What?!? Leonard doesn’t know the specifics of every single users build?!?
ESC telemetry really does make setting it up easy.
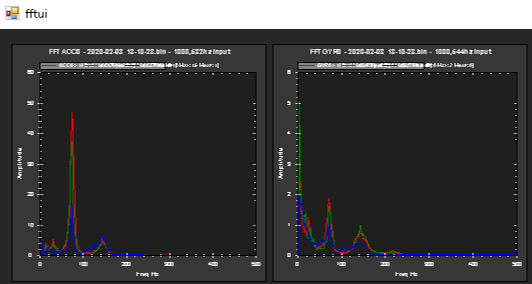
Dave, It looks good. You could try a bit more attenuation. I don’t know what a safe upper limit is, though. But you could probably get the FFT a bit flatter.
Maybe narrower, like 30 bandwidth, and increase the attenuation to 50… (assuming you have ATT at 40 now). It’s probably good as it is, but you could try a few other values if you want to experiment with it.
I’m not sure if there is a way to know how much attenuation to apply based on the FFT. I know early in the days of the FFT there wasn’t…
I recommend using 40 as it is pretty much a perfect notch then. The only reason we have a parameter for this at all is because the fixed notch can be used for other more advanced control applications like canceling a resonance in the control bandwidth where you only want “just enough” to do the job.
We could have left this hard coded but decided that it was worth the flexibility it provides when getting into the edge cases that 99% of users will not need to consider.
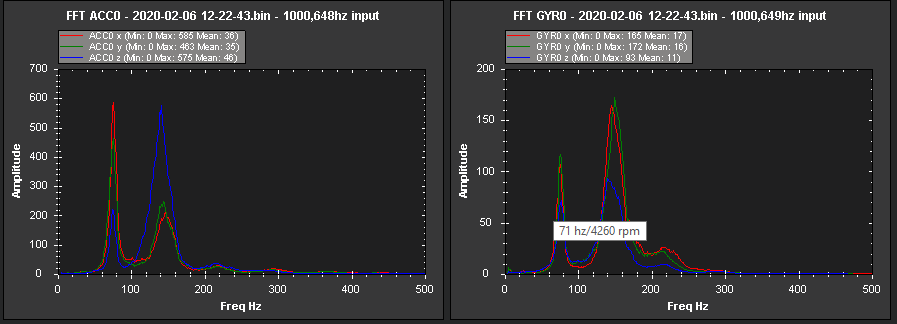
To me this looks like you have peaks at the first, second and fourth harmonics so I would try setting INS_HNTCH_HMNCS to 11. I don’t think 20Hz BW is enough looks more like 40Hz.
Are the values about right…around there?
I have same questions in cubepilot forum, but looks like there is more discusssion about subject here, so sorry for the double post, just want to get on top of this new feature.
Based on the frame size and accumulated data from larger copters I’m pretty sure that your primary harmonic is at 76Hz, in which case you could set INS_HNTCH_FREQ to 76 and the 152Hz peak will also be squashed (assuming you leave the harmonics setting at the default). You can then turn off the static notch (INS_NOTCH_*) settings. The peaks are pretty pronounced - if you make these changes you could turn down the BW setting to 40Hz.
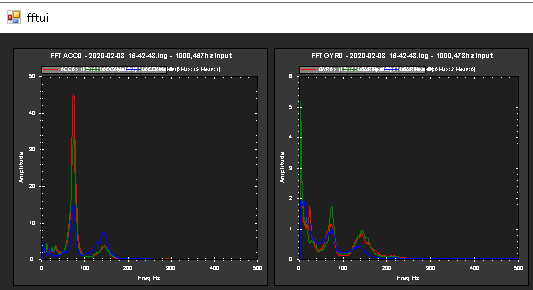
Looks ok, better than before for sure, short test on back yard and i got wibes 3.3 under 25, really good, will see after proper test flight and pid´s now are just my best guess, with bug on autotune feature… didn´t want to go with default pids, so will see when i get a chage for proper flight and get some data. Mayby go for autotune when its working again.
Really happy that i got harmonic´s finally done. All thanks to andyp1per
If anyone is feeling brave I have a new PR in the works that creates a double harmonic notch. https://github.com/ArduPilot/ardupilot/pull/13121 this is designed to more effectively target the spread of noise which you particularly see on larger copters. It works fine in SITL but needs some real world testing.
what kind of testing ?
You helped me a lot so…Is it so that ill get the params from you and well see what happen´s…would be a bummer to crach this frame again