Setting up Static Notch and Dynamic Harmonic notch filters.
I’m setting up a copter (4.03) and noticed on the first tuning flights some weird behaviour in Alt Hold and GPS Pos hold when it comes to altitude.
It sometime shot up a few meters.
First i thought it was a problem with the barometer, but someone adviced me to take a look at the vibrations.
In the first log I saw a vibration failsafe at the point where the altitude altered.
Also in the log you can see the barometer alt reading to drop (even below take off altitude).
So i got the advice to setup the noise filters… so here I am.
I’m using this page as reference https://ardupilot.org/copter/docs/common-imu-notch-filtering.html
I’m not using esc telemetry so I’m using the Throttle based setup.
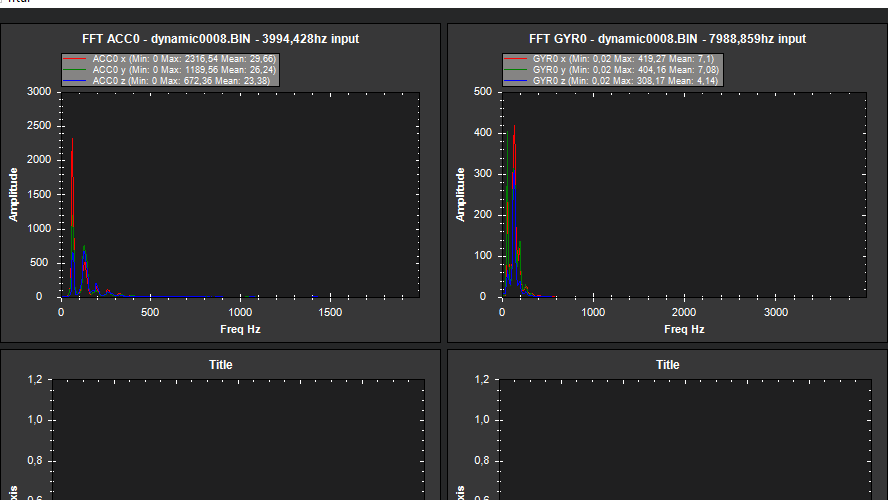
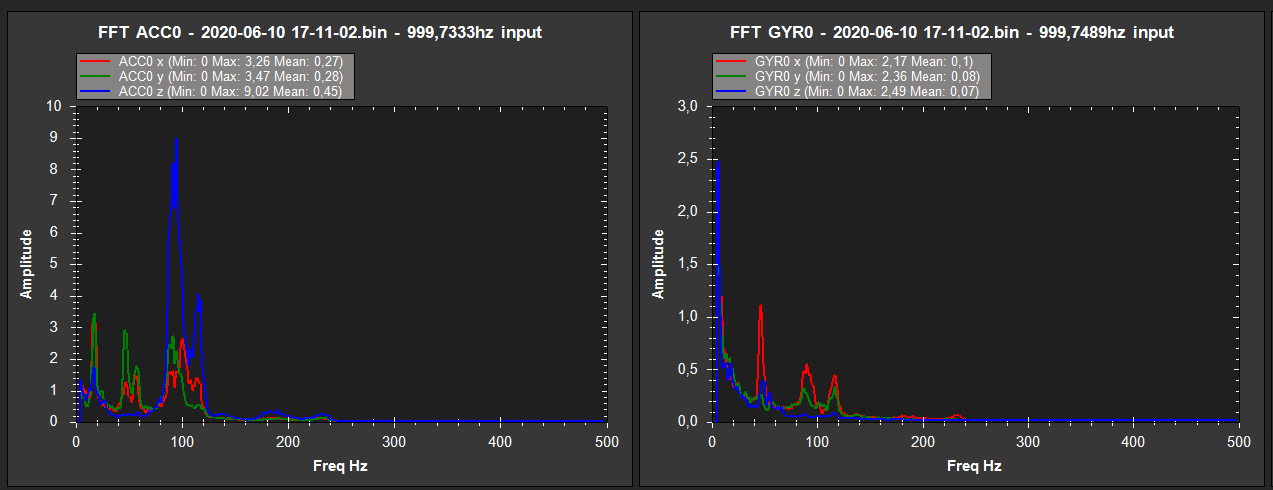
I setup FFT and used batch sampler to capture the 1st IMU
Set INS_HNTCH_MODE = 1 to use Throttle based estimation on the notch filter.
Set INS_LOG_BAT_OPT = 0 to capture pre-filter gyro data.
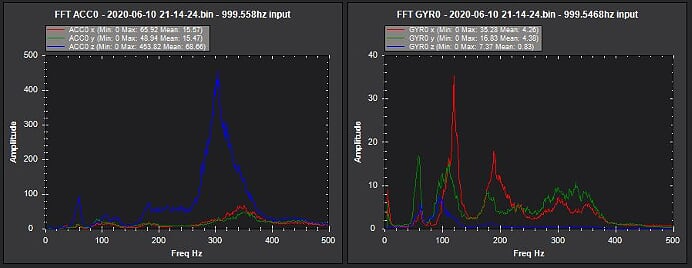
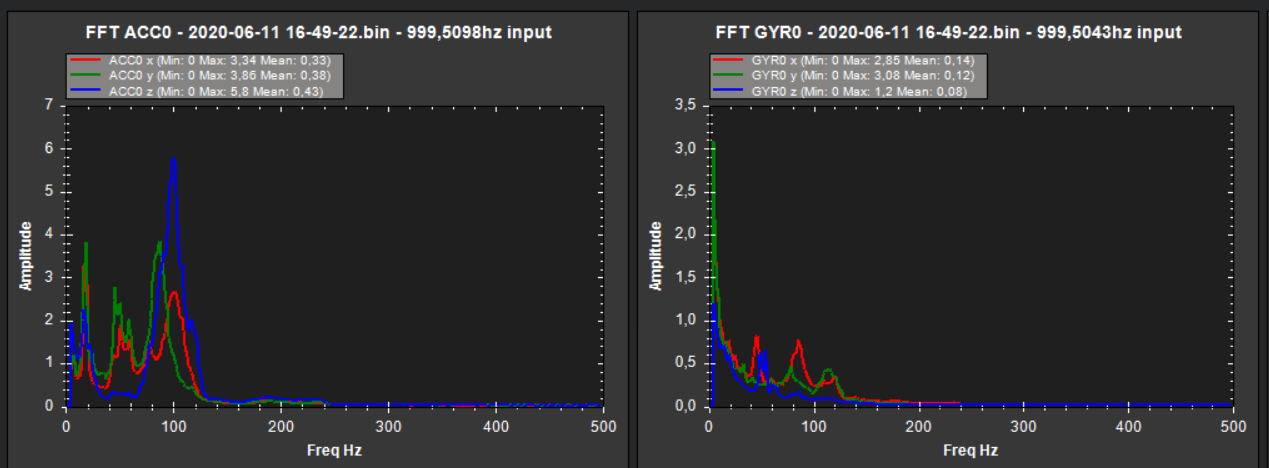
Here’s the graph
And a link to the LOG file https://www.dropbox.com/s/dzurvdzssxie7fl/2020-06-10%2021-14-24.bin?dl=0
I also used MOT_HOVER_LEARN = 2
This should give me a hover thrust and hover frequency somewhere.
Where can I find what these values are? So the values it learned.
What graphs do i look at in the log file to find this out?
i did find something resembling throttle and read a value of 0.17 and that also seemed the value it entered for INS_HNTCH_REF
Can someone help me what to fill in for
INS_HNTCH_FREQ
INS_HNTCH_BW
Is the frequency what you read from the batch capture?
Any help would be appreciated , so i can move on to step 2
Post flight setup and analysis.
Or can I set INS_HNTCH_MODE = 4 and be done with it