I’m tuning a new quadcopter (X-config) at the moment. This is my first clean sheet build of a multicopter. Some info below…
Motor-Motor centre diameter is approximately 750mm,
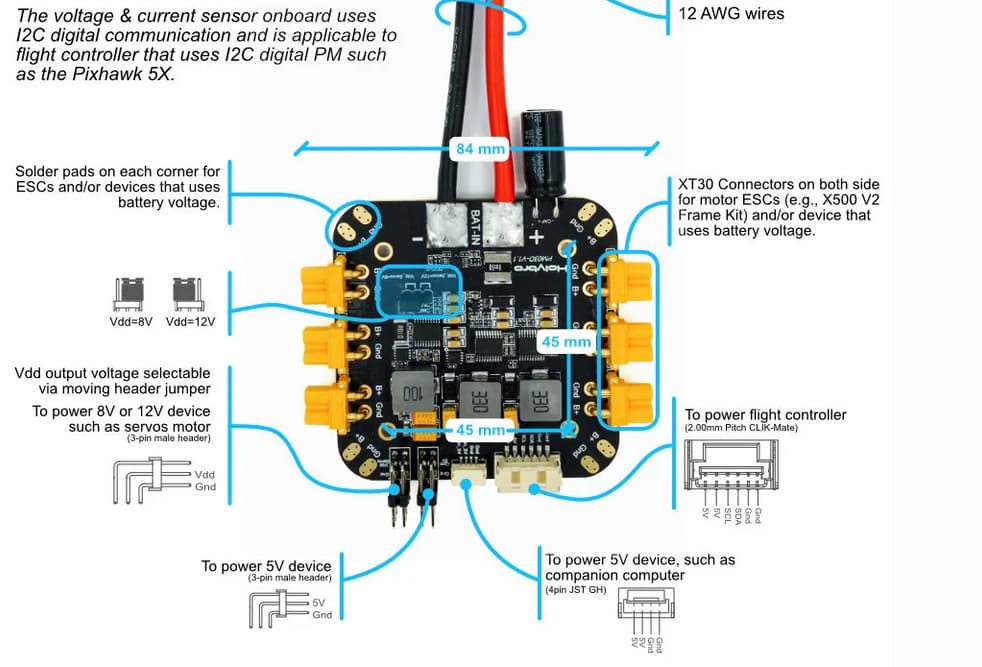
Autopilot - Cube Black + Here2
Take off weight = 4.3kg,
Battery = 6S10k LiPo
Motor = T-Motor U5 kV400
ESC = Xrotor 40A
Props = T-Motor polished 15x5
T/W >2
Copter 4.3.6
Here’s the log:
Flight Log
It’s worth mentioning that the aircraft has the weight distributed along the length of the body and tends to be rear biased at the moment - battery offsets the notional payload in the nose which is represented by a weight at present. This means that I can expect some inertia coupling, a softer pitch feel and lower yaw authority when compared to a copter with all the weight centred around the CG.
I set the copter params up using the quick start process in Mission planner. This went well and gave a pretty flyable copter in Stabilise and alt hold.
I have run through all 4 autotune options now - have the least faith in the yaw, the roll is really nice and pitch is pretty good.
Poshold is now fine - first time I used poshold it started to toilet bowl twice and since that point has been fine in poshold.
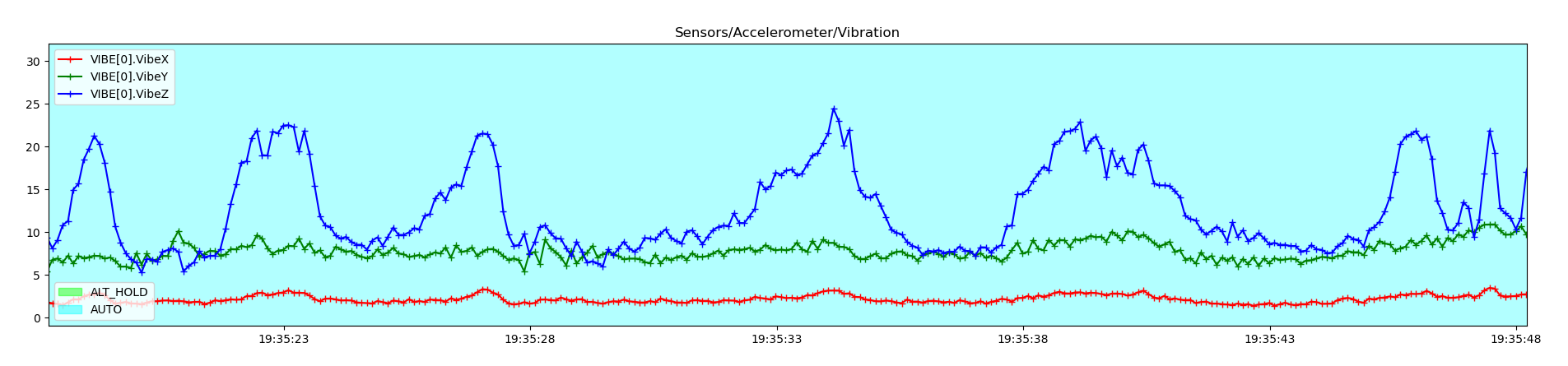
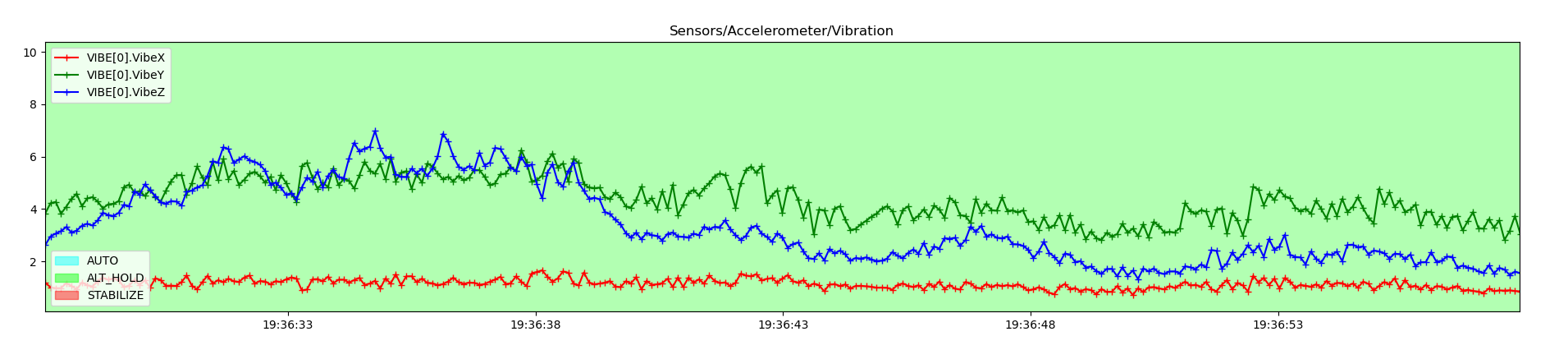
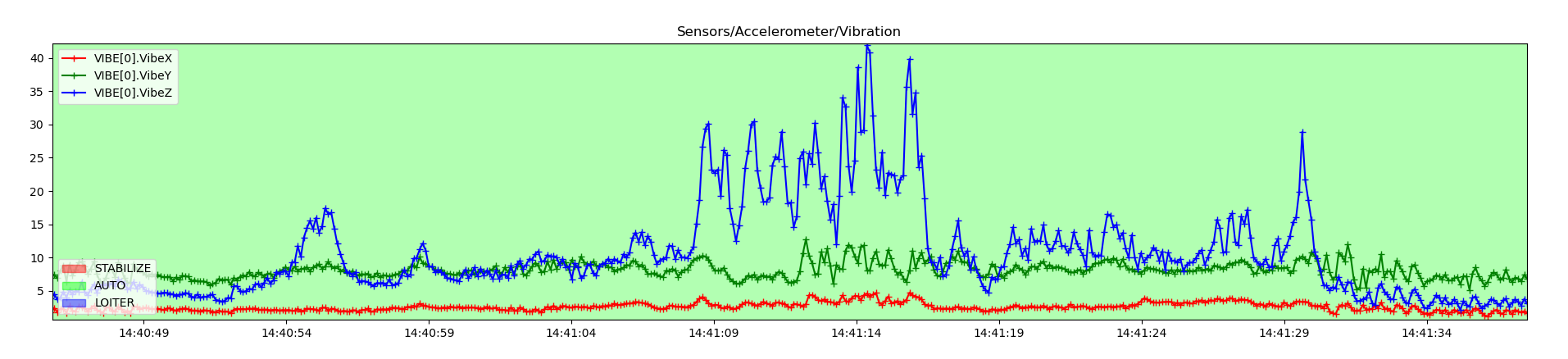
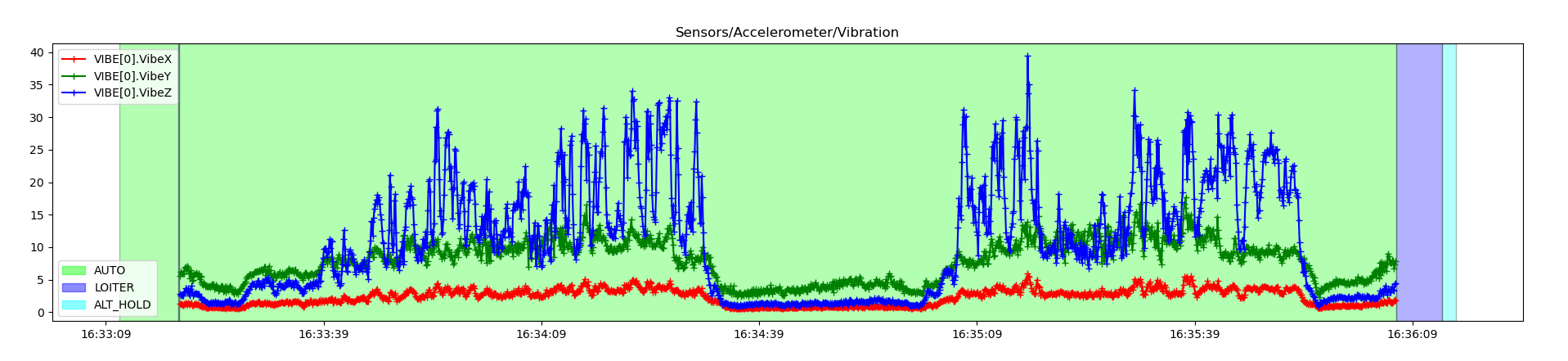
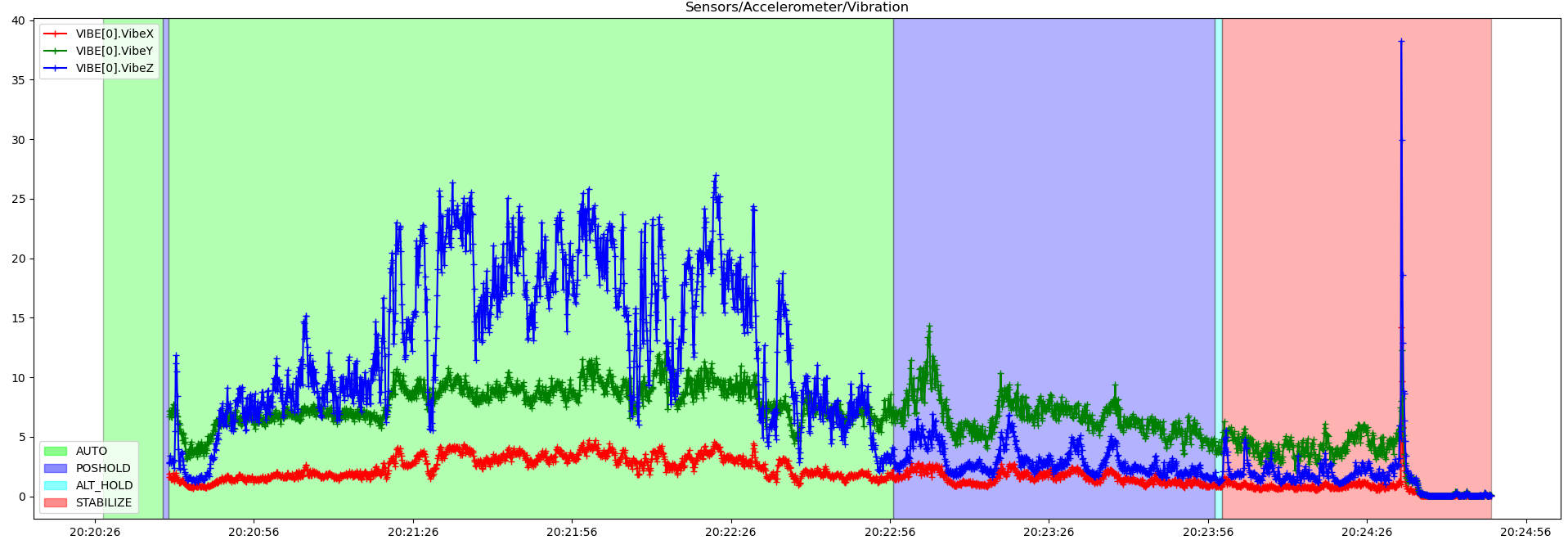
With these settings I’ve been able to fly 25 or so auto missions up to say 25mph breeze and the drone has performed well. The problem comes when yawing in auto and the drones response in auto - it seems to be hypersensitive and there’s obvious vibration (although the vibration performance is within the limits given in the wiki - in stabilise and althold vibrations are low imo).
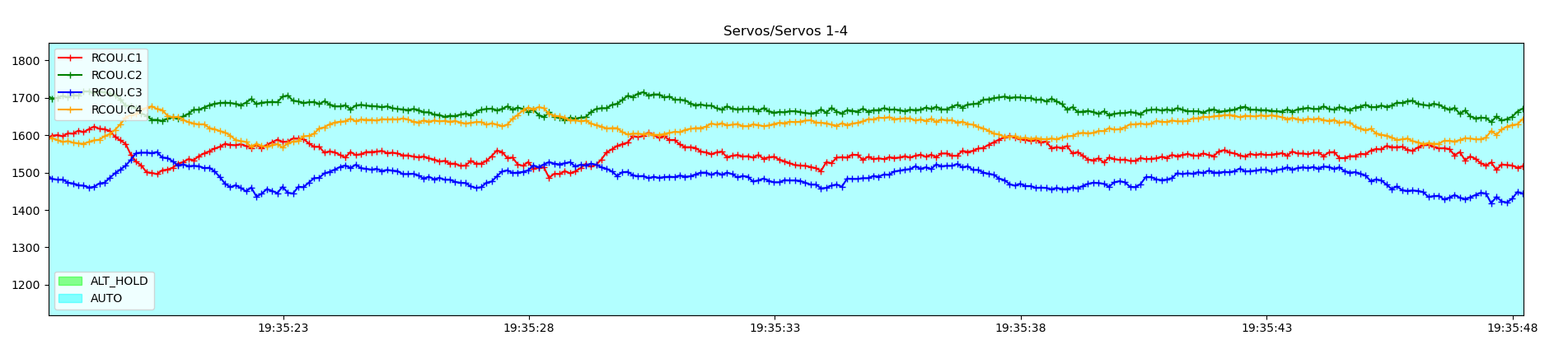
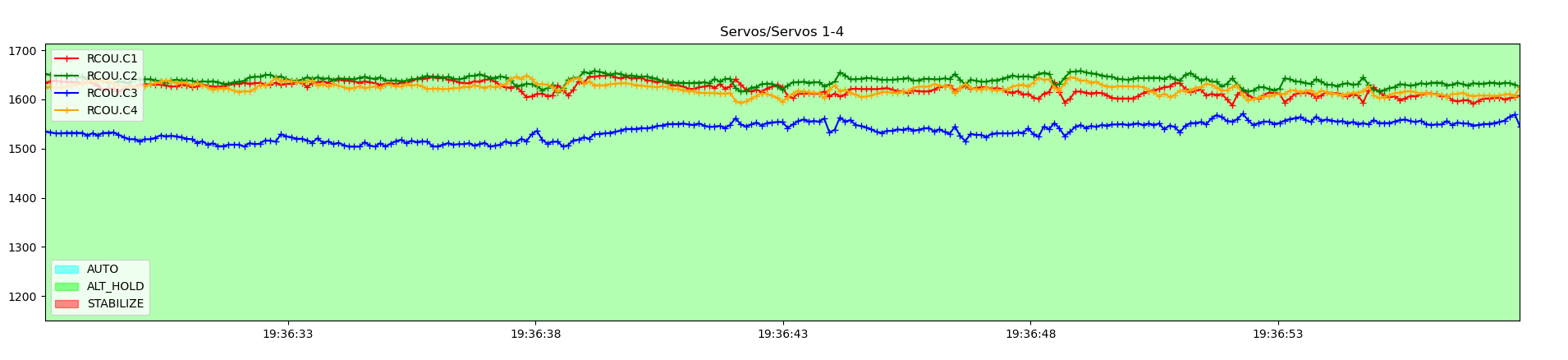
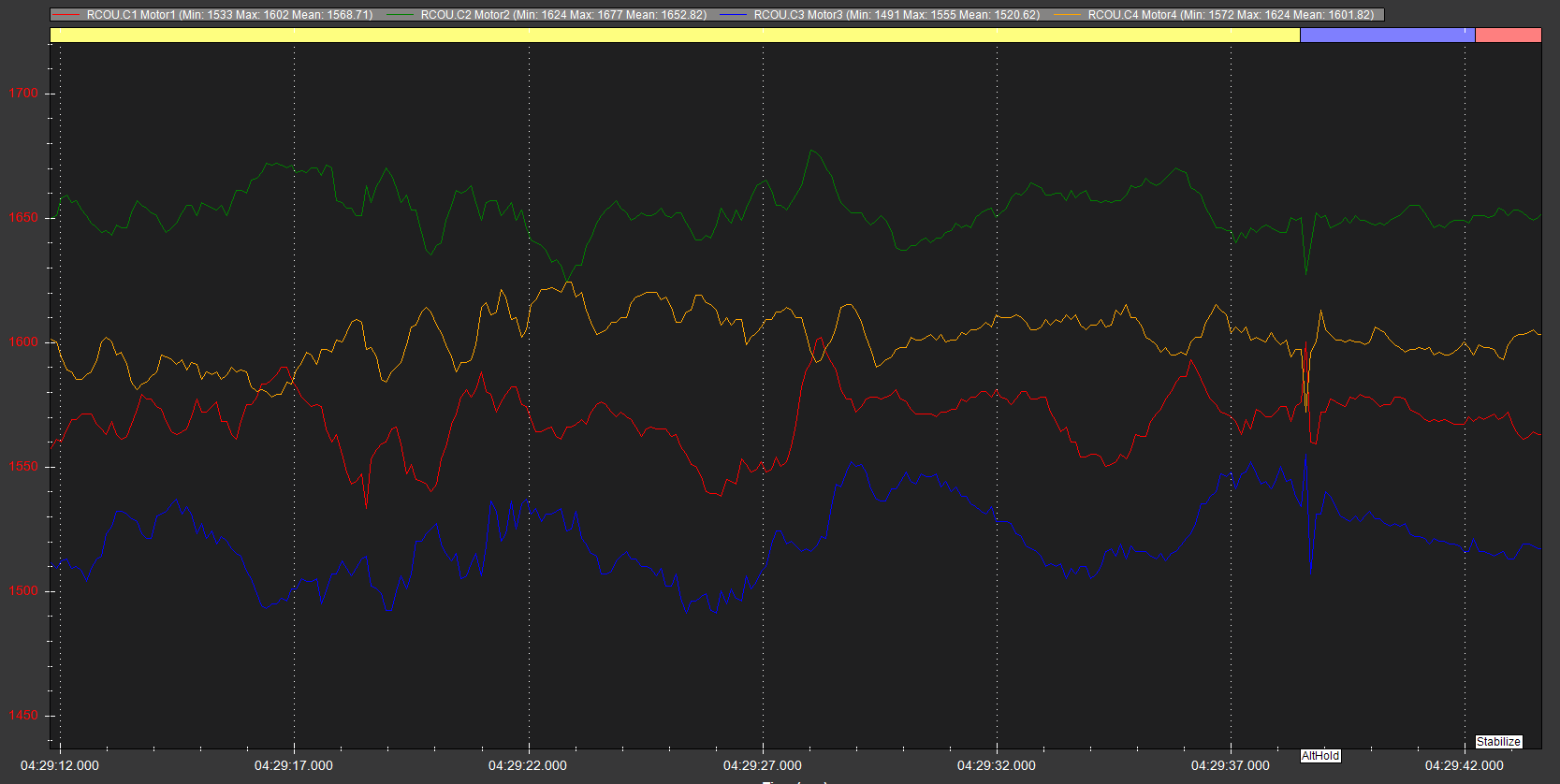
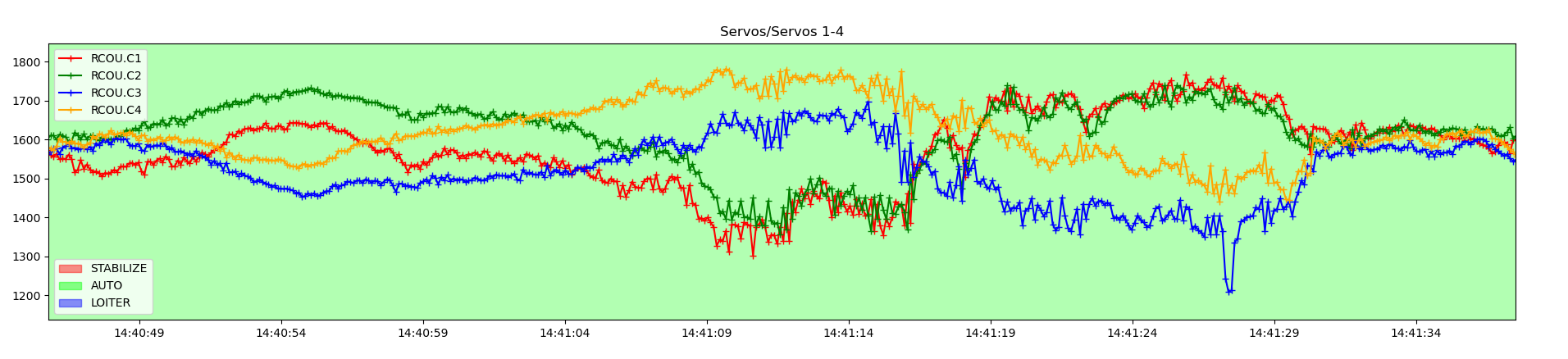
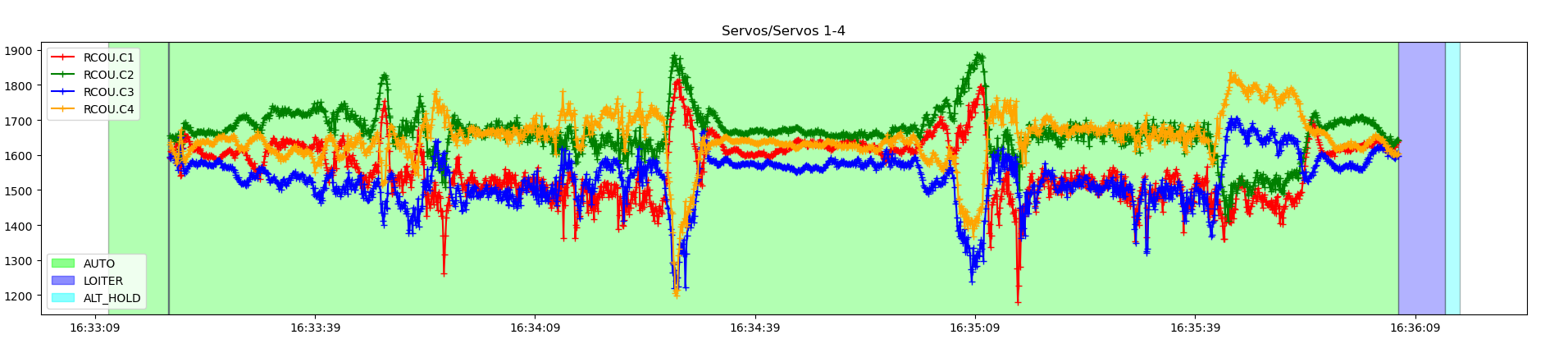
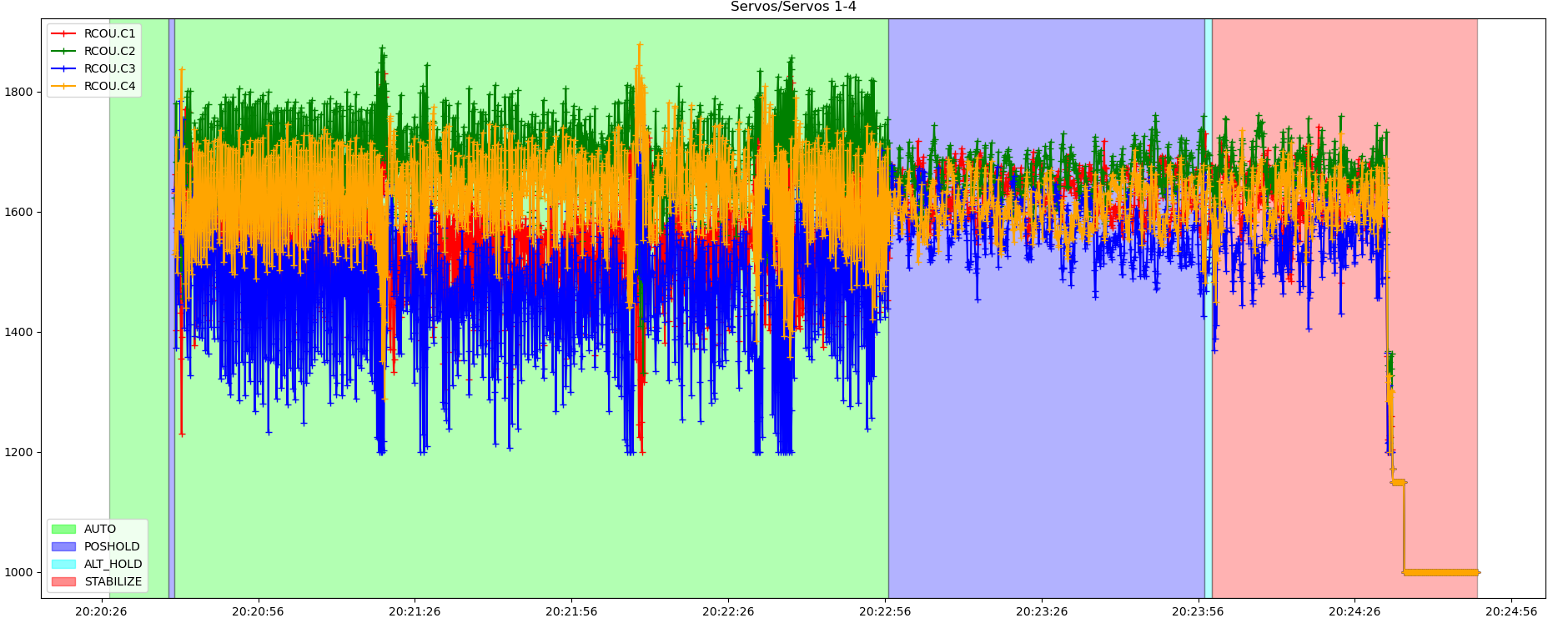
Motors don’t get overly hot and are all approximately the same temperature, however they are warm, and the rcout traces are extremely noisy and saturate at the low end as shown below.
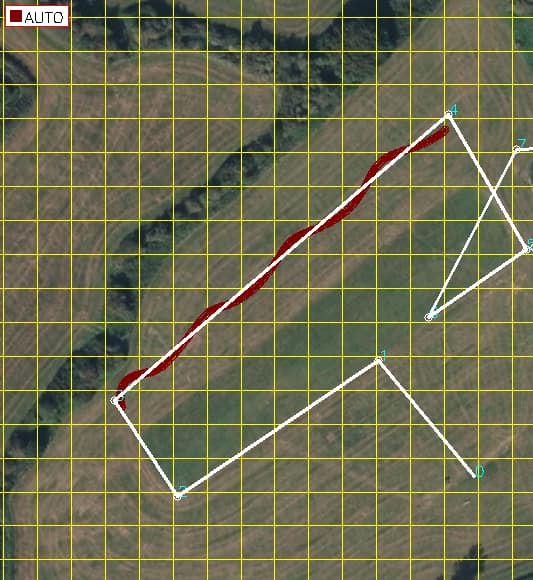
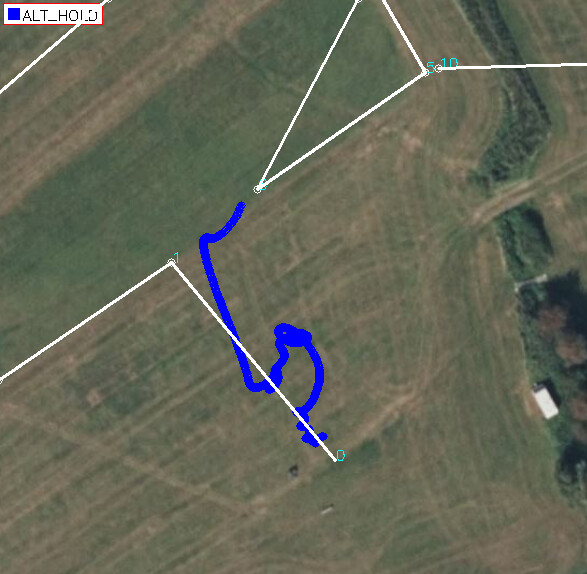
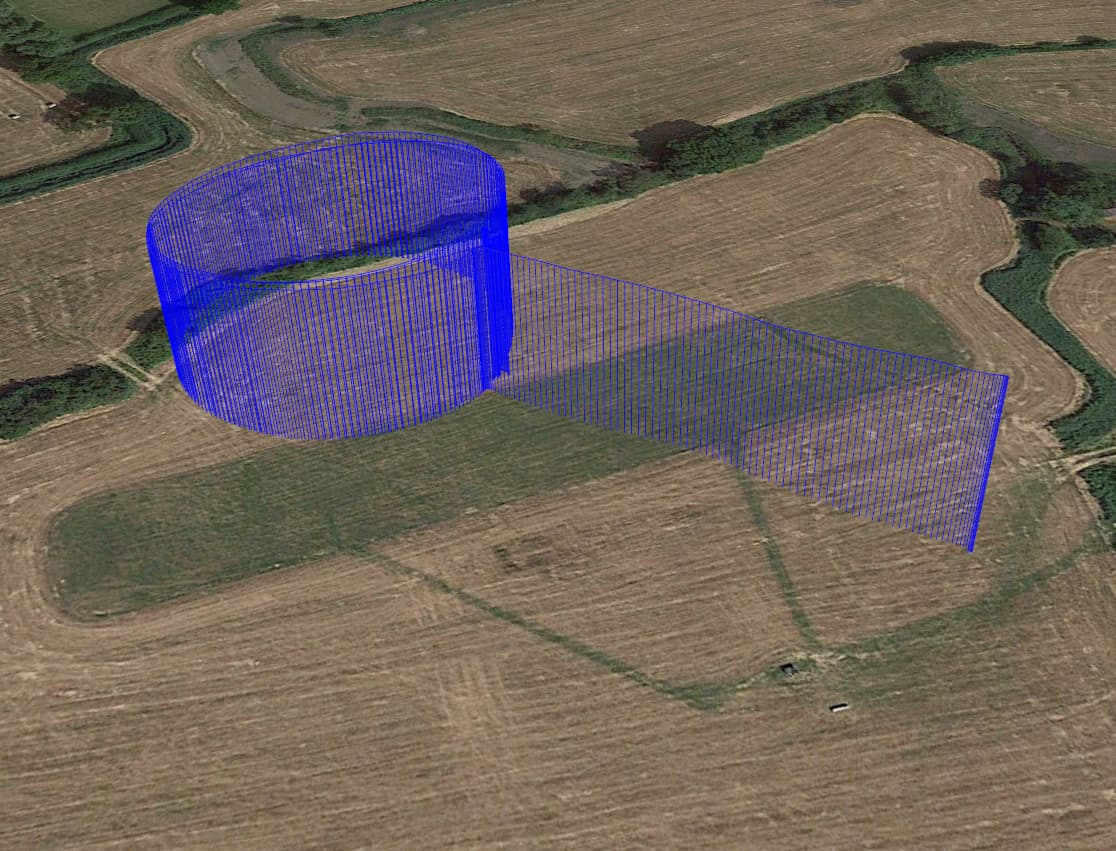
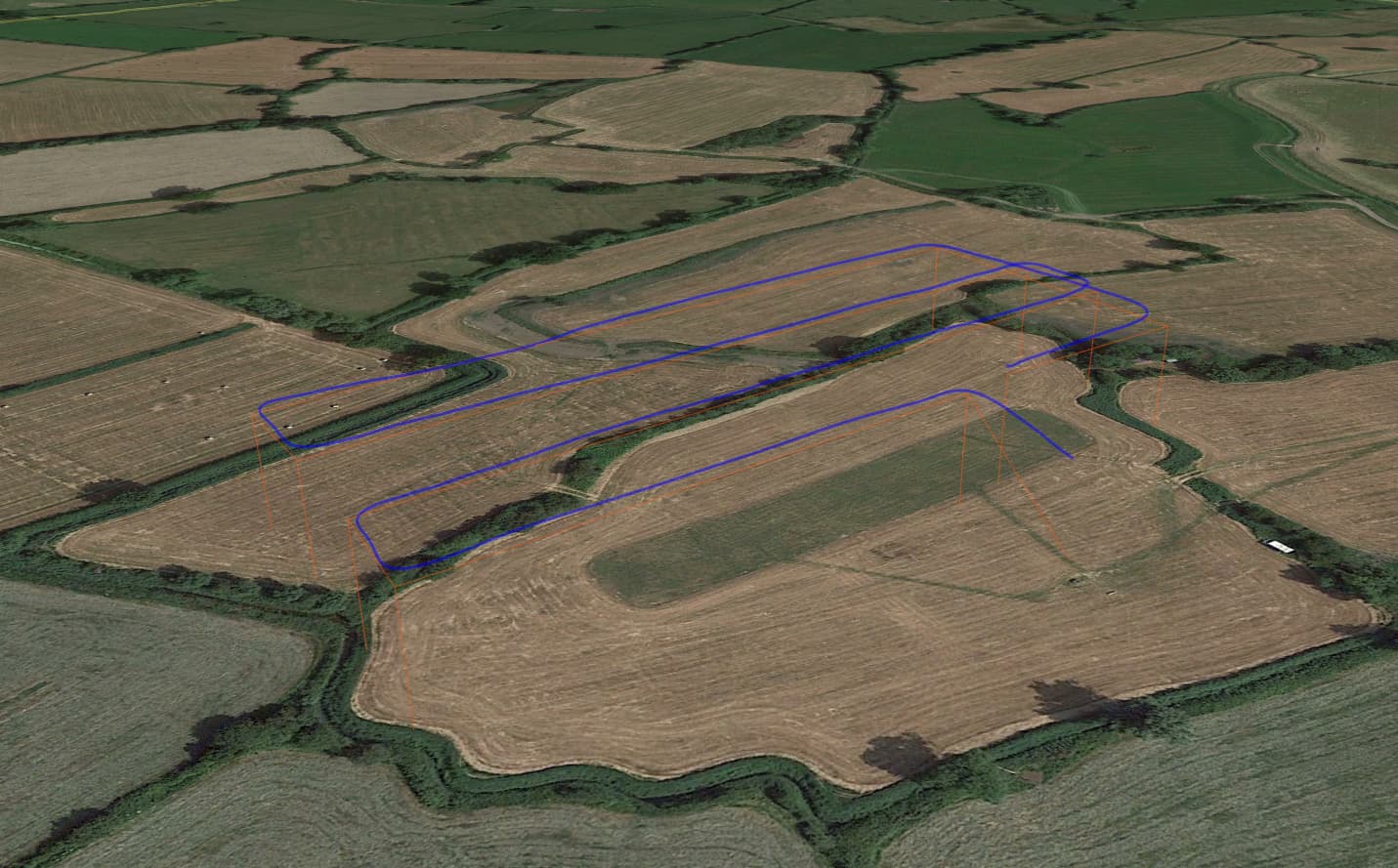
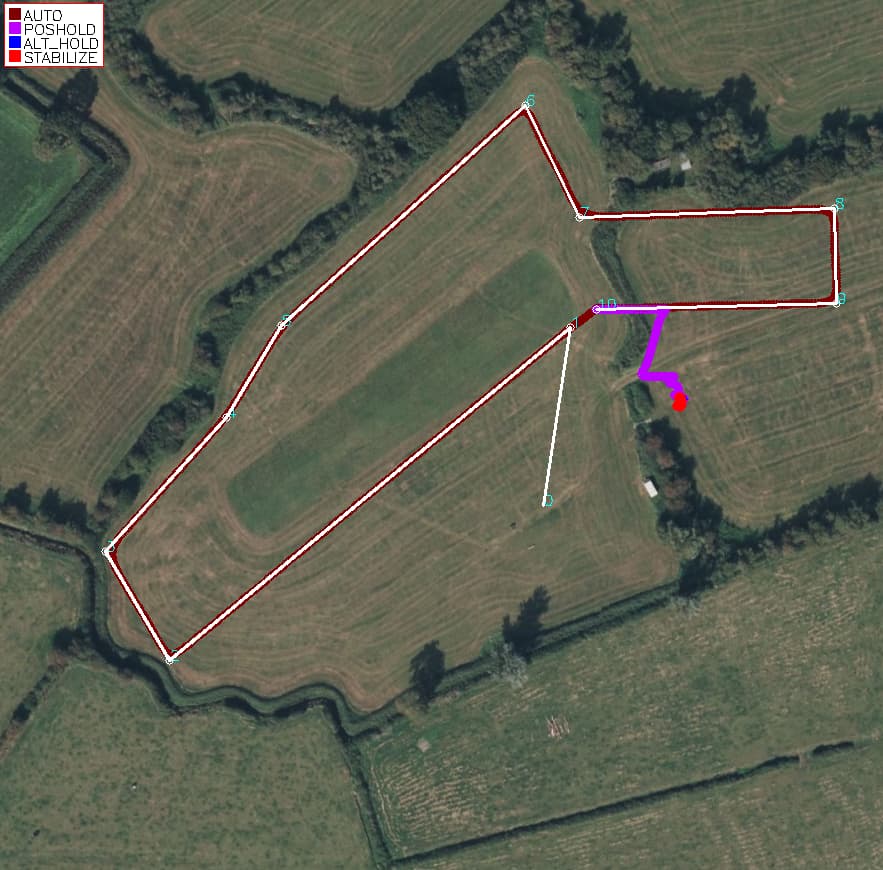
This is a section (last 4 segments) of the flight - one auto run around the route, some poshold, and stabilise where I’m flying the aircraft to land.
Servo1-4 out:
Vibrations:
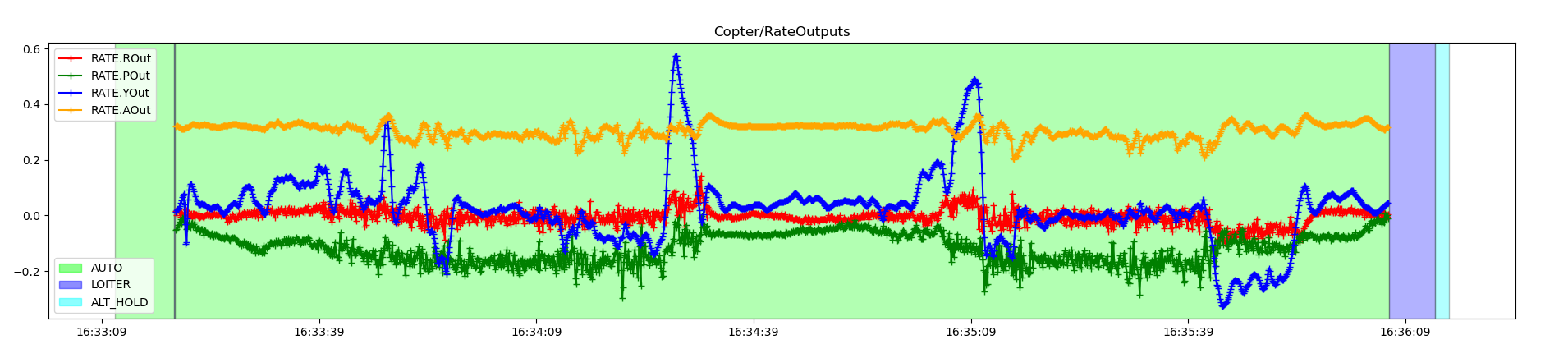
As can be seen, in auto the motors are being worked hard. This problem could be leading to poor yaw authority, and I wanted to get this sorted before working more on the yaw authority in auto mode.
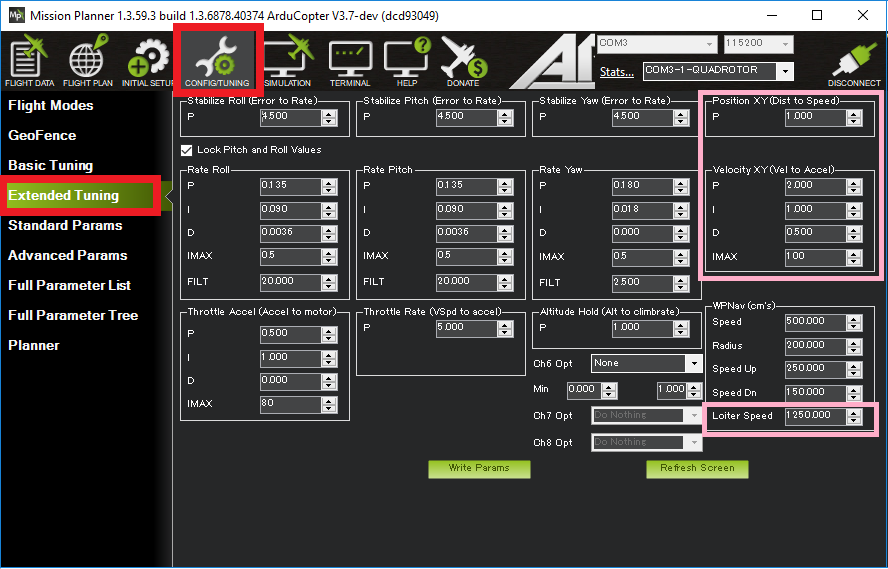
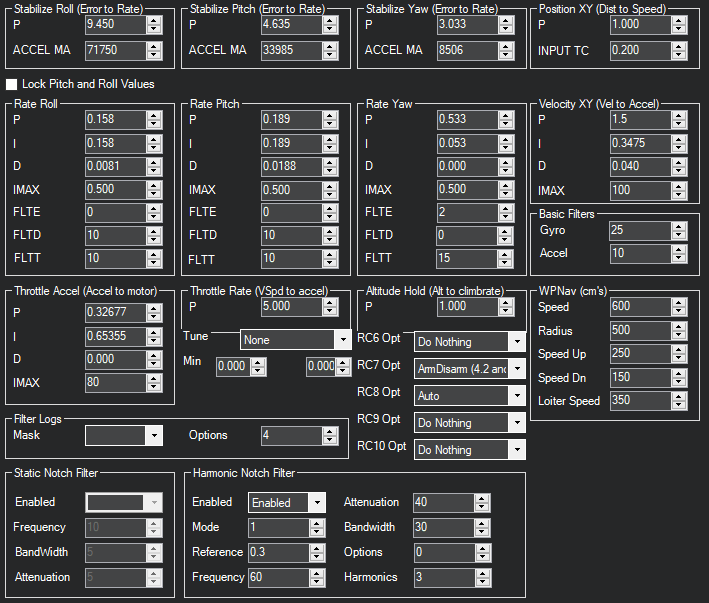
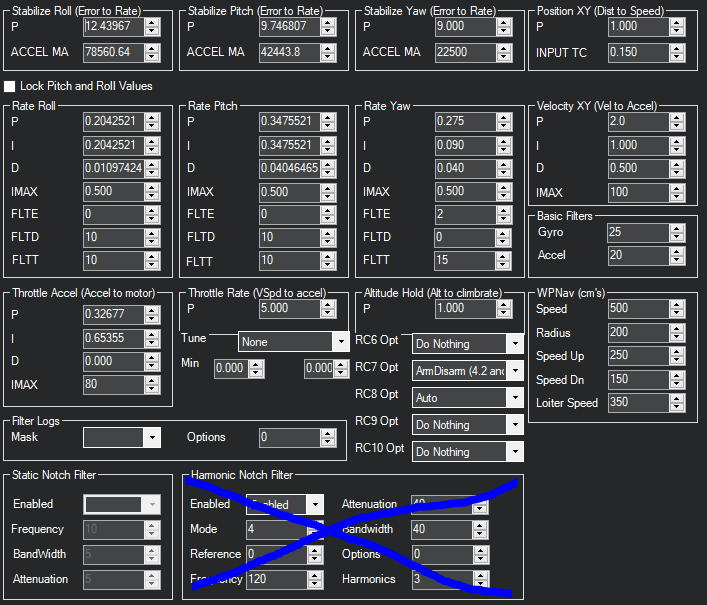
Here’s the extended tuning page from mission planner - please ignore the Harmonic Notch settings - I set those after this flight. The autotune didn’t really do anything with Yaw, so I added those parameters in. I will need to do autotune again on yaw I think. Yaw in stabilise is good.
Any help understanding this situation is appreciated.