As hobbyists, we (@walter and me) are not yet sure if we will build a three-engine Transwing VTOL. Therefore we first made a “proof of concept” model and want to introduce our considerations:
From our point of view, the main advantage of Pterodynamics Transwing VTOL is when hovering against the wind, the wing surfaces do not generate downforce but even lift! This is a unique feature, because all VTOL types with transition-stable fuselage generate considerable downforce when hovering against wind. But there is no light without shadow: A single pivot joint must hold the wing in place.
Since four motors are luxury for the forward propulsion anyway and to reduce the forces on the wing, we planned only 2 motors (one motor per wing). A third motor is therefore required at the rear, like a tricopter. The model is used to quickly change the linkage geometry and to test the control electronics.
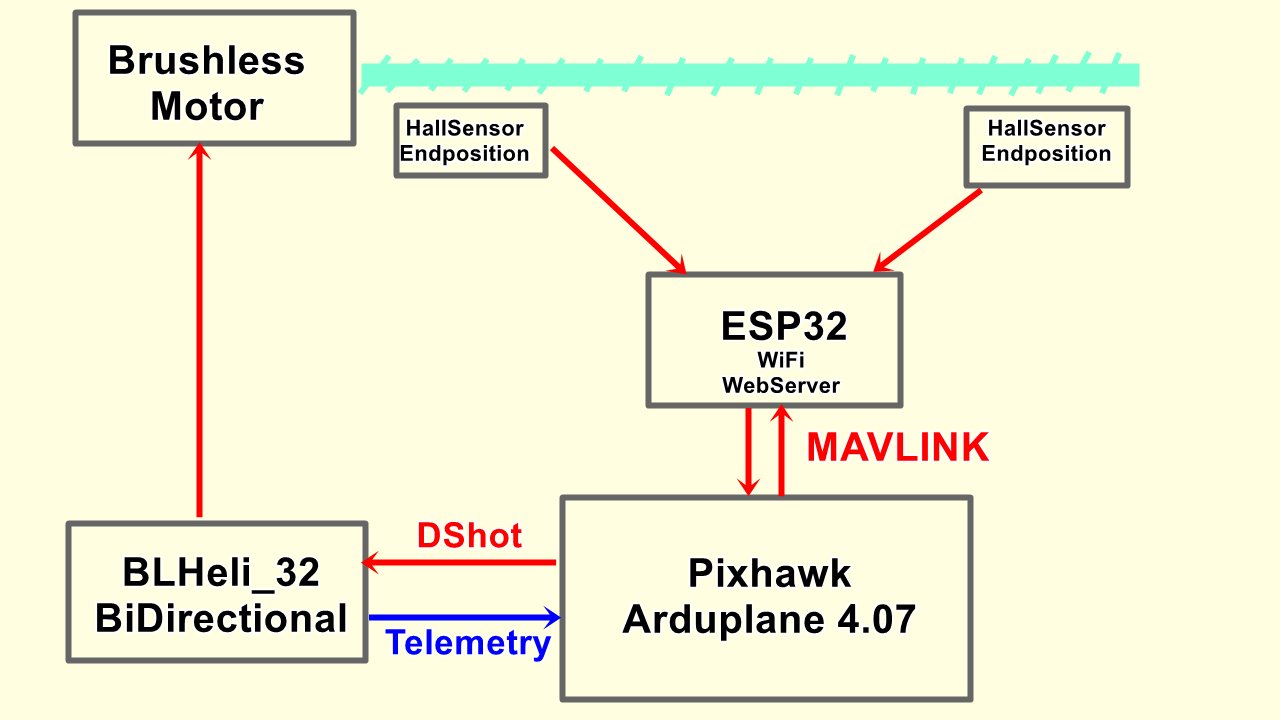
The linear actuator is controlled by Arduplane using an ESC32. From Arduplane’s point of view the linear actuator behaves like a normal tilt servo. The ESC32 runs an Arduino Sketch, which is connected via Mavlink. The position of this “virtual” tilt servo is communicated to the ESC32 via Mavlink. The ESC32 now controls a real servo output on the Pixhawk via Mavlink, which control the brushless motor in both directions via DSHOT - BLHELI_32. Telemetry outputs RPM and current. The stop switching at the ends of the linear drive is done by 2 Hall sensors.
Even if we are not sure yet if we will realize a Tri-Mot-Transwing, we wanted to present the idea of a “TMT”. Maybe someone has already finished it or it inspires someone to build it.
Thanks for showing your concept for the TMT. It reminded me of the CL-84 wooden tilt-wing mechanism from years ago. I saw Tridge’s SITL video just the other day on his Pterodynamics Transwing VTOL project. It is indeed a strange design. Good luck with your research!
I have been leaning towards designs with less mechanical complexity like a quadplane versus a tilt-rotor and snap-on wings or tail for tool-less setup and breakdown. The HEQ Swan K1 H-WING VTOL has excellent break down capability and seems to eliminate all mechanical control surfaces. We need a hobby-grade version that isn’t so expensive. Much like the Pterodynamics Transwing VTOL, these designs are meant more for commercial markets so your hobby version design of the TMT is very interesting!
I also had the CL-84 in mind, especially the tilt control via binary servo function. I just want to set Q_FRAME_CLASS to 7 (Tri), Q_TILT_TYPE to 1 (Binary Servo) and Q_TILT_RATE to the duration of the spindle run and will see how Arduplane controls the aircraft during transition.
Interesting, the HEQ Swan K1 H-WING VTOL is a QUAD X motor tailsitter ( Tailsitter Planes — Plane documentation )
You could build this from a Z84 by pushing a carbon fiber rectangle bar vertically through each wing. Let’s see.
Ahh, yes, the Copter Tailsitter configuration. I have thought about using the XK X450 frame. All the parts are available and inexpensive. My hesitation is in creating a design that does not disassemble easily like the HEQ Swan K1 H-Wing VTOL. Perhaps if I am patient, XK will design an inexpensive H-Wing for us. The X450 shown below has impressive performance and flight times for around $115 shipped. It can take-off both vertically or horizontally and flies very well but it is not autonomous.
Seems that you have been using the x450 for sometime. I’m looking for a inexpensive VTOL solution for development. I’ve looked at some pictures of the esc and would like to change only the FCU for a PX4 compatible one with a wifi telemetry. Do you think that it can handle the weight (around extra 30g) for takeoff and quad/plane transition ?
Hello @Rolf I really liked this project you made and I want to do it at home. Can you send me the stl files of the parts you used in the wing mechanism?
Dear Rolf,
My name is Anas, and I am a mechanical engineering student working on a UAV design that incorporates a transwing mechanism similar to the one showcased in your impressive prototype video.
While attempting to integrate this mechanism into my design, I’ve encountered some challenges with the hinge geometry. Specifically, I am struggling to ensure that my wings transition perfectly from a horizontal to a vertical position. Despite my efforts, the rotation of the hinge does not result in the wings being perfectly vertical.
Given your experience in this area, I would greatly appreciate any advice or insights you could offer on how to resolve this issue. Your expertise in this field is truly inspiring, and any guidance would be invaluable in helping me refine my design.
Thank you for your time, and I look forward to hearing from you.
Sadly, I have no more files (because a few weeks later, in July 2021, my workshop with many planes and also the parts mentioned above and comuputers were completely submerged in a flood).
At the time, we were able to work out the angle of the joint relatively quickly with a little turning in the CAD programme.