Hi Andy-I’m back to playing around with FFT for the notch filter and I see this error generated. Haven’t seen it before. 4.0.4-dev
Fixed by https://github.com/ArduPilot/ardupilot/pull/13741 if you are playing around with FFT I suggest you use that PR as it has a lot of bugfixes and improvements.
And in fact if the PR fixes your issue then that’s a really good datapoint as @tridge was running into the same problem.
OK, Could I get the latest build for a Pixracer?
This is a build of my small copter branch so includes FFT, Double-Harmonic Notch, SRXL2
Thanks Andy. I’m not clear on a few of the parameters. Entered or derived maybe?
FFT_BW_HOVER
FFT_HMNC_FIT
FFT_THR_REF
INS_HNTCH_OPTIONS
OK, I see what’s learned from the Parameter Wiki. Think I’m good.
FFT_BW_HOVER FFT_THR_REF are learned values that you can use to configure the throttle based notch
FFT_HMNC_FIT leave this at the default
INS_HNTCH_OPTIONS set this to 1 to get the double notch
If the INS_HNTCH_OPTIONS to 1 is supposed to open some other parameters I’m not seeing them.
No it’s literally 1 for double notch or 0 for single notch
Right, I guess I expected some double notch specific parameters to populate after enabling it and a refresh.
it was forever since i looked at it all - but, summer comes and i reworked old tarot 690 to fly on matek f765 brain. uses 6 motors D4215-650kv on 5S 6000mah lipo. an obsolete big bird from the past. 
So, I activated notch filter on throttle - so far so good, seems to be quite stable. it uses oneshot ESCs, set on mode 1 - i test it with no load yet so it shows crazy low MOT_THST_HOVER=0.125.
peak of vibrations is at 110hz, all filters in INS set to 40hz. INS_HNTCH_ATT=40. seems to be ok so far.
to be honest it is crazy to see the level of vibrations this big bird generates, left is pre-filter, right is post-filter. dunno, it is with 40dB suppression. may be need to set more, about 80. will see.
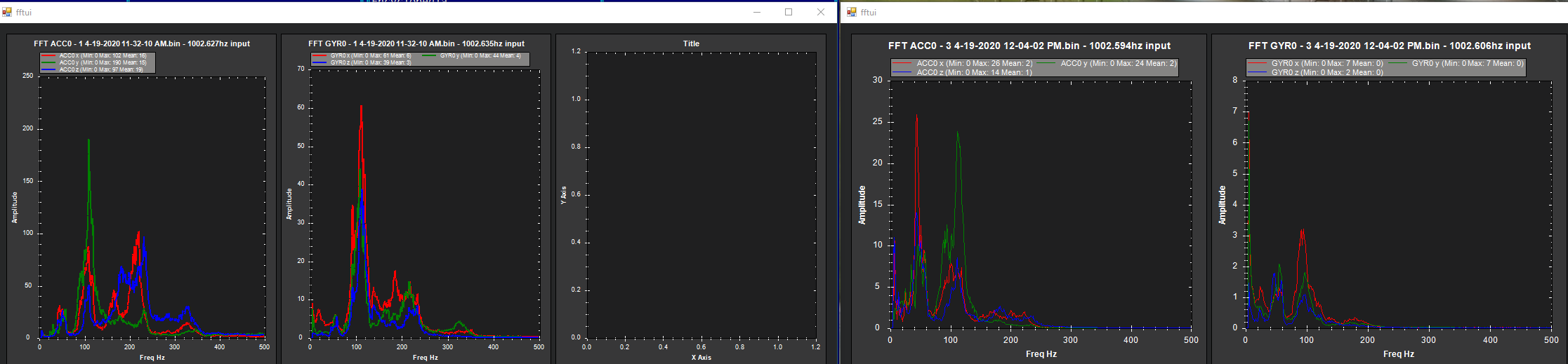
odd, i do not recall why but i set BW param really high - to 60. should it be back to 10? what was concluded about that?
- ok, i found in the old initial discussion we talked about INS_HNTCH_BW = hover_freq / 2.
is it still the case?
other thought - damn, it hovers now, according to f765 embedded current sensor, at 6A current with no load and at 8A hover with a gimbal. a 45 minute hover time, with a 6000mah 5S - it is too good to be true, honestly, it was before a 15 min drone, but, i shaved off a ton of weight from it. or it can mean a F765 matek has a shitty current sensor that reads bogus. gotta do a real test soon, to run an autotune on it.
It looks pretty good if you look at the scale on the post-filter gyro. You can use mavfft_isb to get a more idealized picture of the power under the peak.
I am just starting to get my Octo back up in the air. Wondering if you could take a look. I still am not 100% clear on which harmonic is which.
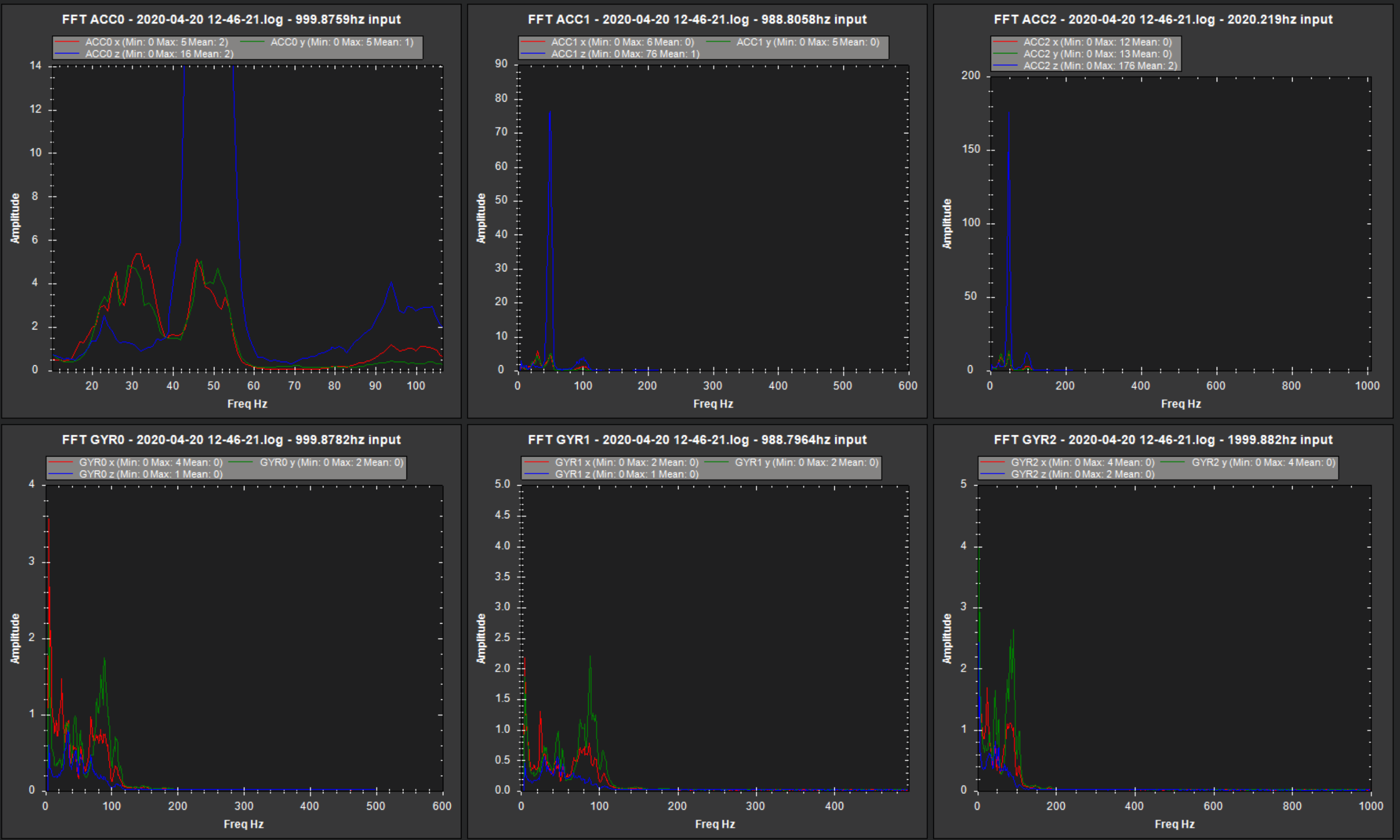
Massive spike at 50hz
The Notch is active
Here are my settings.
| INS_HNTCH_ENABLE | 1 |
|---|---|
| INS_HNTCH_FREQ | 50 |
| INS_HNTCH_BW | 30 |
| INS_HNTCH_ATT | 40 |
| INS_HNTCH_HMNCS | 11 |
| INS_HNTCH_REF | 1 |
| INS_HNTCH_MODE | 3 |
I think its set for 1,2,4th harmonics
Is it the 3rd that’s spiking? How do I know which is which?
Thanks
Can you do a pre-filter graph? It’s much easier to tell that way round
Will do that this afternoon, thanks
Is the amplitude of the FFT useful when comparing different flights? I know if I take two similar flights, it’s useful.
But if I look at a log from a 1 minute flight, and then one from a 6 minute flight, will the 6 minute flight have higher amplitude because it’s longer and has more samples?
I’m not exactly sure what Michael does, but I think he averages all the frames so the amplitude should show something sensible. If you use mavfft_isb.py then the graphs are definitely comparable as they are given in units of power spectral density
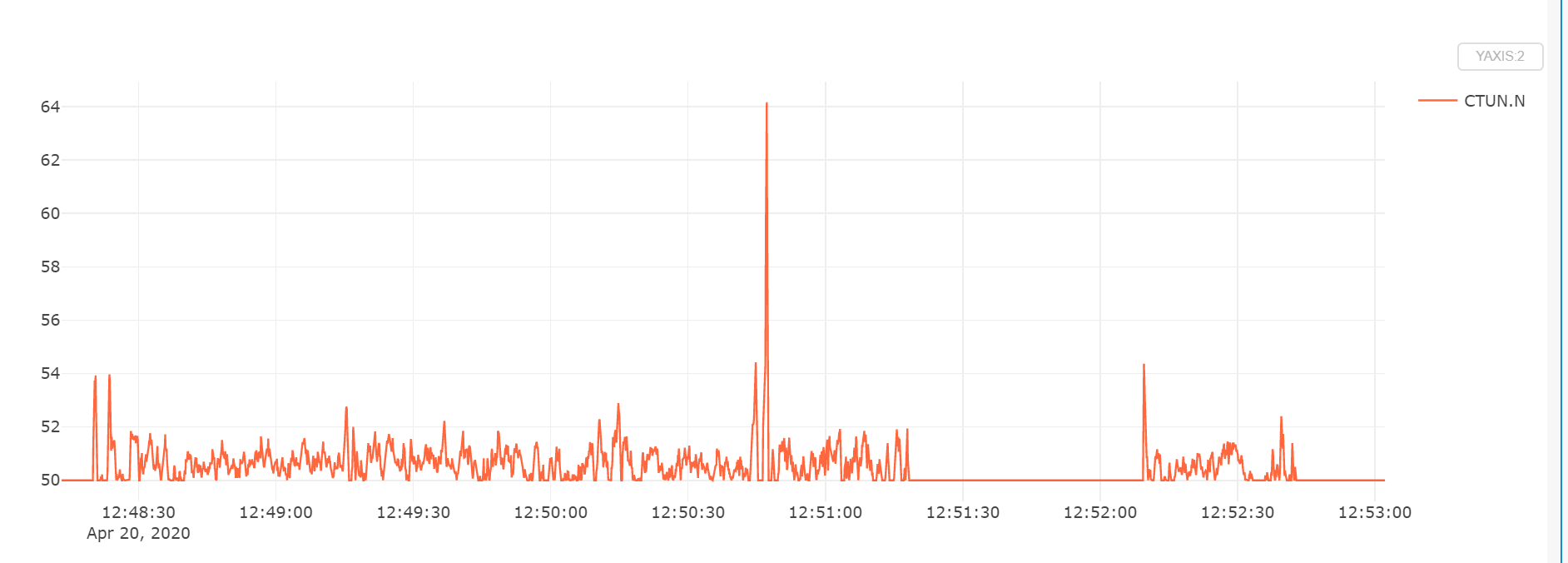
Here you go
Do I read this as:
Red first Harmonic
Green Second
Blue Third
Is that Right?
Thanks for taking the time to look and assist
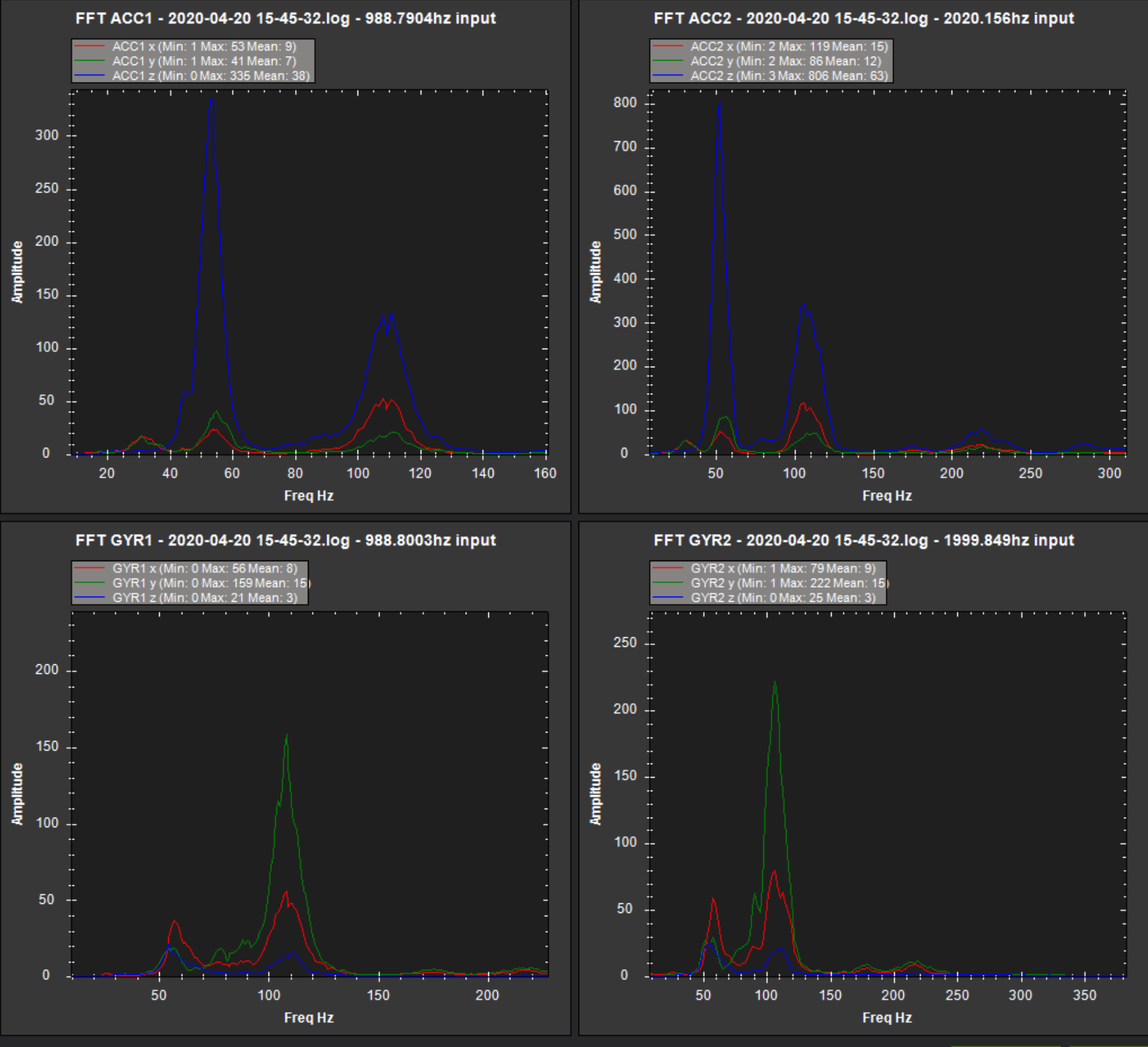
No, those are just your X,Y,Z axes.
1 Like