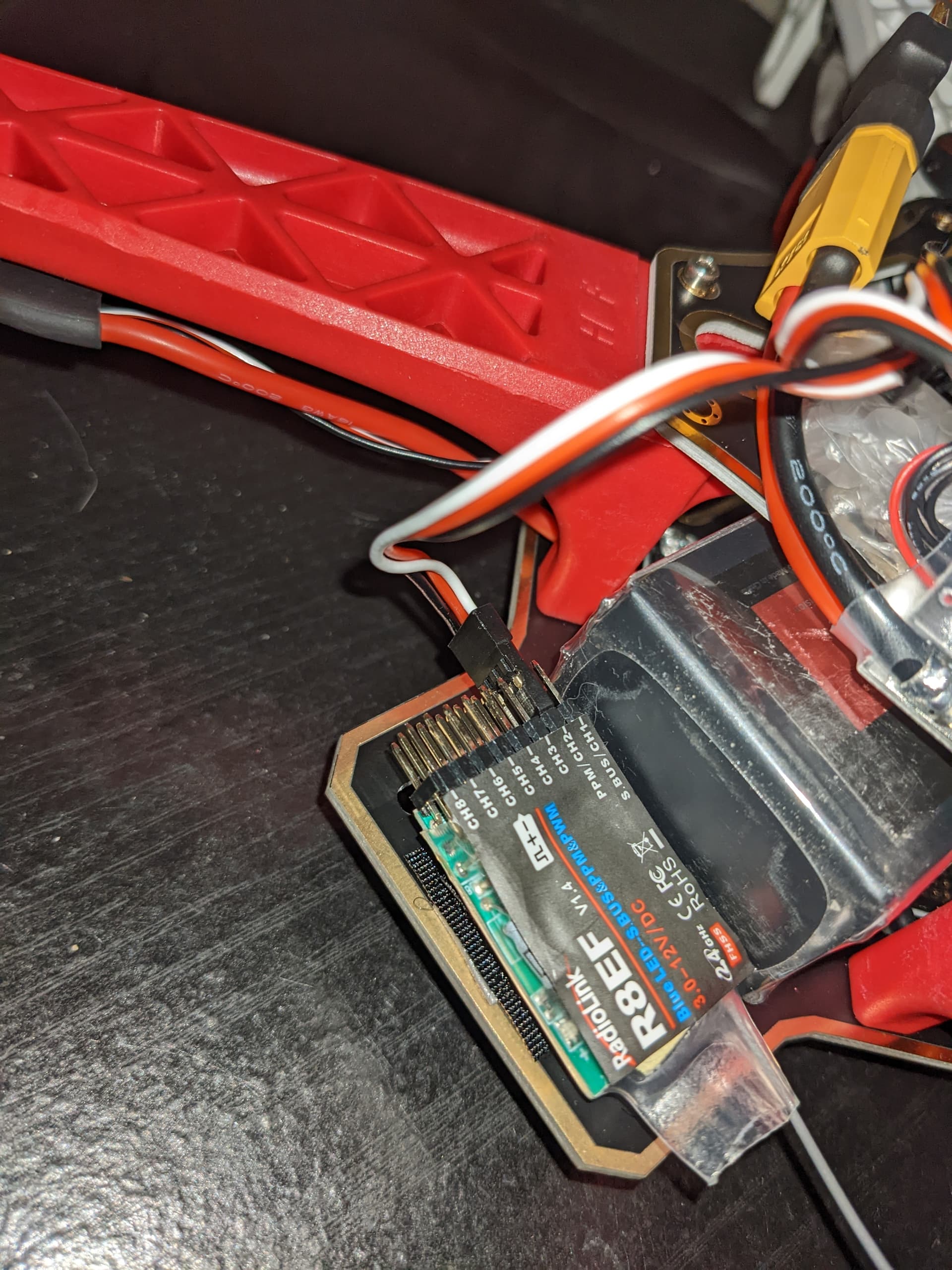
The PPM pins are connected to the Pixhawk’s RC pins in the right order (on receiver, white wire up, on Pixhawk, black wire up). I know the transmitter connects to the receiver because the light goes solid and I’ve tested the motors by plugging the receiver directly into the ESCs. I’m very new to drones so I’m probably doing something simple wrong, but I’m having trouble finding out what. Any advice? Thank you.
Edit: I figured it out!!! The receiver was not in the right mode. I started reading the receiver’s documentation and figured out how to get it into PPM mode.
I am now working on another problem if you have a moment
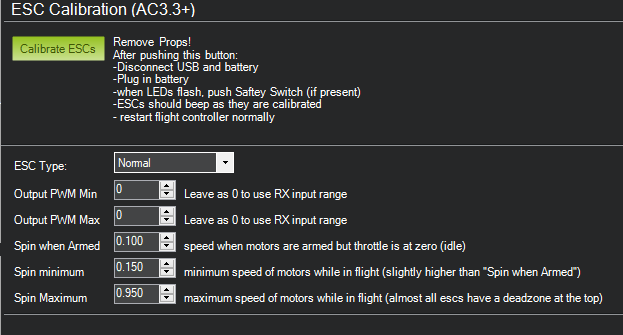
I have performed the ESC calibration but I’m still not able to get the motors to move from the transmitter. I’ve messed with the ESC calibration screen and might’ve messed up the settings. I’ve also tried to do ESC calibration the other way putting the joystick up, connecting the battery, disconnecting the battery, etc. but just nothing happens. I did exactly what the person in the YouTube video did with a different result. I’m just not sure what to do because Mission Planner is reading my transmitter’s controls but the motors seem to plain old just not move! And yes I press the safety switch so it goes solid.
As Allister aludes to, just do all the calibrations and things as you have, then use MissionPlanner motor test to check motor order and spin.
In that test when you do all in sequence, or select any individual motor, the test uses the LETTERS not the numbers
You might need to set these to avoid using the arm/disarm safety switch - somewhat misnammed because reaching in amongst props to get to a “Safety” switch may not be very safe!
BRD_SAFETYENABLE,0
MOT_SAFE_DISARM,0
The theory being that if there’s RC input and motors work in testing, then it stands a good chance of flying. Using the RC to directly control the motors doesnt work as expected and often doesnt work at all.
Without props on, you can arm in Stabilise mode, apply a small amount of throttle. Holding the quad by hand you should be able to pitch and roll gently and observe motors on the lower side speed up (to lift that side if they had props on)
Thank you for the help. I hear tones from all the ESCs when I plug in the battery. But nothing seems to happen when I try ESC calibration using either method (from Mission Planner or the transmitter). I feel I must have messed up the settings for the ESCs like in the image I posted above.
set the Output PWM min and max to 1000 and 2000
Actually check in the full parameter tree to see if they already are.
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
it should be like this: