harmonic notch filter is really magical for me, today I made three test flights with a new tuning,
the results!:
1.- The noise similar to a bee hive has disappeared.
2.- The abrupt drainage in battery power consumption has disappeared.
3.- More flight time (about 2 more minutes).
4.- Smoother control on all axes.
5.- More precise vertical and horinzontal displacement.
I get all these advantages, no matter that my flight controller is fixed to the frame without damping foams.
The problem related to altitude retention has improved a lot and now I am sure that this is due to the fixed mount of the flight controller.
1 Like