That looks like perfectly reasonable tail settings for a smaller size heli. The tail response depends on a lot of things beside servo speed too. Headspeed (and associated tail rotor speed) can affect it. And 3D pilots are always trying different blades to find the “perfect” combination. And on some you can change the gears. On my Synergy 626, for instance, I reduced the tail rotor speed by swapping out the 4.5:1 gears for 4:1 in the tail transmission. Then replaced the stock 96 blades with 106’s. That simple change reduced the required power in hover by ~45 watts and actually improved the tail response.
So. Long story short: Looks like the real culprit of all my compass trouble was actually the pixhawk unit I was using.
It would not recognize any of my new GPS’ (A Here GPS and a mRo unit), so mounted a different pixhawk and after a lot of faffing. (The Here GPS has some quirks too), I finally got it working pretty much flawlessly today.

GPS was solid. Compass was solid. Tune is decent. Gimbal and FPV Pan & Tilt is working. (And more or less synced).
Needs some wiring clean-up, but I have yet to decide which connectors to use for payloads.
Need to get it out to larger area so I can stretch it’s legs…even 5 m/s looked too fast for that area!.
This post is very helpful. However we have a step by step mechanism to tune the roll and pitch which is well documented here. I think it would be great if we can come up with a similar mechanism for yaw as well. The guide lines mentioned here are fine but every heli is different and there a variety of factors due to which we cannot use prefixed values for yaw tune. I will do some experiment and see if we can have yaw time mechanism which would work on a variety of platforms.
I would recommend using the same procedure that is currently used to tune pitch and roll and see if it is any better or worse. You may want to keep a little P gain in there during the initial steps to set VFF. If you have some P gain then you are looking at the point when the P contribution to the PID reverses to reduce the amount of input. That then tells you that you have enough VFF. Then tune the P and D gains as is discussed for pitch and roll. I have tried it but I’m not as critical of my tail as most so I would like to see what others think.
I don’t know if this threat is still alive but here goes anyways.
I’ve just set up a Trex 450 Flybar clone with a minipix v1.0 fc. on firmware 4.4.4. Now knowing zero about arducopter. It took months some how I’ve got it flying. I’m at the stage where I need to get that stable hover so I can try out auto tune. I’d like to ask some questions If I may.
It’s got a ds520 servo on the tail.
-
do I need to do auto tune at all since I’m using the flybar? The docs seems to say something about only needing to tune feed fwd I think If I remember correctly.
-
I’ve read through this thread and will try out some of the settings from Chris and Ardisd to see which works for me. Trying it the way the docs suggested made me a scratch my head a lot with the tail wags I was getting… Mind you I’m keeping it on the training gear because I don’t trust the thing yet and yes I know that might be a bad idea but better safe at this point. I noticed with my current settings the tail will wag as I increase the pitch and it gets light on the skids but as soon as it’s off the ground completely the wag goes away… guess the gear holding it back is the problem.
Here are my current settings before I input Chris’s settings to start with
|ATC_RAT_YAW_D , 0.003
|ATC_RAT_YAW_FILT , 20
|ATC_RAT_YAW_I , 0.15
|ATC_RAT_YAW_ILMI , 0.0
|ATC_RAT_YAW_IMAX , 0.4
|ATC_RAT_YAW_P , 0.23
|ATC_RAT_YAW_FF , 0.06
Prior to these settings the tail felt very loose and It couldn’t decide to hold or not… by that I mean at one moment I’d have to hold hard left rudder to get the tail to behave and in the next few moments it would try to swing around right and then other times I’d have to let go of yaw altogether. I don’t know if it’s just reacting to wind or what… (I’ve not been able to find a calm day as yet) now it seems to hold better… not great yet but better.
can someone look this over and tell me what they thing of it?
- I’ve noticed in the new firmware the FILT parameter isn’t there instead I have three new parameters and I’m not sure what to do with them please help
ATC_RAT_YAW_FLTD, 0
ATC_RAT_YAW_FLTE, 20
ATC_RAT_YAW_FLTT, 25 - I changed this one to 25 as per Chris suggestion as I think this might be the FILT parameter? I’m not sure
I’ll be trying the new settings on this page as soon as I can. I’ll write again when I do.
Thanks guys
Yes. This is correct. You would tune the feedforward. You don’t need to tune the Rate P and Rate D gains for pitch and roll since you have a flybar. Also don’t set the H_FLYBAR to 1. Leave it at 0. Just be sure to set the Rate P and Rate D gains for pitch and roll to 0.
I just tuned a T-Rex 500. Now the settings could be different depending on the rotor speed that you are using. I am running mine at 2200 RPM. After tuning it, I had these settings
ATC_RAT_YAW_D , 0.0037
ATC_RAT_YAW_FLTD , 0
ATC_RAT_YAW_FLTE , 20
ATC_RAT_YAW_FLTT , 20
ATC_RAT_YAW_I , 0.03
ATC_RAT_YAW_ILMI , 0.0
ATC_RAT_YAW_IMAX , 0.4
ATC_RAT_YAW_P , 0.3
ATC_RAT_YAW_FF , 0.04
ATC_ANG_YAW_P, 5
One important point to make though is that I set my ATC_ACCEL_Y_MAX to 80000. The default is very low and came from the multirotor setup long ago. I just haven’t changed the default in the code because it would affect everyone’s aircraft if they are using the default. So this will affect the tune and could be the cause of the tail wag.
The other settings that shape your inputs are
PILOT_Y_RATE_TC, 0.08 Sets how quickly the yaw rate achieves the requested yaw rate
PILOT_Y_RATE, 120 sets the max yaw rate you can command with your stick.
I’ve shown you what I have mine set at.
Okay awesome thanks for the settings I’ll be setting up a 500 too if I can only get his 450 behaving right.
I have zero clue how to figure out my rotor speed. I just set the throttle curve to
70
72
75
90
100
I’m getting the “lean” errors and ekf failsafe errors. with the heli suddenly jetting off to one direction. Further reading led me to believen it’s vibration’s issue so I went back to basics and tried adding a layer of aluminum between the mini pix and used the 4 times 1cm piece of m3 tape from the fc to the metal and from the metal to the plastic antirotation bracket on the heli… hope that helps will be doing the ground tests to see if the horizon moves again.
could you clear me up on what the
ATC_RAT_YAW_FLTD
ATC_RAT_YAW_FLTE
ATC_RAT_YAW_FLTT
are for and how I can determine the correct values for my 450? I thought they were frequencies for vibration dampening so I set same as the values i used for the notch filter. 47hz for fltt and 50hz for flte and 0 for fltd and I got a nasty fwd right tilt right after lift off… so I quickly set it back down to defaults… no clue what those are.
yes the atc_acccel_y_max default is 36000 and i did find that was moving a bit too slow for my liking I thought feed fwd was what would speed it up but no lol figured out the correct one later will be testing 40000 tomorrow on my make shift test stand and see if I like that. Now that you mentioned 80k It’s prob a bit too low… had my tc_input_tc set to 0.15… and found it wasn’t snappy enough I kept messing with pid to get that until tonight I realized what I needed to try out thanks again. my test stand will help me dial that in. just hope i can get rid of the vibes enough to have a well behaved machine so i can finally try to tune in a drift free hover
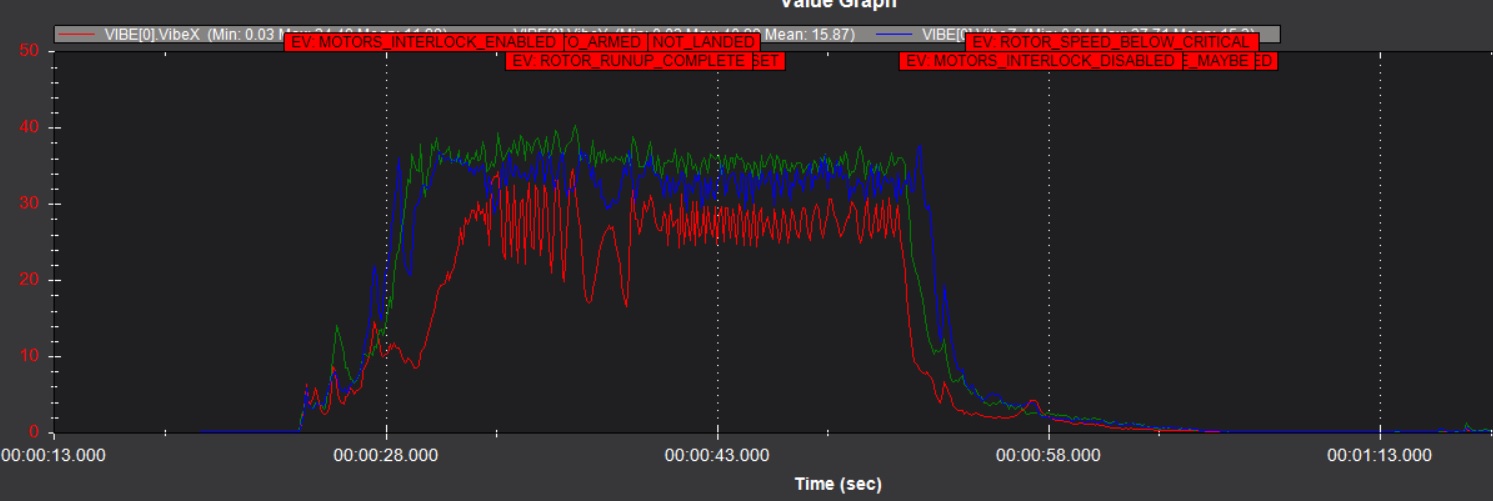
I looked at the vibes chart after doing ground tests tonight and see that I have vipes touching 50 at my default h_rst_setpoint of 70% the manual says try above and below this and those values gave round 40. hopefully the new mounting will reduce that.
… this has been literal months upon months of trying to get this machine off the ground I’m exhausted. ardu feels like im studying for a physics phd here gosh. Thanks for the help really appreciate it.
I think you have problems with your vibes. More damping do not remove the vibes. search for the source of the vibes. Blade Tracking, … …
BR
Heri
Hm, well blade tracking is perfect so the only thing that could be causing vibes would have to be the main gear which on all 450’s Iv’e ever seen are always out of round. Mine always seem to wobble round up and down besides being out of round. That’s not something I can fix, I’ve balanced the main gear best I can. Blades best I can. blade tracking is near perfect as I said so If this mounting solution does nothing and I can’t get rid of the vibes then I’ll have to simply abandon the project and use either rotor flight, a kbar or a regular tail lock gyro which has no where near this amount of tinkering. shrug.
You have previous RC helicopter experience, I presume? You know that you can purchase a simple RPM measurement tool (tachometer). They use them on RC airplanes to check the prop speed. I just set mine below the rotor and then view it from a distance while I spin up the rotor.
There are ways that the minipix can do it as well but it requires some set up. Let me know if you want to go this route.
What about blade balancing? I normally will balance the entire rotor system by pulling off the rotor system on the shaft and balance the whole thing.
Please post a picture of how you have the minipix mounted on the aircraft. Also post a log so that we can look at your data and your parameter set up.
A tachometer… now why didn’t I ever think of that? ![]() I’ve used one on my gasser plane. Here I was messing around with calc software to get numbers and never being sure of them. I wouldn’t mind knowing how to do it with the minipix as well, is there a wiki you can point me to?
I’ve used one on my gasser plane. Here I was messing around with calc software to get numbers and never being sure of them. I wouldn’t mind knowing how to do it with the minipix as well, is there a wiki you can point me to?
Balance the entire head system with blades, grips and shaft?.. well… there’s an idea. Gonna take some kind of doing with this flybar head lol. okay…hmm things to do things to do.
Yes I’ve got fair experience with building and flying them, I followed a lot of finless bob’s stuff on helifreak to get me started… okay got a few chores and then I’ll get to clearing my old logs doing the ground run up to check for vibes. I’m at the Checking for High Frequency Vibration under traditional helicopter tips where you’re asked to remove all of your pid’s put the craft in acro after holding it down and doing a run up looking for the horizon tilt and checking the logs. I don’t have any sort of mav link capability on this machine so I just use yaarpu on the radio to see if the horizon moves…
Right I’ll get my stuff done and get to posting pics and logs
be back later
Here is a video that I did long ago when i was still flying flybarred heads. It shows how I statically balance the entire rotor system. Now I only show balancing the blades but you can remove the blades and ensure the flybar is balanced as well before balancing the blades on the rotor system. Hope this helps. BTW, I had just bought this used T-Rex 500 and I still pulled the rotor system and check the balance of the blades.

well you could use a long USB cord and connect it into a computer from the minipix. Just be sure that your cord is held down. Use Mission Planner to watch the HUD data. But I’m not thrilled with this technique. I think you might find the smoking gun with the blade balancing. Also I would like to see how you have it mounted the minipix. The reason the ardupilot system is so picky about vibration is due to the special navigation system it uses (i.e. Extended Kalman Filter(EKF)). It requires the vibrations be fixed physically (i.e. vibration absorption, blade balancing and tracking) and not through software filters. Now the control system can use filters to remove the vibration that the Nav system can tolerate but are bad for the flight control system. That is where you would use the INS Notch filters (INS_HNTCH) and the low pass filters (i.e. ATC_RAT_XXX_FLTT, …FLTE, and FLTD).
Let me know what you find when you do your balancing.
I’m definitely going to implement this thanks!!! okay bout to post the info you’ve requested… I’ve gathered a lot of info
Wont the swash plate throw off the balancing? With mine it’s got longer pin for the anti rotational bracket at the back of the 450.
Yes I hear all the time when people guy used heli’s they take then fully apart and rebuild. I’d do the same I never though of balancing the flybar though I had though about balancing the entire head once but didn’t know if that was worth it. Now I see it is so that’s next on the list. I have flybarless head’s here also I may do that on mine, I do love the flybars though… (no software woes or fuss lol) but this machine is being set up for a good friend of mine so it’s definitely gotta get a flybar.
How’s that 500 flying? Any vid’s?
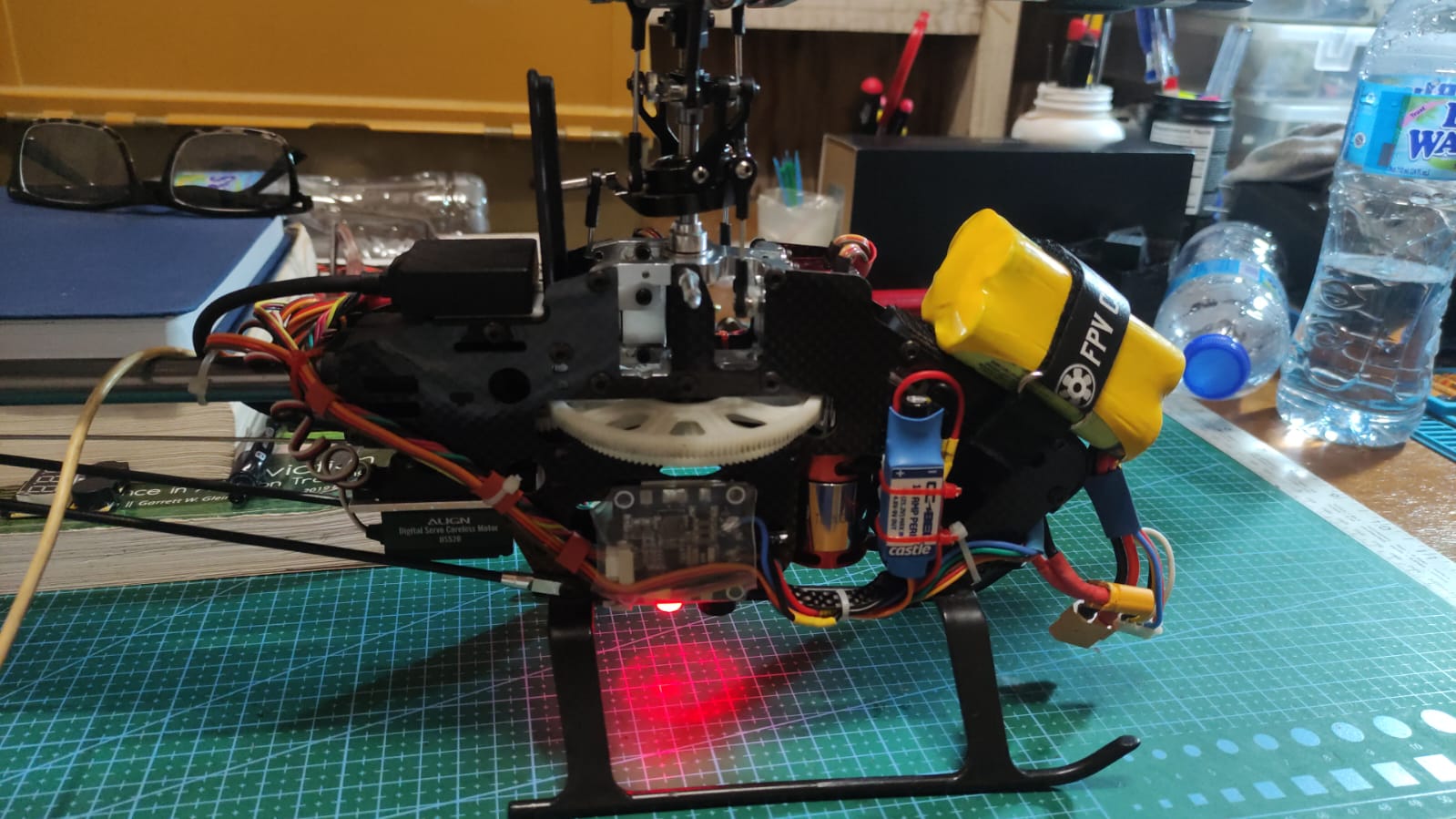
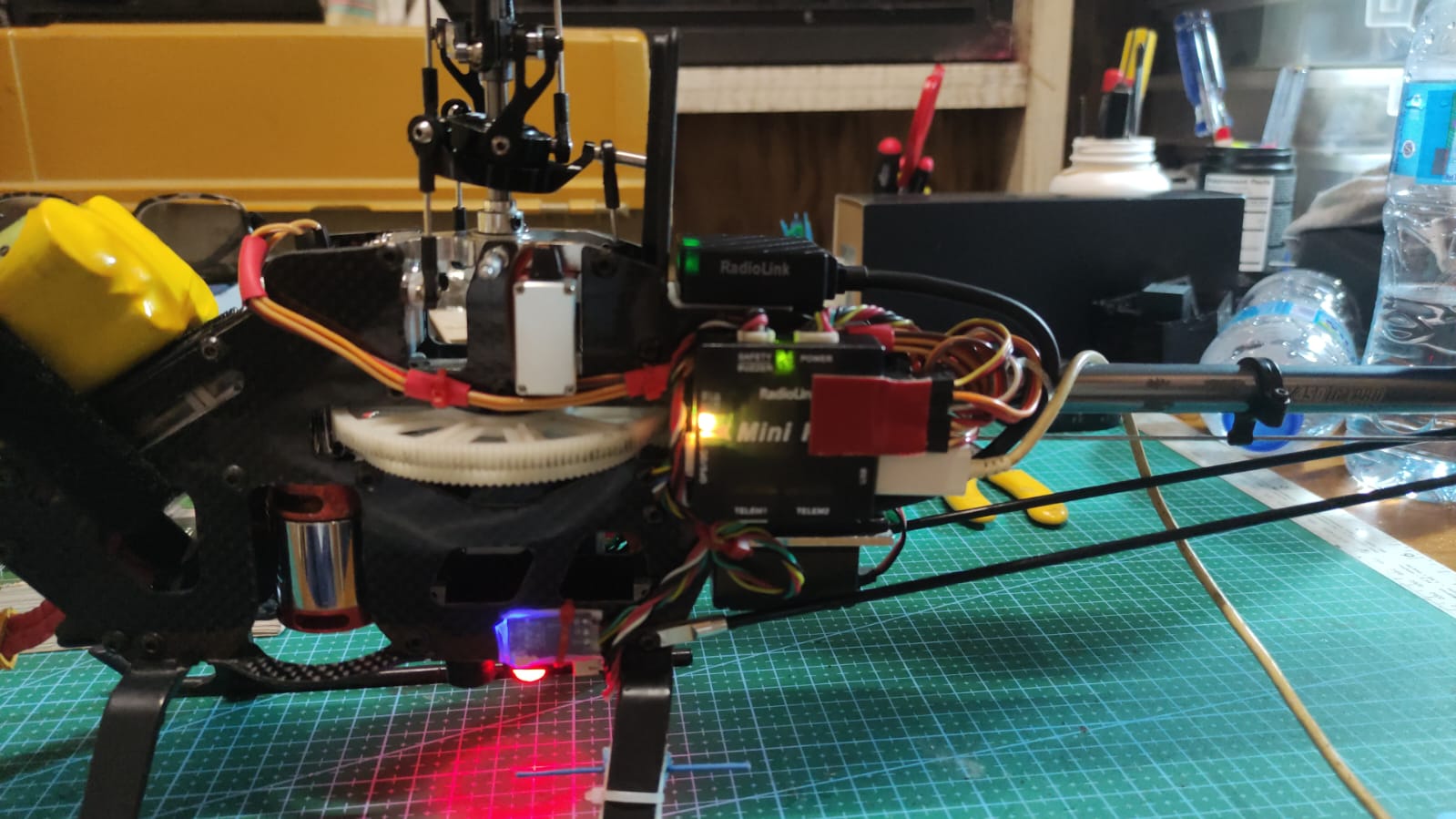
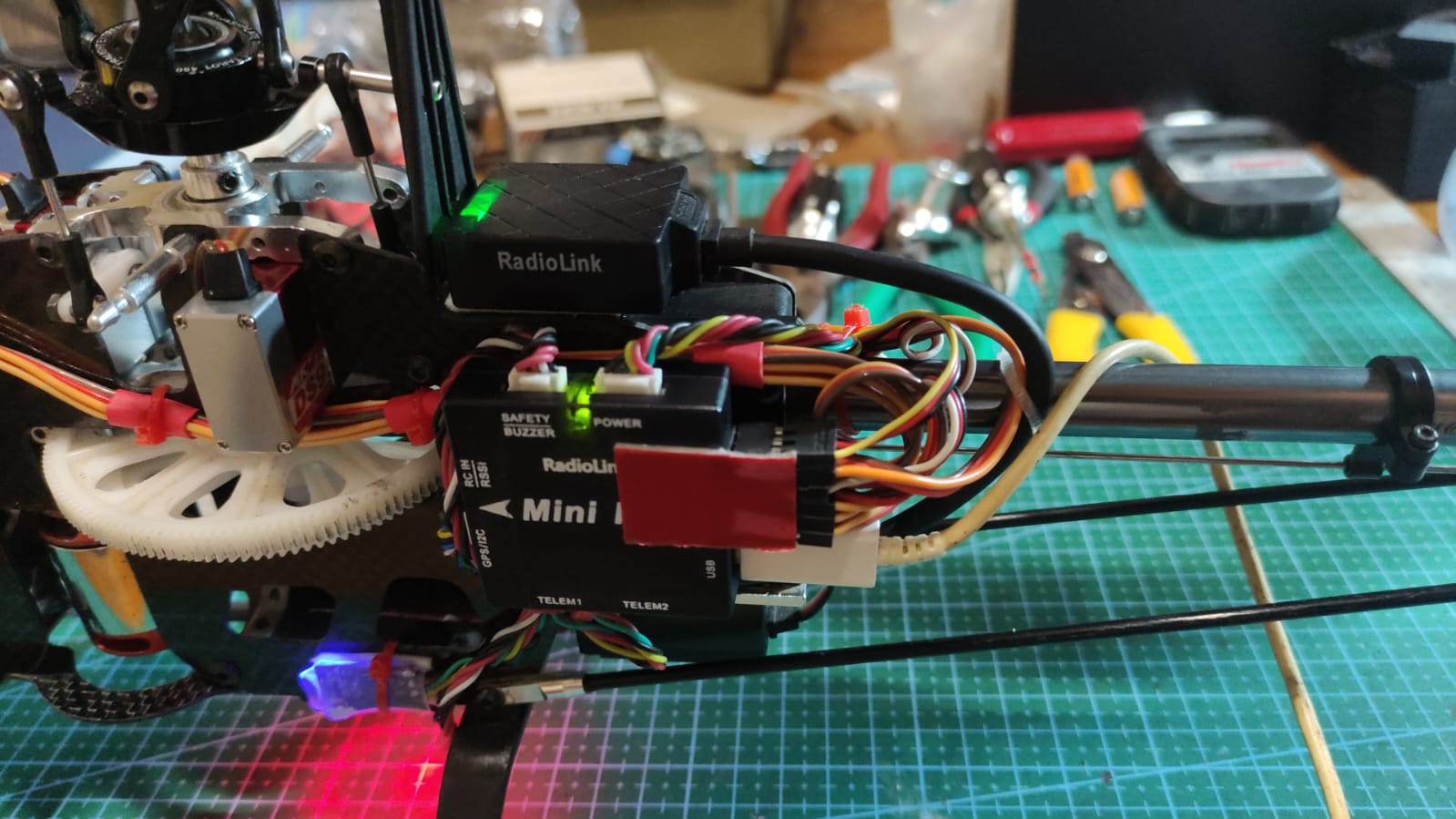
Alright, so after collecting all of this information I realized I’d forgotten to “calibrate level” the heli again since I’d removed the flight controller and done over my mounting. You’ve asked for logs and I have several to show you so let me get to it. first off here are the pics of the flight controller mounted. If you look closely on one of the shots, you can see the pieces of grey 3M tape above and below a silver looking piece of metal (aluminum from a meter ruler I cut up) I think I got this mouting style from helifreak or raptortechnique.com

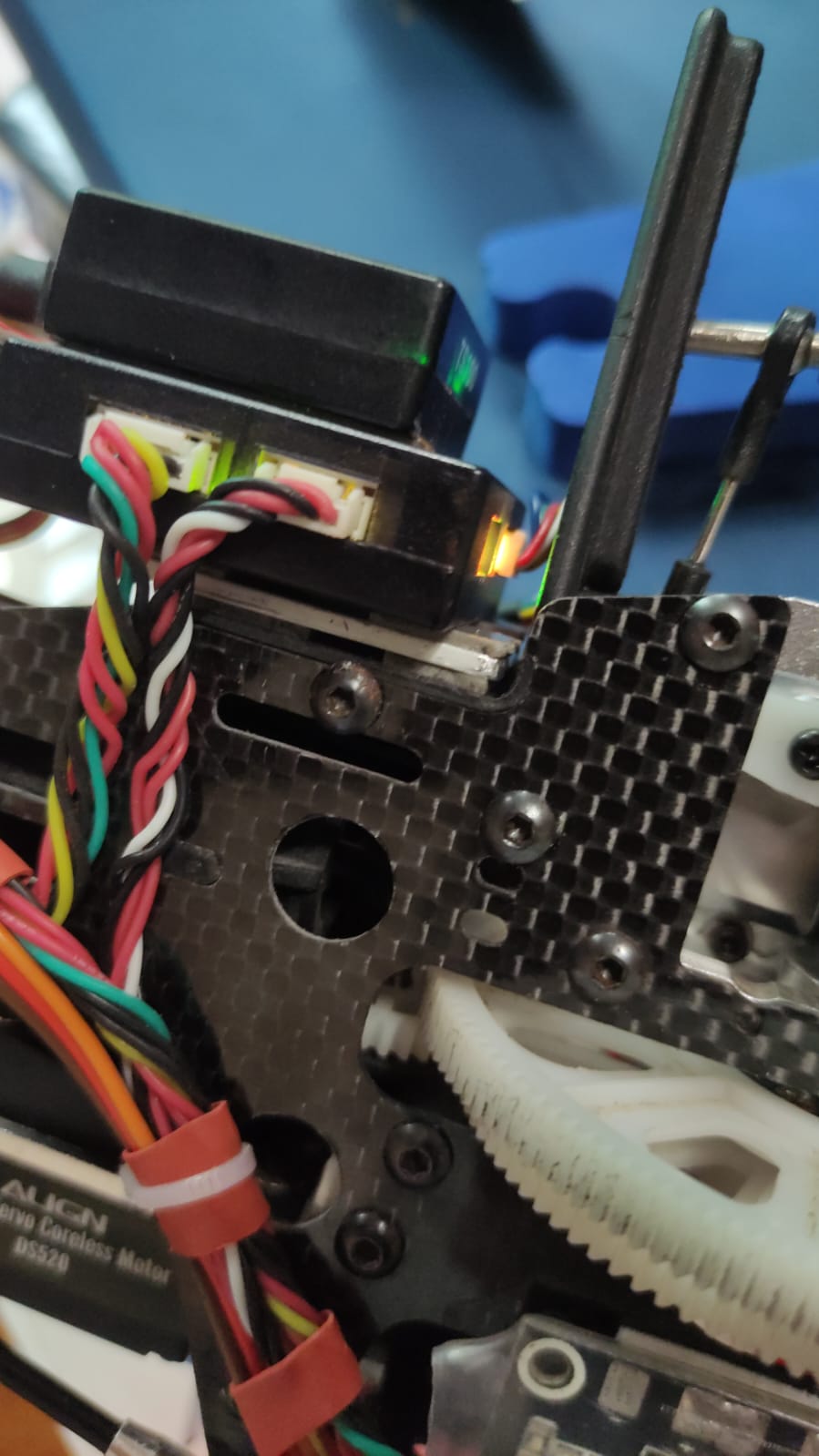
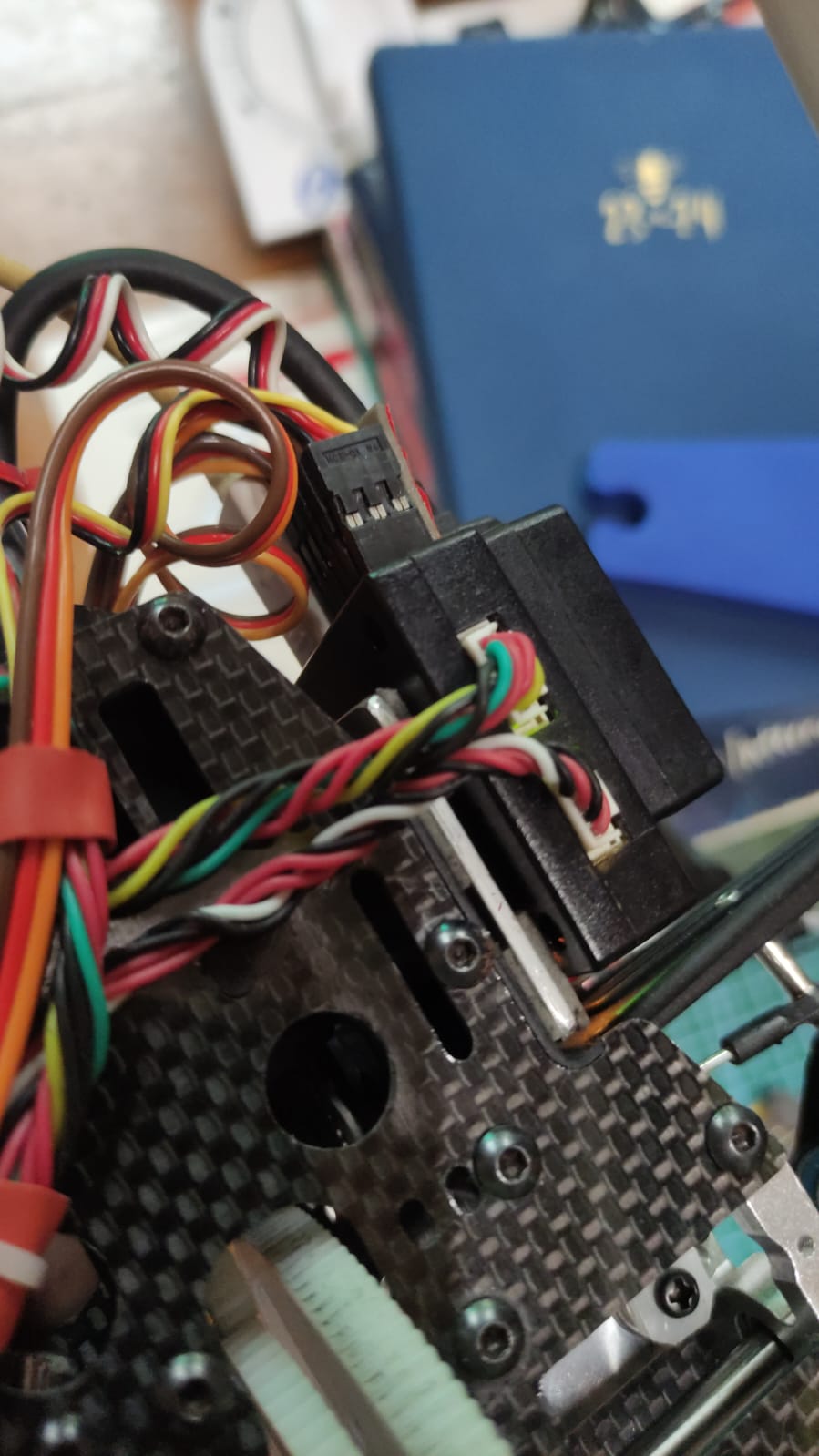

Yes If I still had my laptop (got stolen) Id have done the ground run with the usb cable connected. sadly I only have a desktop now so gotta do things the harder way for the time being lol
you asked about the head speed I used the tach and I got 2700 at the bottom of my throttle curve so it’s likely 28-3000 rpm at hover and higher ( pretty close to the rpm calc figure I got when I checked)
I’m using the h_rsc_mode 3 as I don’t have a governor
this is my throttle curve
70
72
75
90
100
As for the logs here are the old ones I took of the ground runups checking for horizon drift with zero pid’s and a few of the other recommended options from the documentation with different setpoints setup
I’ll also include the pics of the graphs I got from them incase you’d rather look at those straight away.
here is a link to the shared dropbox folder containing the three older logs old ground run log files 60 - 80% setpoint
I should mention that previous to today I was very apprehensive about flying the heli on this new setup with arducopter because it was my first time and for fear I messed something up I stuck on the training gear… that might have greatly contributed to bad vibes in my older logs… the ones I just shared however were with the heli pinned down and the pids zeroed out. The ones about to be posted are with the flight controller’s new mounting solution.
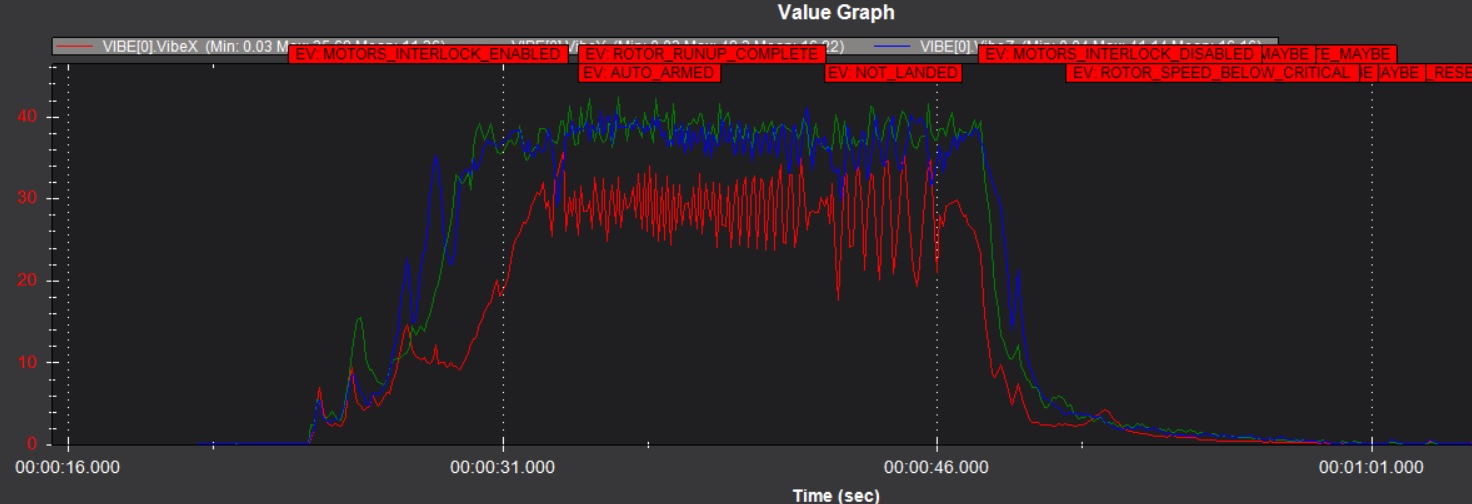
Here are the results of the ground run up with zero pid and the new mounting setpoint 80%
here is the log for the ground run up with new mounting
ground runup no pid new mounting
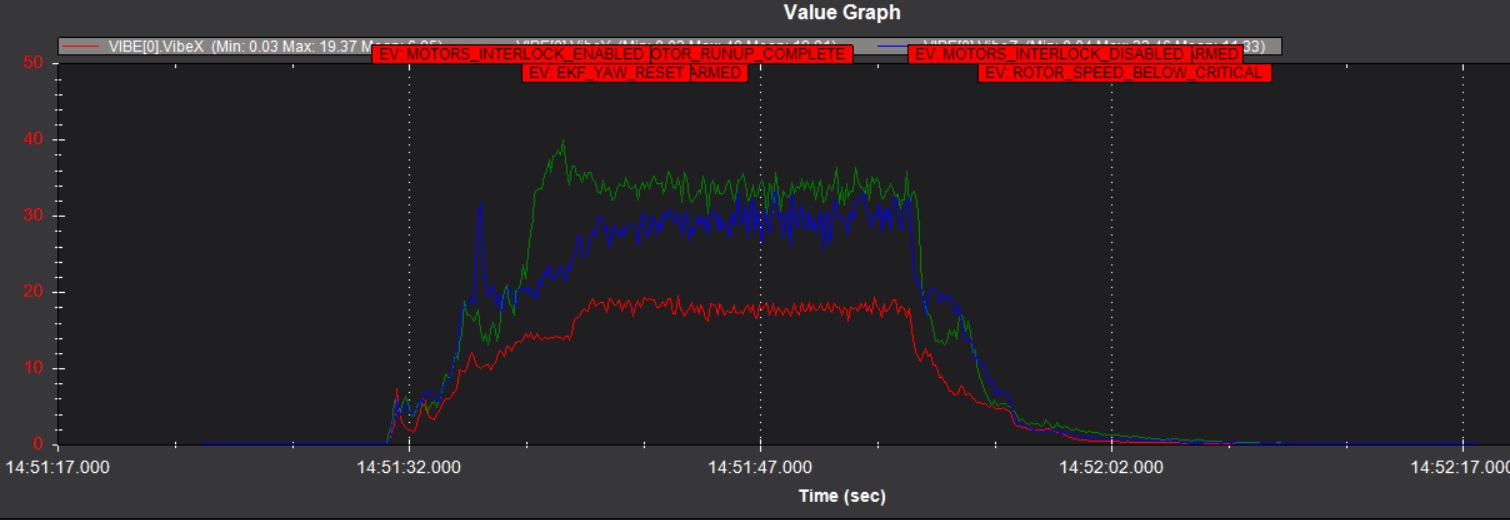
after taking this I went to test hover at setpoint 70% no training gear and no notch filtering
from this alone I can see an improvement here is a link to the log file
first hover no notch filtering
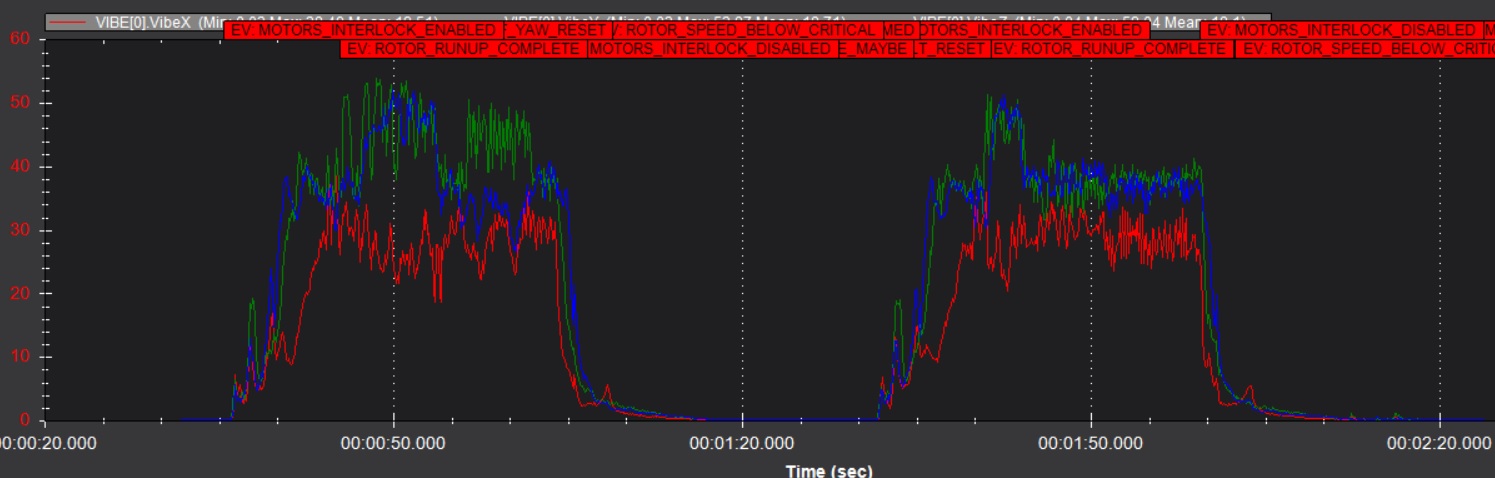
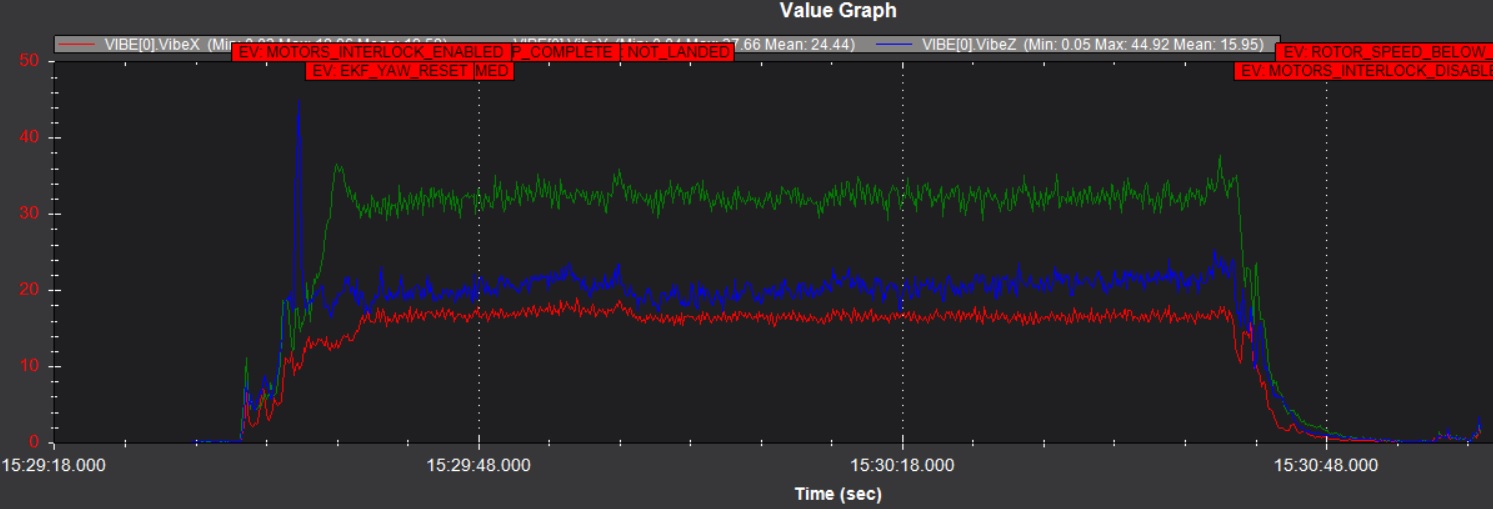
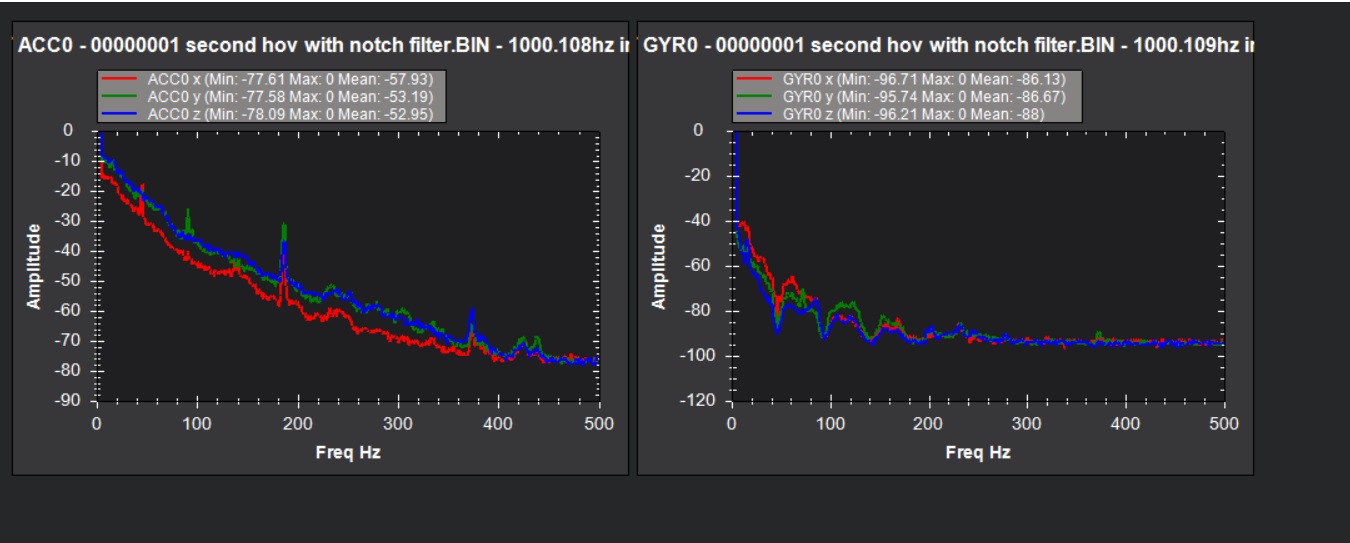
the second hover I applied a static notch a filter here is a pic of my graphs before and after notch filtering
after filtering
and here is the log for the second flight
second flight static notch filtered
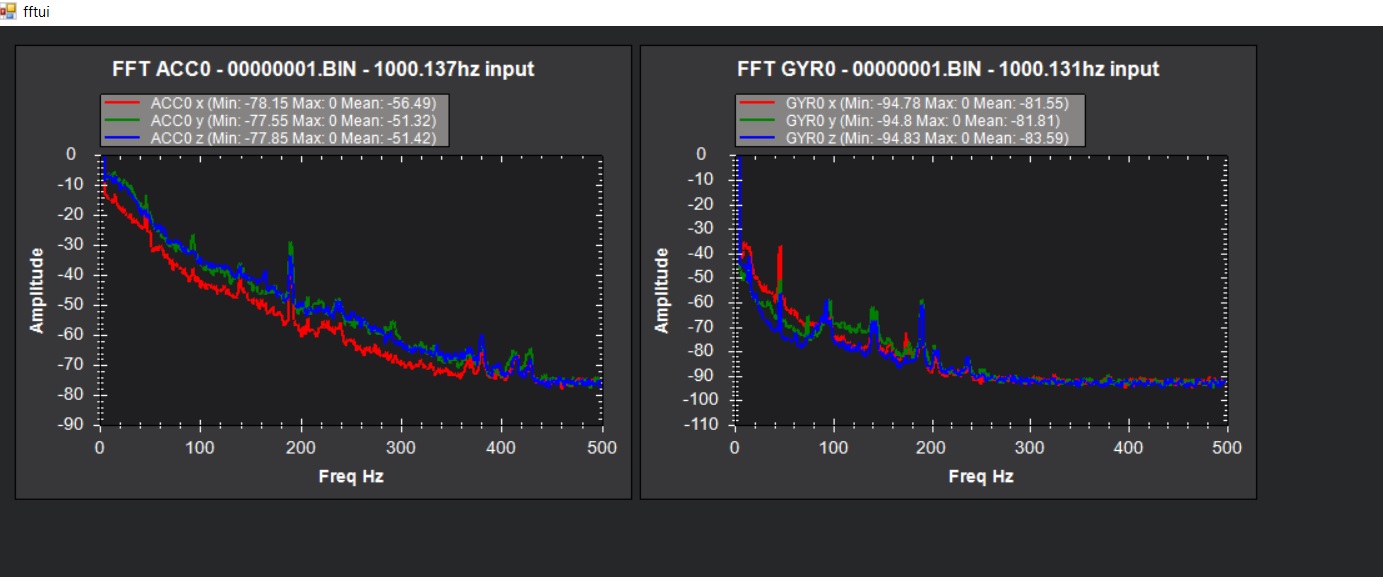
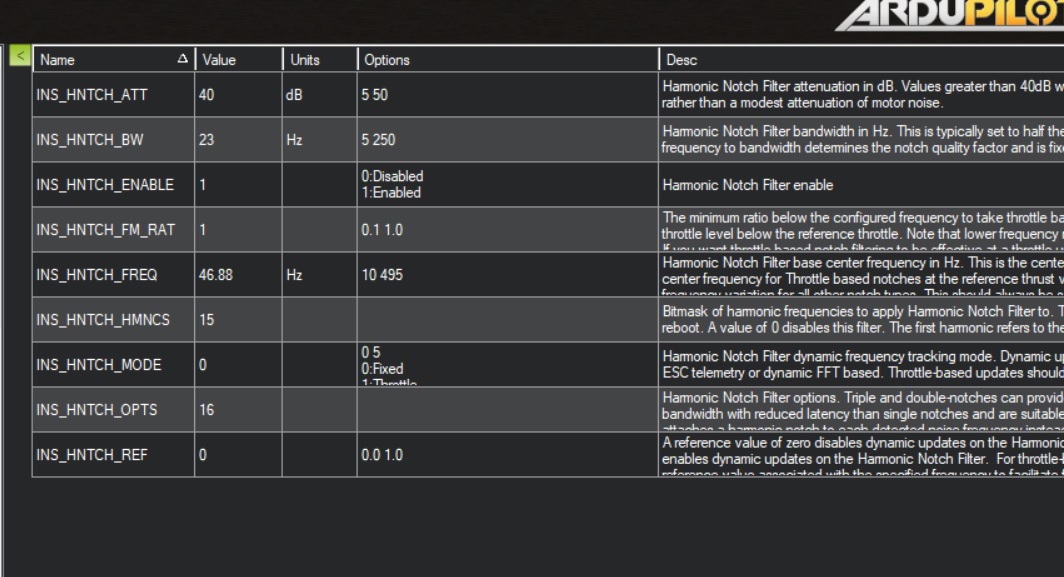
here are the settings for my static notch I didn’t do dynamic as I got lost in the instructions and I don’t think my esc has any rpm sensing
during the week I’ll do the “calibrate level” again, pull out the head and balance it as you’ve suggested.
I do have a question a weird quirk I noticed while setting up.
Chris Olsen suggested in his video to not use the servo centering trim options to get the servos at perfect 90 but instead use the ball links to get a level swash plate. I did this finally. I also tried using the center trims on the software and noticed that the servos don’t travel at the same rate after doing that. So basically I can level the swash using h_sv_man command and when I check max and min values the swash is no longer level at max or min. Worse every time I tried to level at max or min it threw off the swash mid centering and I had to go back and set up pitch curves over and over…I eventually gave up on using the trim settings to level my swash and went ahead with what Chris Olsen suggested just using the ball links.
However I suspect I’ll have to go back and check that level swash again as I suspect my servos are still not moving at the same rate… In other fbl software I’ve tried like the kbar they require you to have level sways at mid min and max collective throws … does this also matter with ardupilot or do we only need to care about level swash at zero pitch collective ?
Yes, Mine has a longer pin as well but that is on the stationary swash so it will find its own balance point. Plus the swash plate is so close to the shaft that it won’t make that much of a difference.
It is fully functional. I have tuned both the attitude controller and the position controller. So I did a quick check of the autonomous controller by putting it into RTL. That worked fine so I did some FPV flying with it. Loads of fun!
One thing to remember with these systems is you want to hold off on doing any autonomous flying until you have checked the aircraft in loiter mode. And don’t fly in loiter until you have tuned the attitude controller. I normally tune the attitude controller in stabilize or altitude hold modes.
Regarding your pictures, I’m not a fan of mounting anything on top of the flight controller. I built a mount for the GPS and stuck it on the tail tube. I’ve been mounting my controllers on the side frame. This has worked quite well for me. On the 500, I have vibrations below 5 in flight. Now one thing I forgot to mention is there will be more vibrations when you are on the ground. Mine were 15-20 for one axis when the aircraft was on the ground. So it is best to judge the vibrations in-flight. By the way, nice job on your cable runs. very neat.
What type of flying do you plan to do? Acrobatic? Pattern? autonomous? The head speed can come down quite a bit if you arent doing acrobatics and it will improve your flight time as well. Arducopter does have a built in governor that you can use once you have tuned your throttle curve.
Some notes on your parameters
ARMING_CHECK - Do not selectively turn off the arming checks. Keep them all on. These are important and can save you from bringing your aircraft home in pieces.
ATC_RAT_PIT_FF, ATC_RAT_RLL_FF -both of these seem to be too high in my experience. But this is a flybarred heli and I know that they can be higher in that case. we’ll have to check these later.
FS_CRASH_CHECK - disable this. It is mainly for multirotors to save their blades and engines from damage during a crash. It won’t help a heli.
H_FLYBAR_MODE - set this to 0. it only works in acro and it is better to set up your heli with out it. Just make sure ATC_RAT_PIT_P, ATC_RAT_PIT_D, ATC_RAT_RLL_P, and ATC_RAT_RLL_D are all set to zero.
Why are IM_STB_COL parameters set this way
IM_STB_COL_1, 10
IM_STB_COL_2, 15
IM_STB_COL_3, 30
IM_STB_COL_4, 30
This would severely limit your collective blade pitch in stabilize mode. Looking at your collective set up, these need to be higher. You want the second and third one to be above and below your hover collective. This suggests your collective in a hover is 22.5% of the collective max range (-3.5 to 10)
INS_HNTCH_OPTS, 16 - this should not be set to a triple notch. Once you implement the governor, the width of the noise will be much smaller and there wont be a need for a triple notch.
INS_HNTCH_BW, 60 - The bandwidth can’t be wider than half of the center frequency. Typically I set mine to 10 hz
That’s all I have for now. It is getting late.
I initially had the compass on the boom but couldn’t get the heli to balance hence why it’s moved to where it is now.
I was afraid you’d suggest moving the FC the sides. I initially had it there but found such difficulty routing wires that I opted for the easier top placement… I’ll revisit my mounting solution.
So the owner will primarily be flying sport for the time being not necessarily UAV missions.
I should have just included only the latest logs. I left the old one’s in for reference so you could see how the vibrations changed with the new mounting.
yes the documentation did suggest higher FF because it’s flybar
I’ll make the other changes suggested asap
This was set up this way for the ground run with the heli pinned down and zero’ed out pid settings as suggested by the docs to check the vibe data for “leans”
these settings ensures I have very little positive collective if any, putting minimal strain on the frame while it’s pinned down.
My flight Stab collective setting are the same as acro stab settings with full deflection of -3.5 to +10 collective
honestly I wasn’t clear on how to use the filtering I just winged it.
the values you’re looking at aren’t the newest values however. I did revise them in the second flight log. That should reflect.
Okay thanks for the info, I’ll make the changes, revisit my mounting and see if I can move the fc to the side of the frame, balance the entire head block etc and report back. (thanks for the complement on the cable management, you won’t believe the iterations I went through lol)
in the mean time here is a link to the latest flight’s log from yesterday with better slightly filter settings and better vibe data
second flight with notch filtering
wow good thing my battle has only been to achieve a stable hover till now. I’m fighting with the hov roll trim and ahrs_trim_y settings. I suspect I’ll have to do over the swash settings. This is starting to look like a full re-setup, well whatever it takes I guess.
Thanks for all the help!
Link video of the 500 in action!
Here ya go. it was a little windy but the heli handled it fine. I’m still learning FPV and just stuck with loiter.

1 Like
Thanks looks like you’ve got some good vibration isolation on that camera.
Yeah I can see how fpv with a heli can be a bit tricky with the landing especially. They aren’t the best platforms for fpv these days.
I finished making the changes to the heli. cable management isn’t as nice as before and I only needed minimal tape to balance out the whole head.
Really hope this reduces the vibes. I think I did most if not all the chances you recommended also. It’s already dark so can’t test hover but tomorrow God willing