Essentials plus a few things to adjust
ARMING_CHECK,1
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2 or 3
ATC_INPUT_TC,0.2
ATC_THR_MIX_MAX,0.5
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
FENCE_ENABLE,1
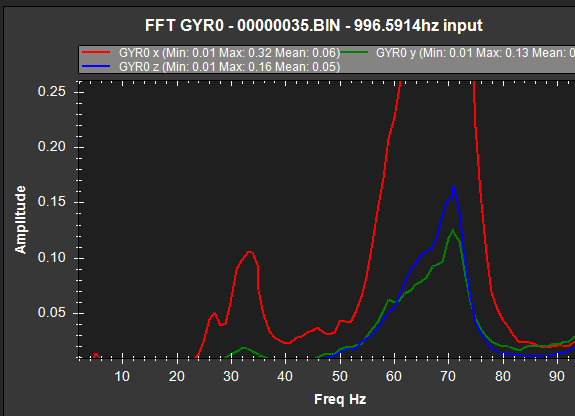
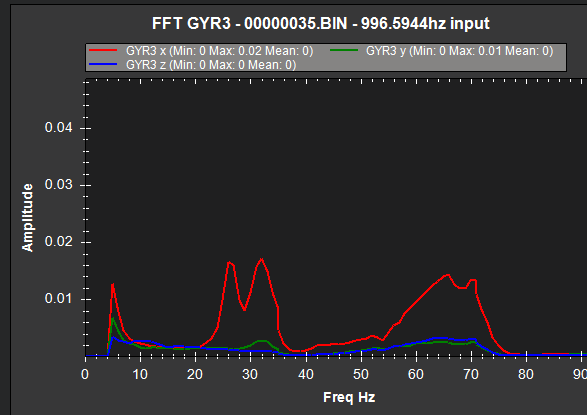
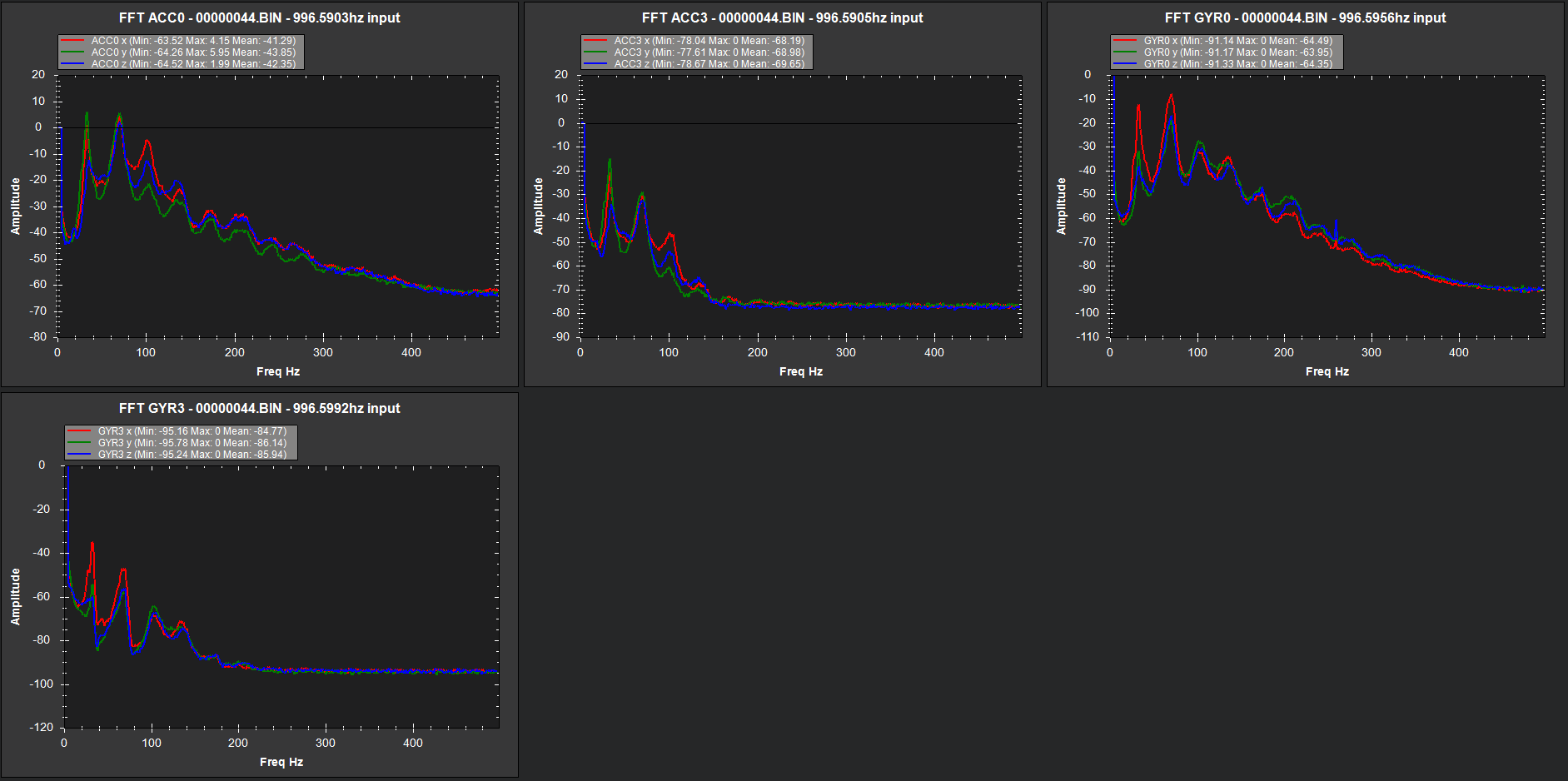
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.25
MOT_PWM_MAX,1940
MOT_PWM_MIN,1100
MOT_THST_EXPO,0.4
MOT_THST_HOVER,0.20
After these changes retest your MOT_SPIN_ARM and also MOT_THST_HOVER will need some time to relearn in the next flight. Then adjust
INS_HNTCH_REF = 1xMOT_THST_HOVER
PSC_ACCZ_I = 2xMOT_THST_HOVER
PSC_ACCZ_P = 1xMOT_THST_HOVER
You could reduce the logging to leave out fast attitude unless you need it
LOG_BITMASK,145406
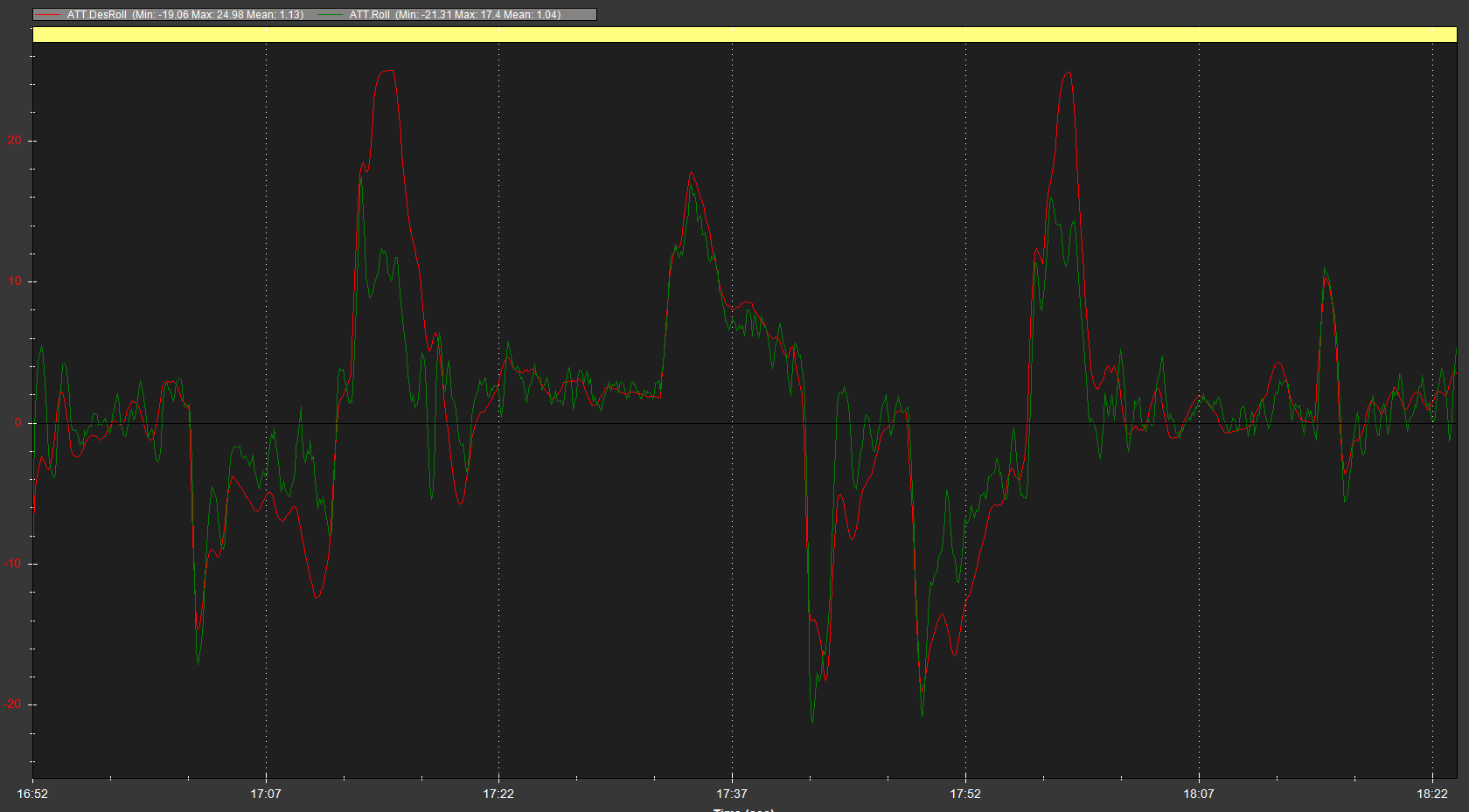
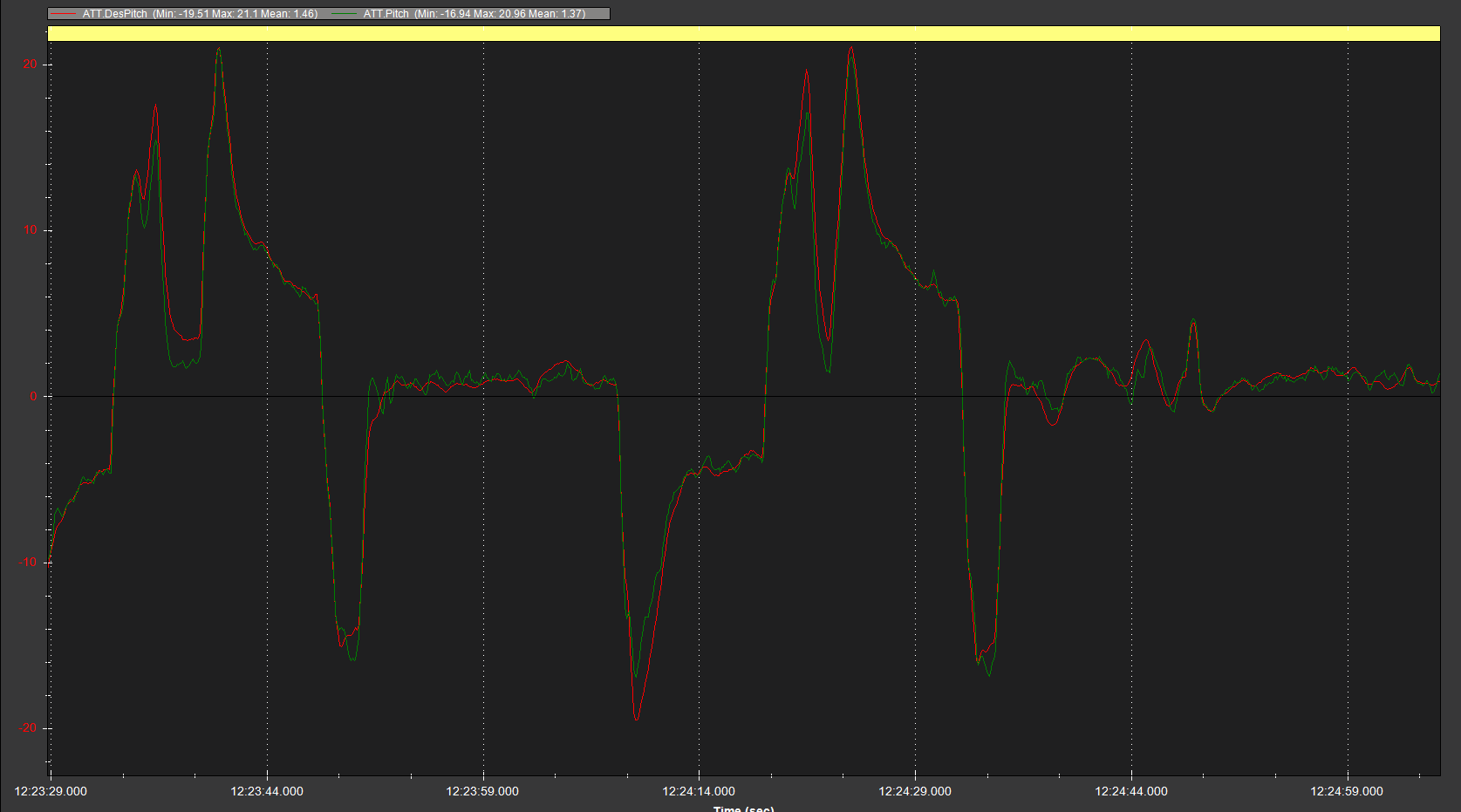
Your pitch and roll PIDs were quite different, yet the M1200 is quite square. Try these to settle down the attitude control and standardise
ATC_ACCEL_P_MAX,20000
ATC_ACCEL_R_MAX,20000
ATC_ACCEL_Y_MAX,8000
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.0035
ATC_RAT_PIT_P,0.12
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_D,0.0035
Start the next flight in Stabilise and you will have to manipulate the throttle continuously to hover. If there’s reasonable stability then use AltHold for a while then Loiter.
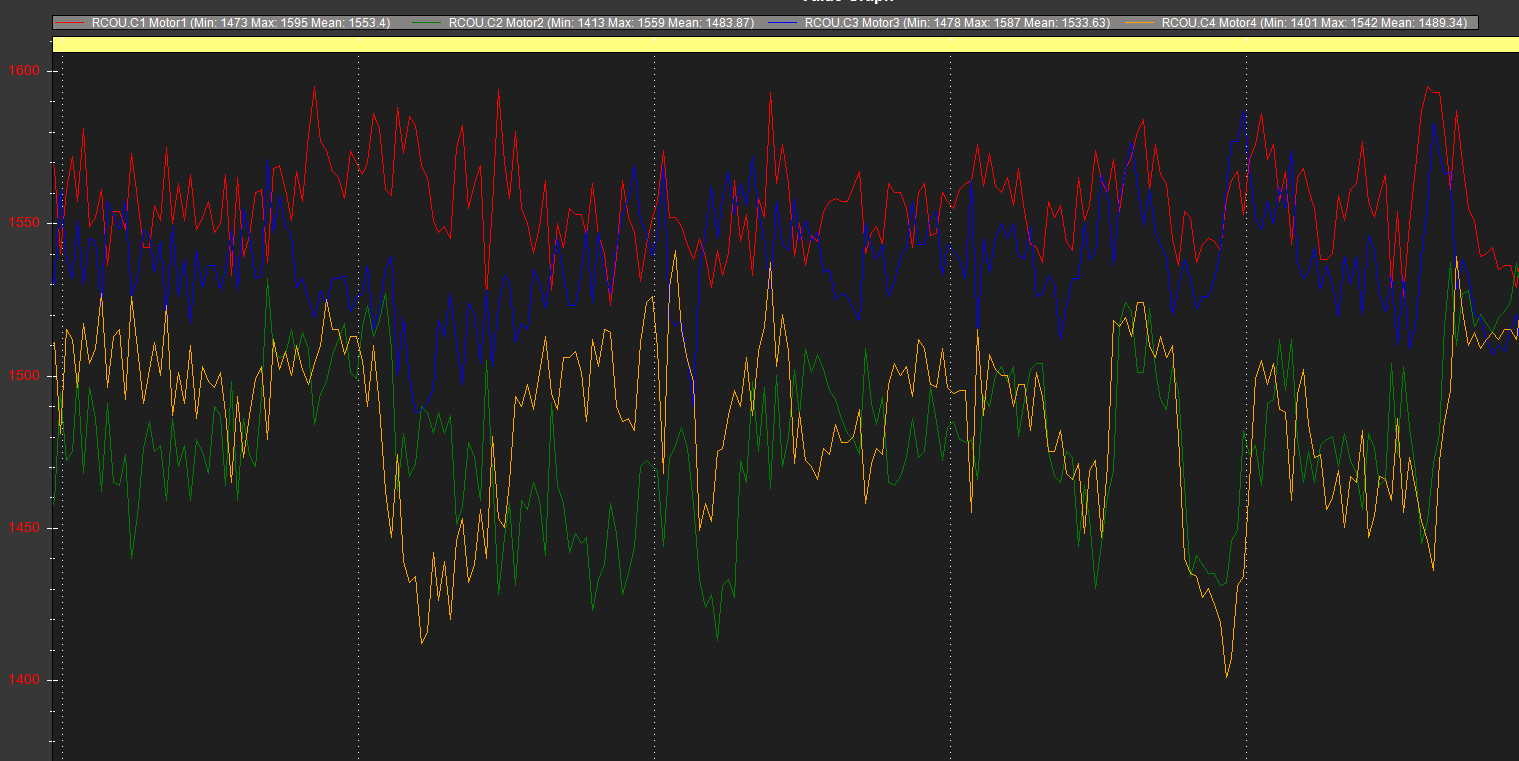
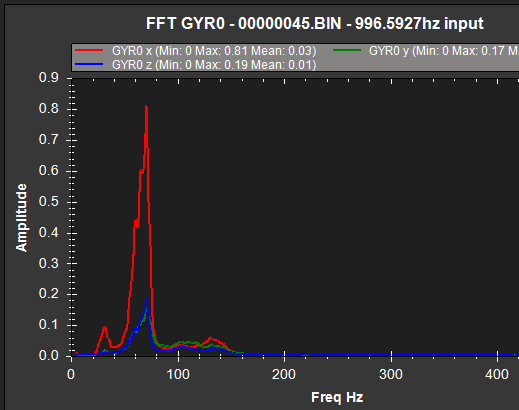
Let’s see that .bin log
As for 25m/sec I dont like your chances.
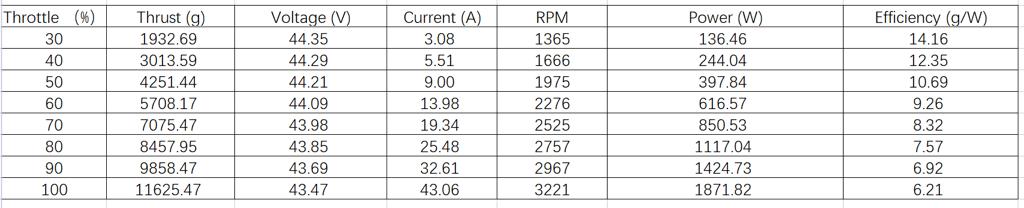
Plugging a few things in to ecalc gives you a long hover time and 3:1 thrust to weight ratio, but motor temperature and electrical power are off the scale for anything but hover.
Assuming you could even get these motors and props up to a high RPM without something catching fire the best you could expect is probably 67km/hr or 18 m/sec tilted to nearly 70 degrees.
EDIT
Also set PILOT_THR_BHV,7 since you appear to have a spring-centered throttle.