Alan,
I don’t think you got enough I-gain in the rate controller to get a helicopter to track properly in auto. I run mine up around 0.32 and I’ve run 'em as high as 0.5 before. I run more I-gain in flybars than you have in a FBL.
And your rate P’s look pretty low too. The helicopter is wandering on the y-axis in the position controller in auto, not staying on track.
I wouldn’t doubt it. It takes more power to spin bigger blades. 4500 12S is barely enough to get 7 minutes out of a typical 700-800 class machine. Most UAV helicopters that size in electric are going to have 10,000+ 10S power. And at current, you’re not flying fast enough to get the power consumption down. You have to get up to 20-30 kts before the efficiency of the helicopter is going to increase.
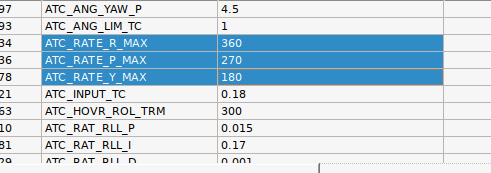
@Alan.h if it were me I would get rid of these by setting them to zero. Set those later if you wish to limit max angular rates
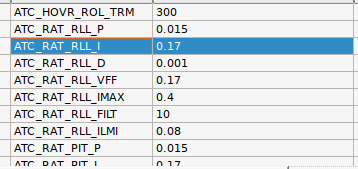
I think you’re over-tuned on VFF for pitch and roll, I would drop those from 0.17 to 0.15. I would set the ATC_RAT_RLL_I to 0.32 and ATC_RAT_PIT_I to 0.35
I don’t know what the deal is with your ATC_RAT_xxx_P’s being that low, but it looks pretty soft for a big heli to me. I run a little more on roll than I do on pitch in helicopters that size, but usually those are around .038-.040 for roll, and around 0.035 for pitch. But don’t change them right now, don’t want to screw up your carefully tuned helicopter here.
The final thing is, where do you have the GPS receiver located on this thing? Is it in close to the frame, or do you have it way out on the tail someplace? I don’t like the inconsistency I see in the GPS solution, like the receiver is getting the living daylights shook out of it. When you put that long tail boom on there did you put extra bearings on the driveshaft to the tail? While it don’t matter for 3D flying, for UAV’s in heli’s that size I use three bearings on the tail driveshaft. If you didn’t do that on a big helicopter that driveshaft whips all over the place in there and will shake the living daylights out of your GPS unit. And you’ll see a noticeable visible vibration in the tail boom.
I put the 2 bearings that it had on the drive shaft. It only had 2 rubber mounts in the old tail so that all I had. I set them at 1/3 and 2/3 down the tail. I see a pretty aggressive vibration on spool up but once at rated speed looks smooth. GPS is mounted 4 inches down the tail from the body of heli. I will get another rubber mount coming. This heli has always had a vibration around 1000 rpm. I have new main shafts but did not install it. The old one seamed straight I suppose it could be a thousandth or 2 out of straight. I can get a dial run out gauge and check it some time.
We tuned the heli and the low rates concerned me but it is the only way to keep osculation to a min. Ardu in qground says to have them at .08. If I go above .04 it is flat Scarry. Oscillations.
I will try to tighten the mount up on the GPS also.
Well, that is not right. What sort of mount do you have for the controller and where is the controller located? How did you do the blade tracking? The bigger they get, the more critical it is to have a properly tracked main rotor. When doing manual tracking I usually mark one pitch link with a magic marker to make sure I’m adjusting the right pitch link every time, and have spent sometimes 2 hours fiddling with it to get the tracking perfect.
After I found out we can use the DynaVibe to track the rotor on RC heli’s I now use that. But using the DynaVibe with all the wires hooked up is a 2 man operation.
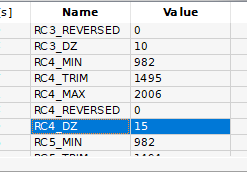
Also, increase the RC4 deadzone to 40 or it will cause unwanted yaw inputs in auto flight mode. You can control yaw from the RC in auto. But cyclic or collective will not respond when the auto flight mode is engaged. 15 is normally too tight for most radio/receiver combinations.
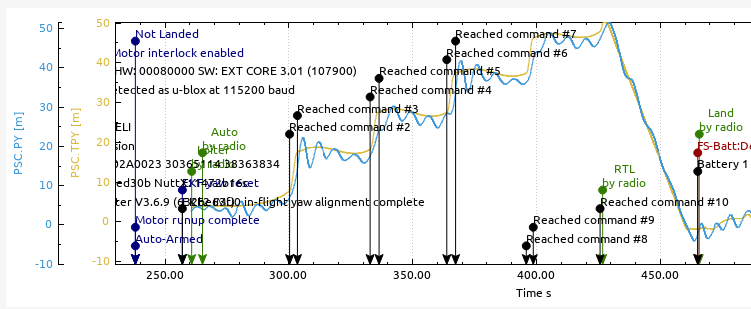
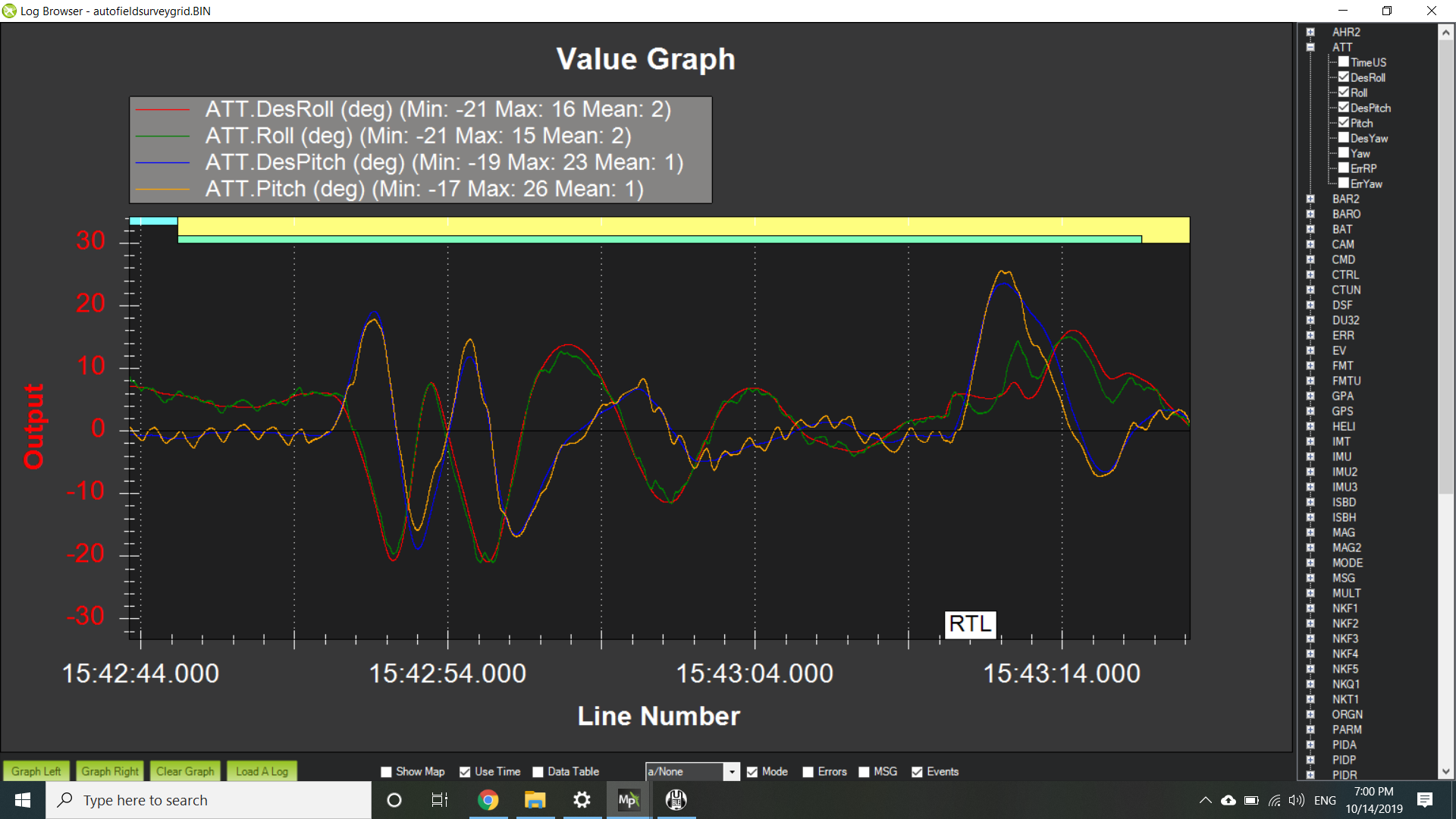
I looked at your other log with the auto-survey grid. And PSC y-axis wanders all over on that one too.
For whatever reason, this helicopter appears to be HIGHLY unstable in auto. It is pitching up and down, speeding up and slowing down, rolling right and left, and yawing right and left, making a zig-zag course over what is supposed to be a straight line. And the desired and actual attitudes don’t track - they kind of do but the helicopter is badly oscillating in both pitch and roll like the controller doesn’t have a single clue what the frame is doing.
That’s why I’m wondering what the controller is mounted with? It is on some sort of soft mount that isolates it too much from the frame? Or you got filters set wrong so it’s filtering out critical need-to-know information to properly stabilize the helicopter?
I don’t know if it’s a mechanical problem or software. If you’re not sure, take the ArduPilot system off it and put an old BeastX on it or something and try flying it with that. If the Beast won’t fly it, nothing will and it’s got some serious setup problems mechanically.
You described the flight exactly. It was drunk not even straight or pointing the correct direction. I had hover speed set to 25 I think and max speed on log was 6. I have the controller in the battery bay. Facing rearward under the gears. The factory mount isolating plates are mounted to a rigid rubber mount I made.
We still have the 3gx it came with but no nothing about it. We never even tried it.
The heli was tied down solid with the main shaft leveled vertically. We leveled the swash with a pitch gauge adapter. Then the pitch gauge was put on the blades and rotated by hand to fine then the swash with servo adjustments. Until we had .01 pitch variation or less thru the rotation. Both blades got that. When hovering in stabilize at eye level the blades look like 1 line. We tried to do our best but never done this before also.
Iv watched your heli videos time and time again and never see any vibration on your spool ups. Always wondered how you got it that smooth.
I will go thru your list and try to correct my blade tracking. I will try to make the mount more rigid or at least check it over again.
Alan,
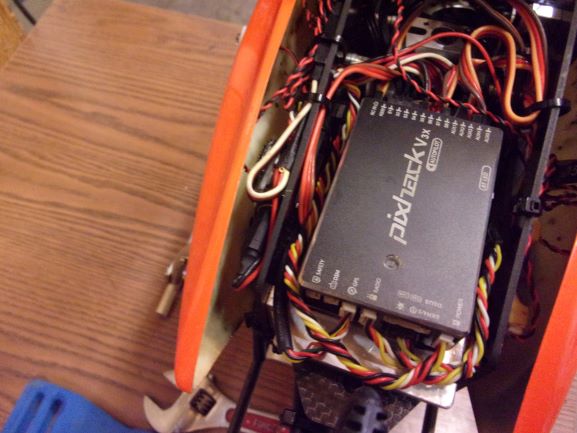
I would say show Chris a photo how you mounted your flight controller. I believe that could be the problem of that kind of Heli bad behavior.
I got my Helis always flying very well with ARDUCOPTER after sorting out any problems.
Just last week I did a 12 minutes video over a Tree Nursery.
A short 6 Minute version of that I put on YouTube. That video has been rendered in a hurry so you see some small camera wobbles and bad transitions which can be taken out before rendering. But look the Heli did fly very smooth all the way.
If you are interested to see that click the Link; https://www.youtube.com/watch?v=jMqtycpIVgo&t=11s
If you want to see a few more click on - F GO.
Good luck with sorting out your problems.
Mine have been balanced and tracked with a RPX DynaVibe, which is used on full-size helicopters to track and balance the rotor. It can be accomplished without the tool, but it takes a lot of fiddling to get them that smooth.
I’m at a loss because I’ve never seen one wander like that in auto. They will fly bad and not track properly if it’s not tuned right. But I’ve never seen one do what yours is doing. Like Fred said, a photo of the controller mount might help to see what’s going on. Because it does act like the controller doesn’t know what the helicopter is doing until after the fact.
Alan, if I remember correctly didn’t the servos on this helicopter shake and oscillate right on the bench before you ever even flew it? I remember there was a setting you had wrong. But now I’m wondering what sort of power supply do you have to the servo rail, and at what voltage? And what servos does this helicopter have? And where is the telemetry radio located?
I have seen 900 MHz telemetry radios make servos go absolutely nuts before.
I disagree with these tuning recommendations. For this flight, the actual aircraft attitude follows the desired attitude pretty closely as shown below. There is some oscillations but in my opinion these 1 hz oscillations are not causing the “drunken” behavior in the auto flights.
Chris, these were set based on tuning completed with the heli before the crash however these could be explored again with the rebuilt aircraft to see if more P or D gain could be used. That could help the oscillations seen in the attitude traces. @Alan.h With the rebuild of this aircraft, it sounded like there were some changes from the original aircraft (blades? tailboom length?). Since this aircraft had been rebuilt, you may consider exploring the P and D gains.
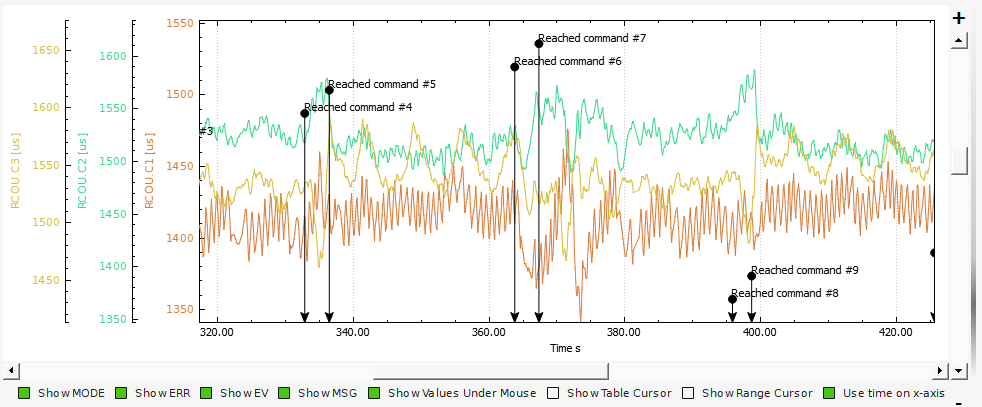
You could consider add some amount of PSC_VELXY_D to help make the PSC.TVX and PSC.VX signals match and the PSC.TVY and PSC.VY signals match. Increase the gain slowly and be ready to switch out of loiter if the aircraft gets into an oscillation. Probably want to use 0.1 increments. Don’t go any higher than 0.5. Hopefully you will start seeing better performance in the tracking of these signals.
Sbec by yep 20 amp set at 6 volt. Align ds610 servos. My Pic show. The Computer 3dr radio on below right side back. 8xr receiver back side left below heli. GPS bound and glued solid 3.5 inches down the tail. ESC and sbec on the nose we separated all wiring to get rid of any rf interference when. We were having trouble in the beginning. We had huge osilations on the bench without and with blades and heli Mounted solid . it wasn’t till bill set me straight on the tuning. I was listening to the warnings in the program and they said min on rat xxx p was .08. That was causing the osilations as soon as we dropped to 0. The heli flew for the first time since we bought it. We tried all the params you sent from your helis and for some reason this v3x has to have the rat settings below .04 forgive me if I used the wrong termonoligy I’m going off memory right now giving kids a bath. I appreciate all the help everyone has given me. I don’t like being a problem. Must just be my luck.
I agree and will test out new blades and tail on p and d gains.
Do I need to remove the notch filter to run these tests again? Also.
Wondering if I am way below weight. I weighed the heli 12 lbs with 2 6s battery’s. Do I need to add more weight I’m guessing I will be flying with 15 to 18 pound with gimbal and sensors and another 12s battery for test flights. This will surely affect the gain oscillating.
With regard to speed of auto flight when and providing I get this all checked. The speed in the flights was set to 22 mph I never have seen the auto go over 6 mph. Is that the ang limits Chris was talking about that won’t let it increase speed?
@Alan.h so I forgot you have a 500mW 3DR style telemetry radio. I’ve seen the 100mW ones make servos dance before. I would suggest unhooking that telemetry radio and try flying the helicopter without it. See if any problems go away, like dropped packets to your RC with late telemetry on that? Jumpy and squirrely servos, etc…
If that telemetry radio is causing common mode on your servo and electrical wiring it can wreak havoc. Look at the amplitude of the servo output to servo#1. It is totally not normal. Servos 2&3 look normal. I would guess that’s where your oscillation is coming from. And although I can’t find your email right now, it seems to me Servo1 was the one that was jumping and jittering on the bench all by itself. I thought you had sent me a video of it doing that.
It is possible that telemetry radio could be causing RFI problems in the controller itself. I would definitely unhook it and see if this goes away. The helicopter can be flown just fine without that telemetry radio to test it.
That would be great news if it was that easy. We have always had it connected. That may be why my rat gains have to be so low. We will see tommorow after 5. I have hope again. That makes sense in my mind. Since I know gains are set low I will save my params. Then adjust them up to at least .05 according to my notes to see if oscillations return with radio unplugged.
From your photos I think I see one of those blue rubber ball “jello plates” that the controller is mounted on. Those are less than ideal for helicopters. They let the controller move too much and when the frame is going left the controller’s mass is going right. They definitely damp vibration getting to the controller, but they have an adverse effect. If the controller can’t sense what the frame is doing because it’s too far isolated with those soft rubber balls, the helicopter will never handle decent.
The V3x controller has internal IMU damping and it does not need that jello plate. I screw an aluminum plate to the FBL unit tray because the tray has holes in it. The controller is stuck to the plate with two strips of Velcro on the front and rear of the controller. That’s it. On a piston machine, no less, and it has flown 100’s of hours that way.
I remember the first time I mentioned I had done that, somebody about blew a fuse because I was going against all the methods and research used in the wiki to isolate vibration. I’m like (shrug), it works and I’m not flying a Pixhawk 1.
We read all about isolating the vib . we designed a rubber mount and installed the factory " jello plate". We had Velcro on that for the controller but gave up on the Velcro seamed to move to much fighting the huge beginning osilations. So we zipped it to the jello plate. We put it under the gears in the battery hold to get as close to centerline as recomeded by the wiki. And to protect it from crashes. That part worked well so far. My heli has a sloped spot behind the main shaft where the ESC was that the only open location besides the battery hold I have to mount it unless I just strap it on the side of the frame.
If it is the radio. Do you think it is a back feed problem or an antenna problem. As extending the wires and moving it to the tail fin would help. Or just buy a 300 radio like you use. We were going cheap just to test and learn. Probally bit us in the butt. Lol
This is quite possible and would be good to rule out but in my experience with RFI, it is typically seen just sitting on the bench so I’m not sure why it would only happen while the aircraft is flying/running.
this is a very good catch. I had tried the jello plates once with a pixhawk 1 and I do remember getting oscillations at low frequencies I didn’t expect.
I know Chris likes this setup but I’m not a big fan of velcro holding your flight controller down. I recently mounted my V3 with thin rubber foam double sided tape. I am seeing more high frequency vibes coming through than I saw with the 1/4 3M foam that 3DR sold with the pixhawk. Which was the controller I had on this machine before putting the V3 on it. So how you mount it is up to you. but I think the jello mounts could be part of the problem. I’m not saying it will get rid of all of your vibes but I think it may help you raise your P and D gains to what we typically see on heli’s.
Leave the notch in. I can still see the 1/rev in your signals.
In my opinion, I don’t think that the radio interference is the issue but I think there is a good possibility that the mount is part of the problem.
Actually, the wires going to the radio can cause problems too if that wiring runs parallel with servo wiring. None of this wiring is shielded. Those cheap Chinese radios don’t even have an RF cage on the transmitter final stage. So what causes RFI is wiring picking up common mode currents from the electromagnetic field produced by the radio.
You can sometimes kill common mode currents with ferrite torroids on servo wiring. Some ESC’s and BEC’s come with a ferrite torroid on the servo or power output lead. But the internal circuitry in the controller is not shielded either, and the aluminium case is not grounded. The best thing to do is unplug the radio and try it without it running to eliminate that possibility. If it is the radio getting a different higher quality unit will be the likely solution.