The harmonic notch filter is really magical for me, today I made three test flights with a new tuning,
the results!:
1.- The noise similar to a bee hive has disappeared.
2.- The abrupt drainage in battery power consumption has disappeared.
3.- More flight time (about 2 more minutes).
4.- Smoother control on all axes.
5.- More precise vertical and horinzontal displacement.
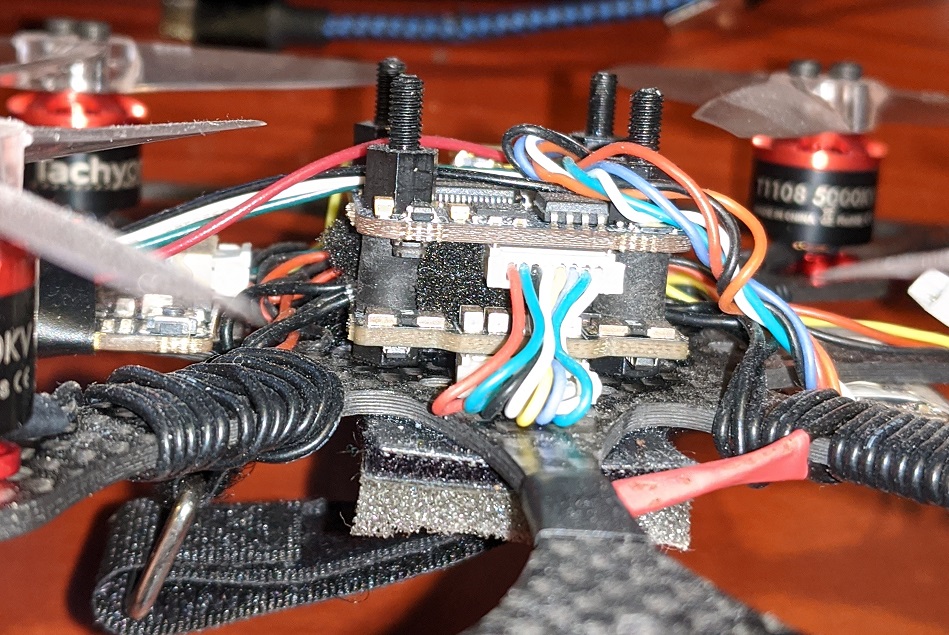
I get all these advantages, no matter that my flight controller is fixed to the frame without damping foams.
The problem related to altitude retention has improved a lot and now I am sure that this is due to the fixed mount of the flight controller.
those mounts exist in different form factors, including M3 as well, you just need to search for one that fits. there is no other good solution to mount small FC, really.
this one below is the same rubber post in M4 8mm height. works fine in a standard 20mm stack format with ESC below.
I’ve used M3 of these but found them a little too solid, I currently have some customized lumiere silicon mounts (https://www.getfpv.com/orange-rc-bobbins.html) but its not ideal. It’s one reason I wrote the harmonic notch as vibration isolation on these small copters is just too hard
true, very true. now with this great new filter the firmer ones actually should be benefitial for racing models, as you ideally want FC to wobble the least amount possible in sharp turns, while still isolating from motor noise. so it is always a difficult task, i also used similar ones, and sometimes in a combination of 2 softer ones and 2 firmer ones. still, it is a same approach, to use a rubber bobbin in a usual mounting hole. in the gecko i actually used both the combination of those bobbins and the rubber insert into the hole the kakute f7 mini came with. seems to be ok.
Like I mentioned in the microarducopter thread, I still use tape for my FC… Like the old original pixhawk, heh… Usually little gel pads and very strong double sided tape. Can make them thin, so the FC is just barely above the ESC. The FC’s are so light I’ve never had the tape come loose, and I fly daily for years now on these copters.
Although like Paul mentioned, hard mounting might be better now with the filter… I think I’ll try hard mounting this winters project.
double side foam tape works in some scenarios, as long as you do not tape to the surface of the ARM processor chip as in this case it may overheat.
i used to do that, but, i also found that after some series of good smacks FC sometimes comes off that tape, well, if you hit frame hard enough at a tree or something - those armattans can survive pretty much anything… rubber posts have never failed me yet.
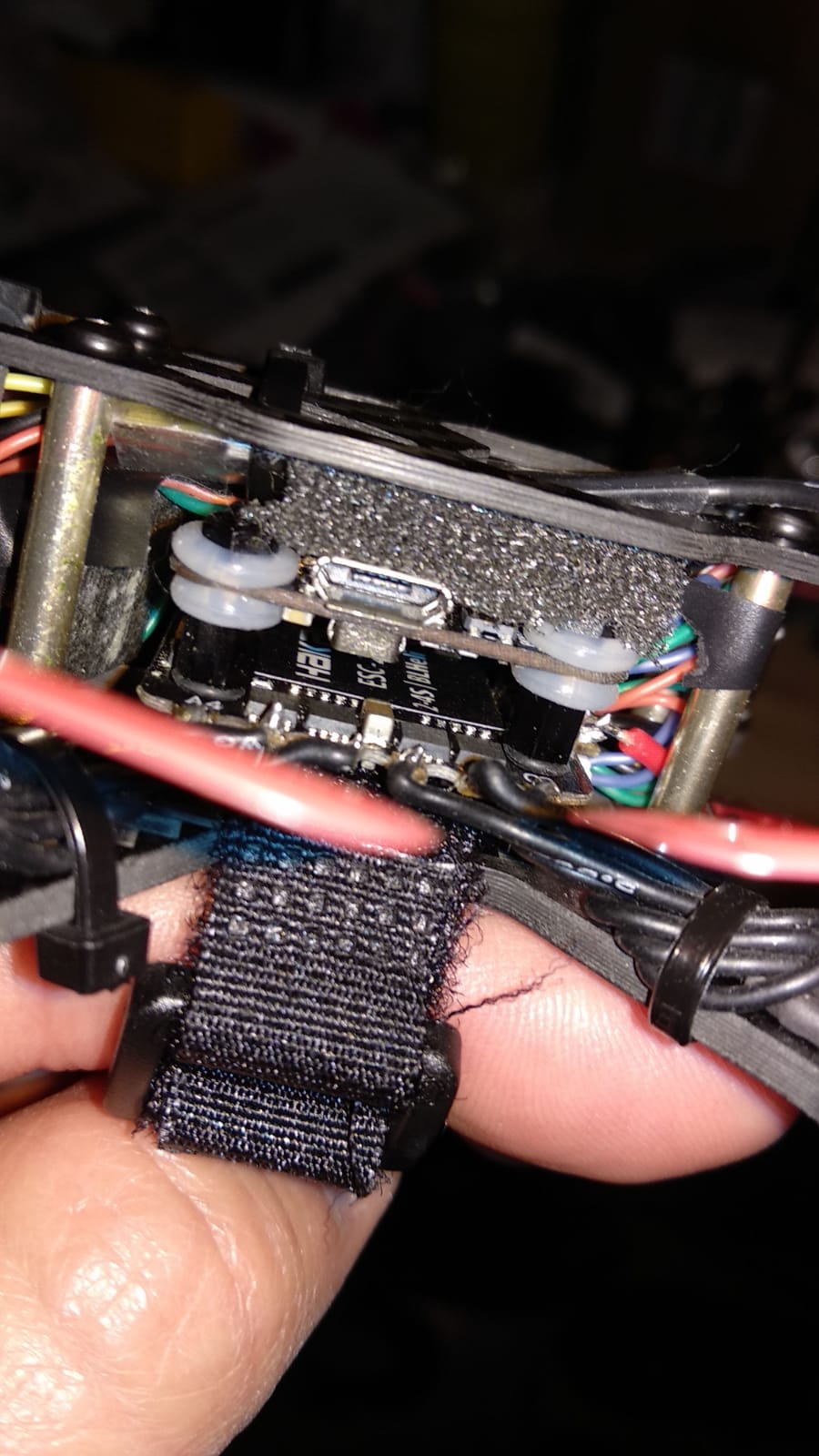
Full sponge on the barometer and INS_HNTCH_BW = 50. A battery without rocket and starts the autotunning on the roll axis
In alt hold (with 1 meter security cable), it sometimes loses altitude and I have to give it gas. Maybe because it’s too low?
Can it be useful to set these parameters? specially MOT_THST_EXPO?
Not all these parameters are transferable from one copter to another, especially
PSC_ACCZ_I and PSC_ACCZ_P that must be PSC_ACCZ_I = 2 x MOT_THST_HOVER and PSC_ACCZ_P = MOT_THST_HOVER with MOT_THST_HOVER the hover learned.
One interesting thing that I see on @andyp1per params is PSC_ACCZ_FLTD=40, when you pass from 3.6.11 to 4.0.0 this param is set to 0, I have to try with 40.