Hi,
I am tuning a 6kg quadcopter to be flown at high speeds of 28m/s. The specs are:
Airframe: T-Drones M690 Pro airframe with 18-inch props.
Battery: 22000mAh 6S
I followed the Tuning Process Instructions and have set the harmonic notch filter. The copter is stable flies well with very little vibrations (< 10). However, during high speed flights it is showing a strange behavior. As i give it the forward stick command, it speeds and then brakes when the max angle of 40 degree is achieved. Visually the copter oscillates in air going forward. It is clear form the logs that the copter is unable to maintain the max angle and brakes as soon as it reaches the max angle.
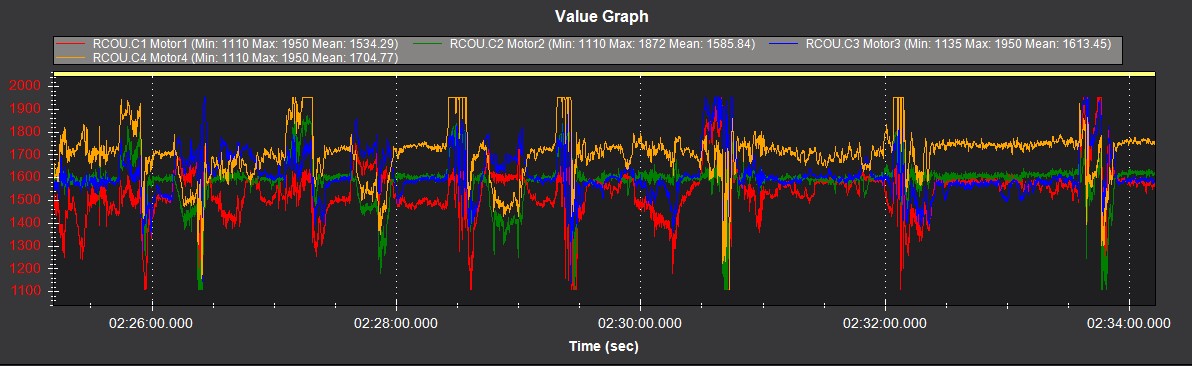
The Flight Log is attached here
I require help in understanding and solving of this problem.
You input in this regard will be highly valued.
Thank you.
What ESCs do you have?
The max angle in Loiter is 45% and you are not quite getting to that. The overall maximum angle is 60 degress, you could try AltHold or Stabilise for outright speed, but there needs to be much improved tuning first.
Set these:
ARMING_CHECK,1
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Depending on your ESC answer, we will see what else needs to be done.
Good find Dave - that will definitely limit sped and lean angle
Yea, there are a few issues here I think. As you pointed out it’s essentially untuned. The average PWM output during hover sections of this flight is high (insufficient thrust/weight) which MOT_THST_HOVER confirms. And one motor is demanding a higher output for some reason.
But I wouldn’t say a M690 Pro is any speed demon anyway… Tune it, drop some weight and perhaps a bit faster flight can be sustained.