Okay gotchya. I asked because when the heli crashed last time, I was unable to correct it’s trajectory with the sticks. It veered off and ignored my inputs or I should say, my inputs slowed it down but not enough. Maybe a larger angle would help? Then again that also gives the autopilot more to play with so prob not.
I actually wondered if I had put it into acro if that would give me full control of the machine rather than the autopilot doing the flying.
I’ve hovered a little in acro before it’s a bit more sensitive but manageable.
In anycase, 23!!!
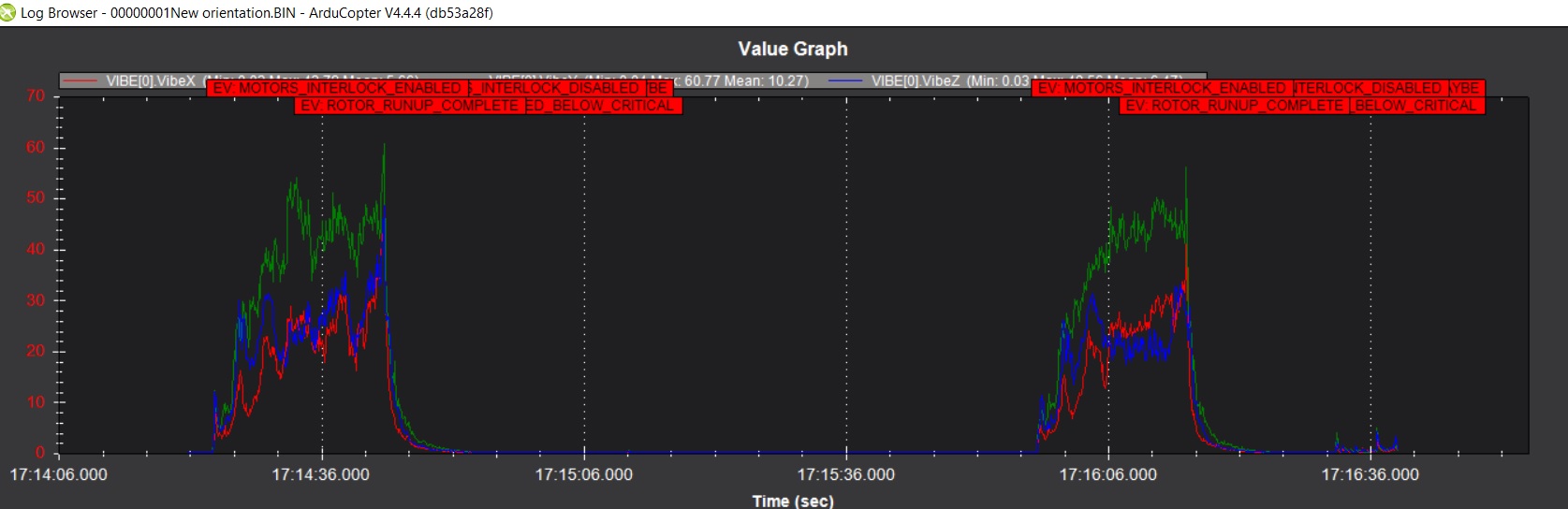
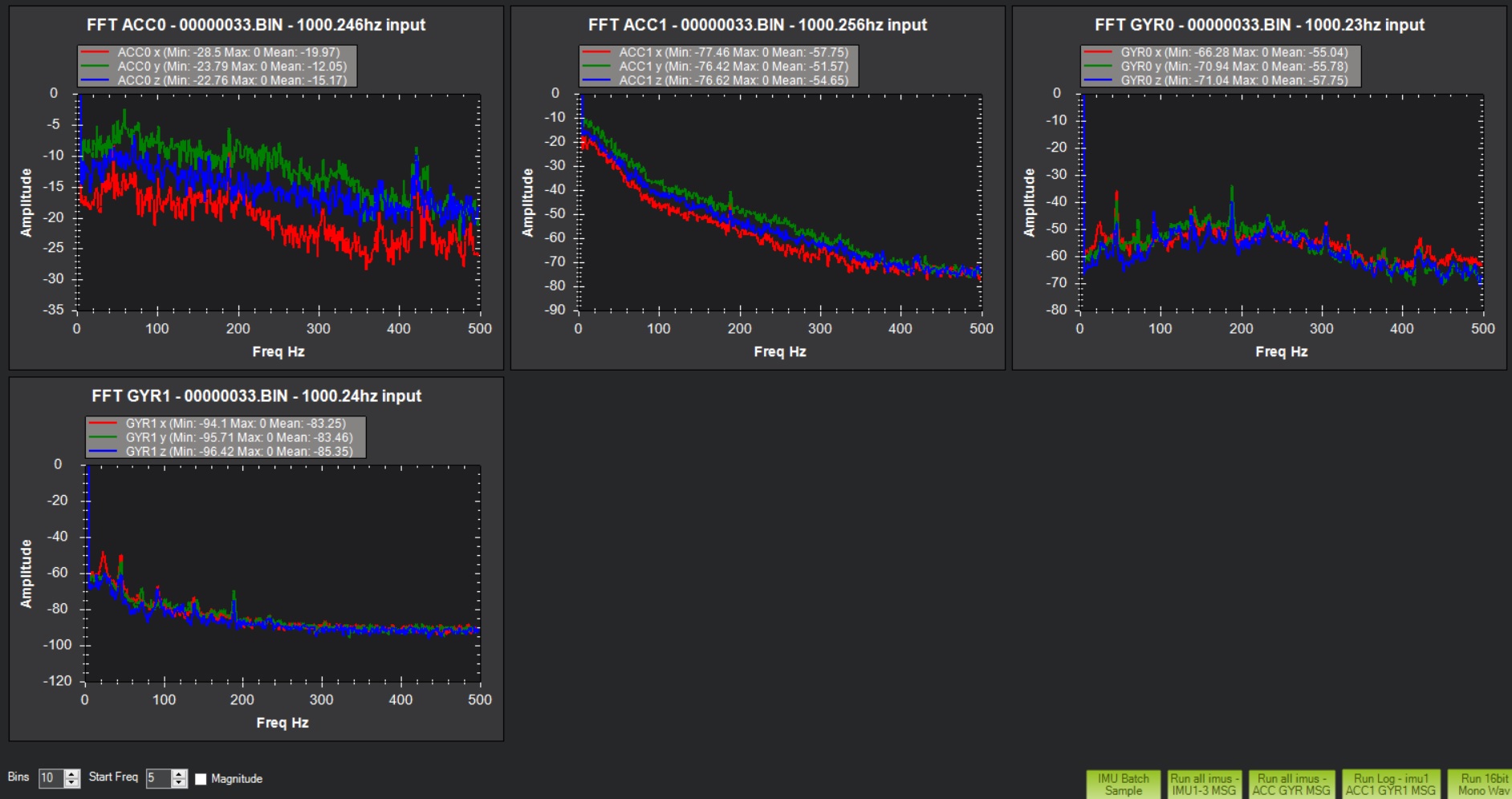
I tinkered today and the ground-run yielded a sweet looking 23.
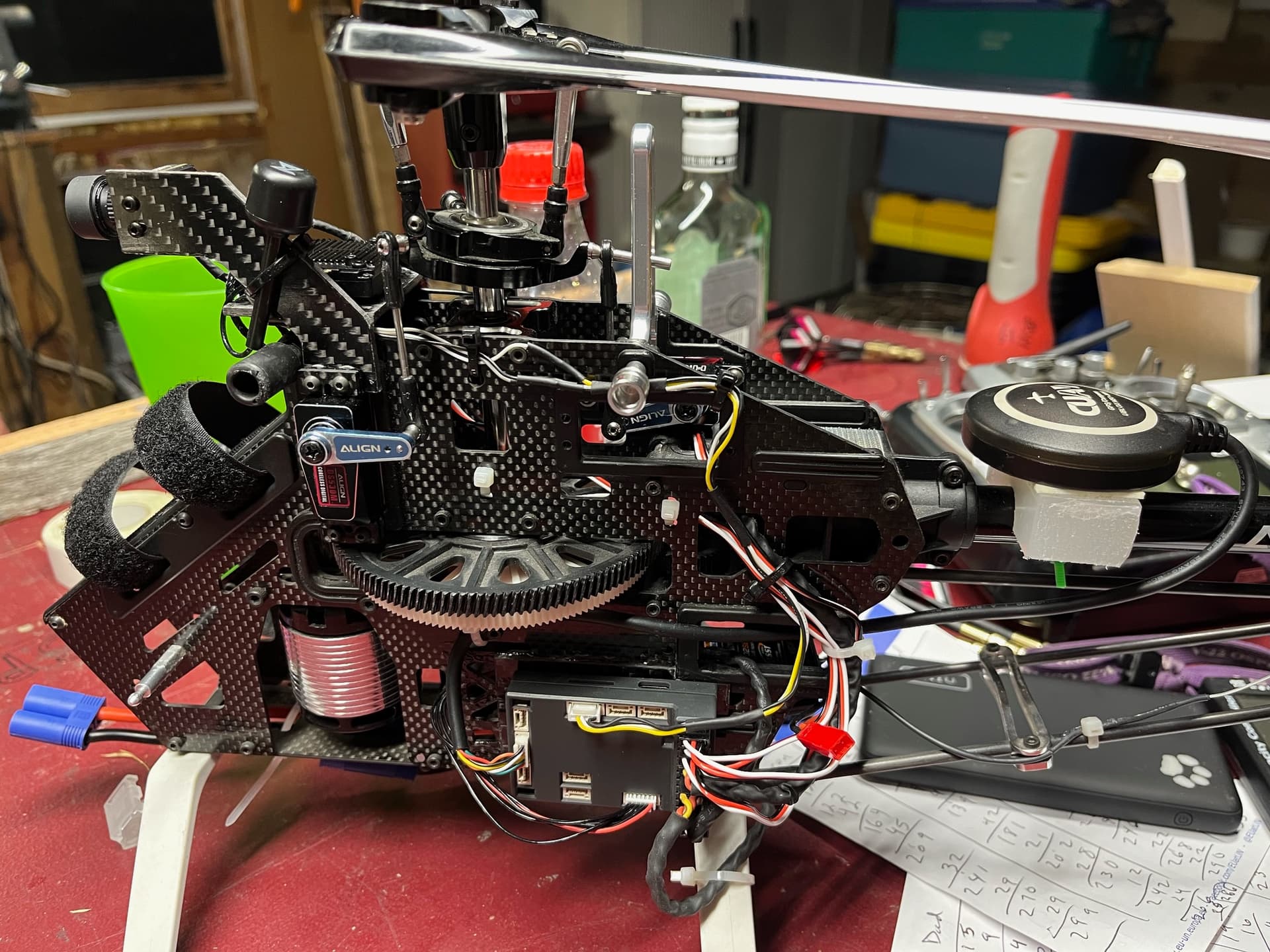
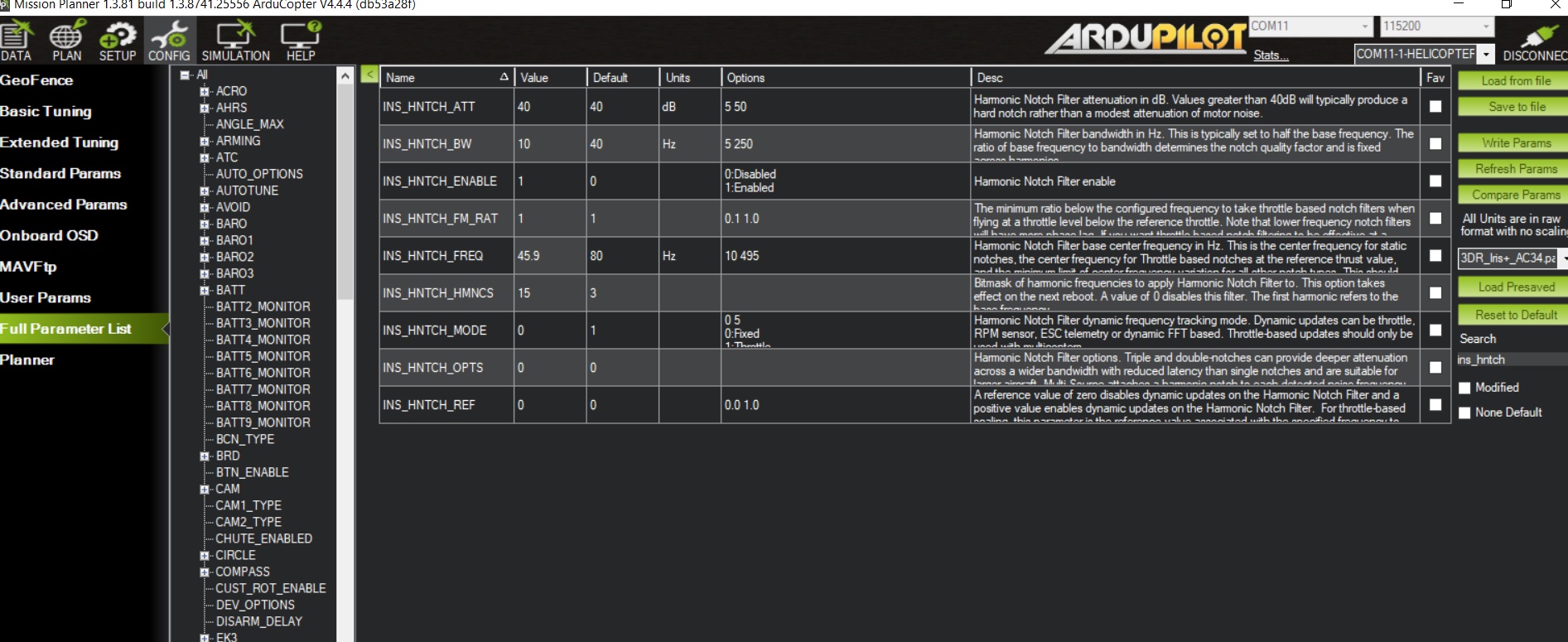
Check it out yo! aint it puurdy?!
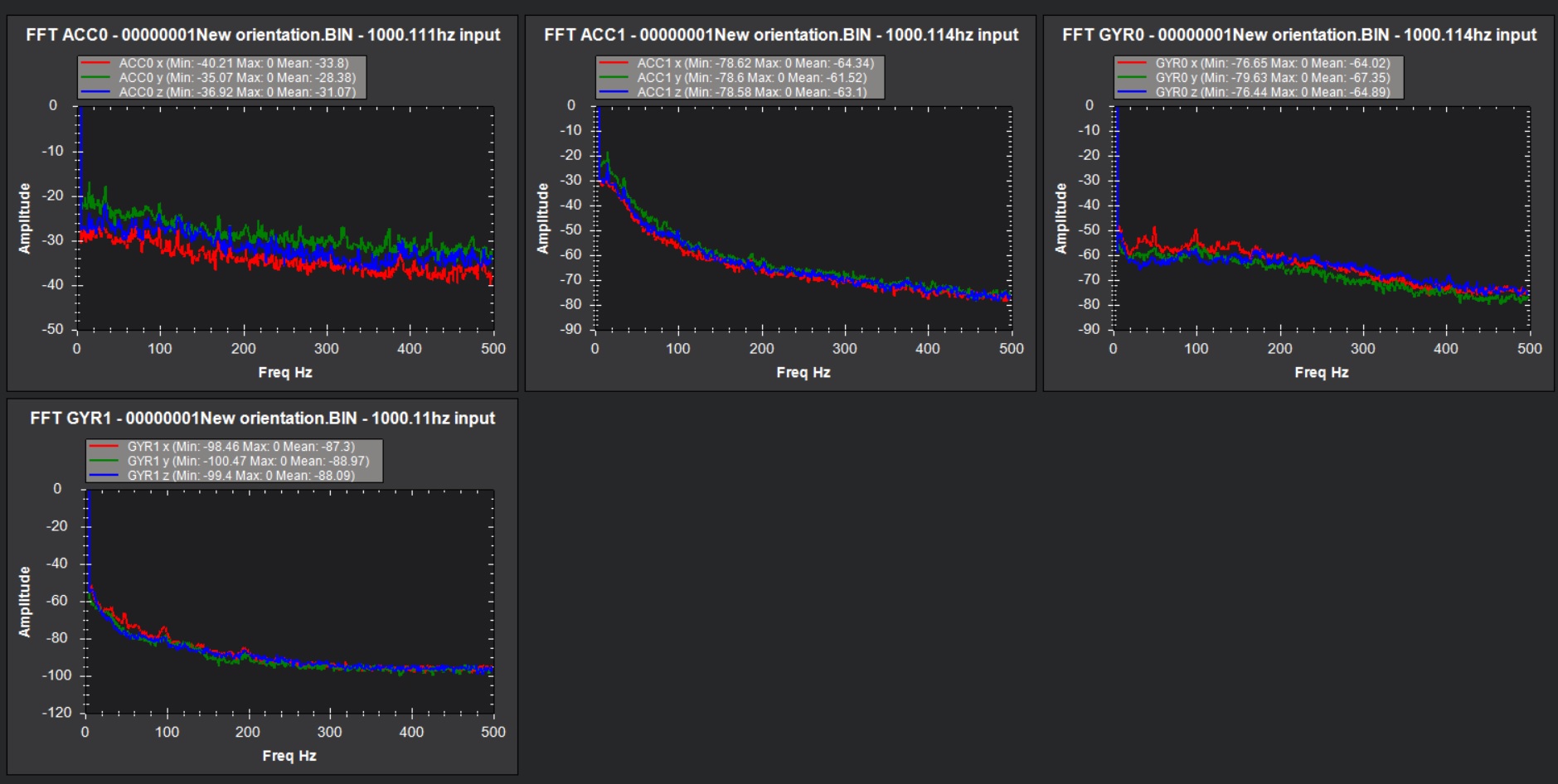
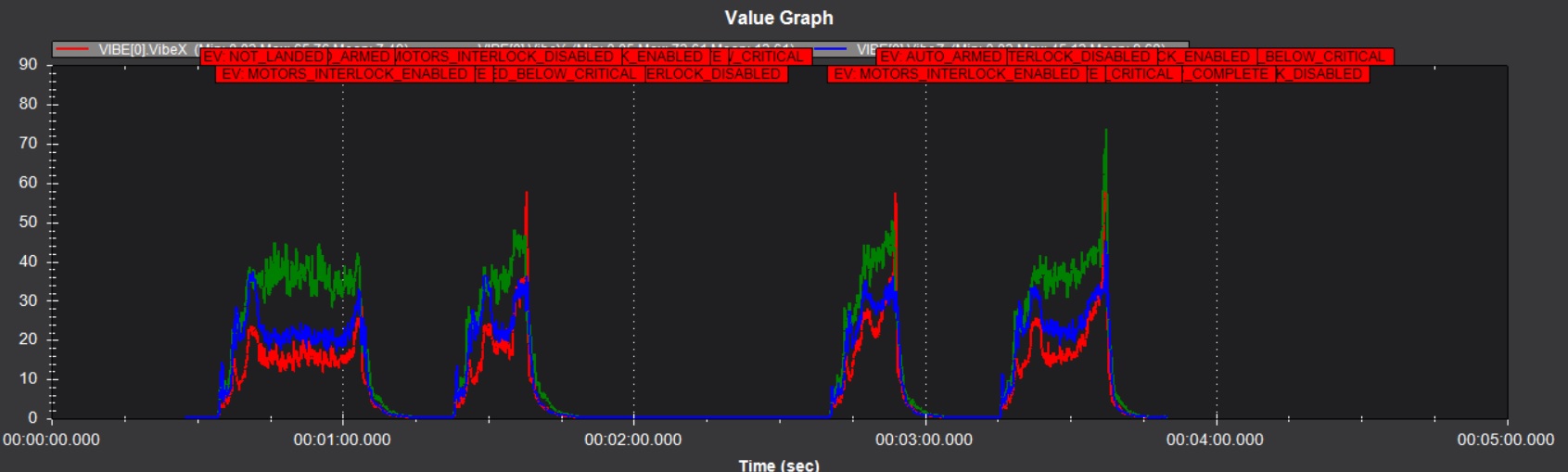
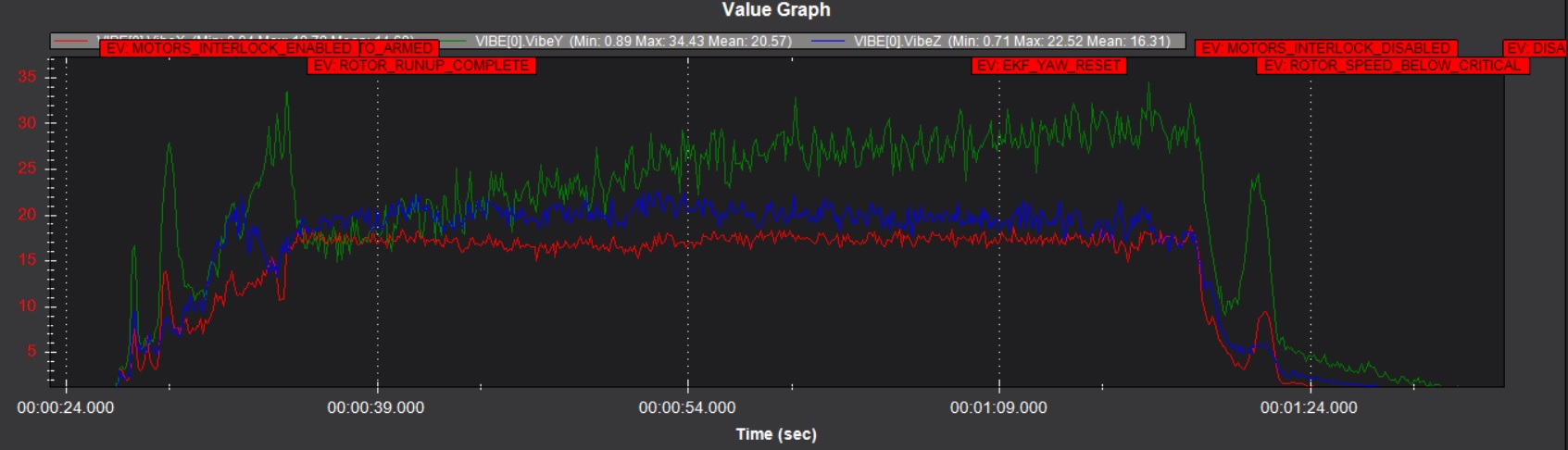
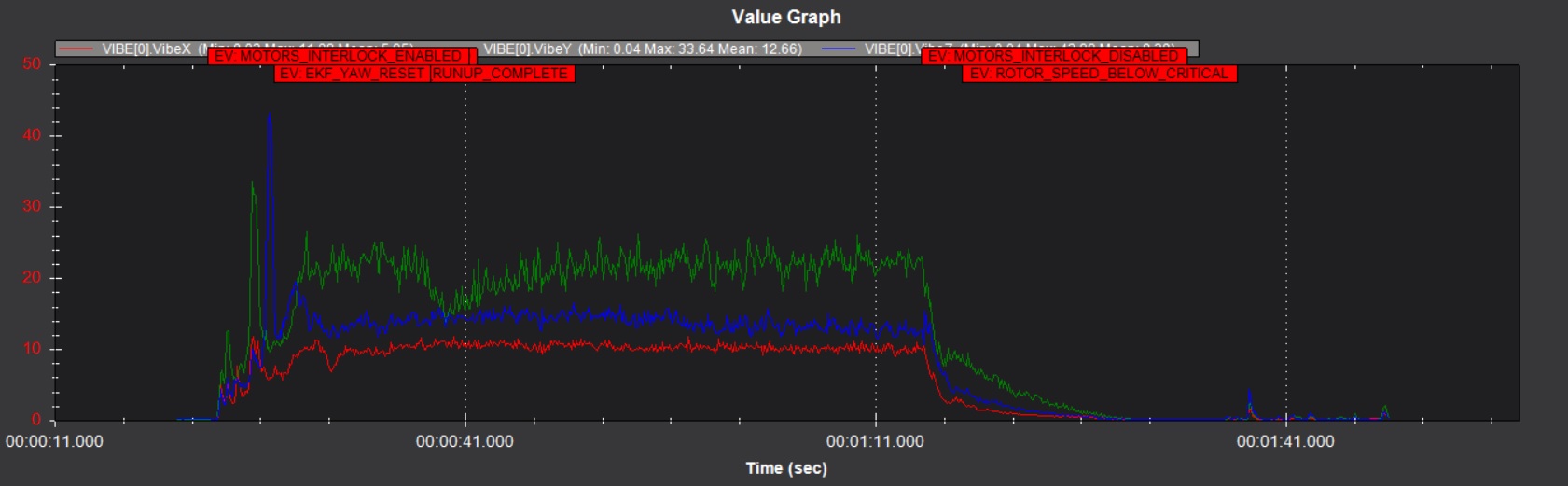
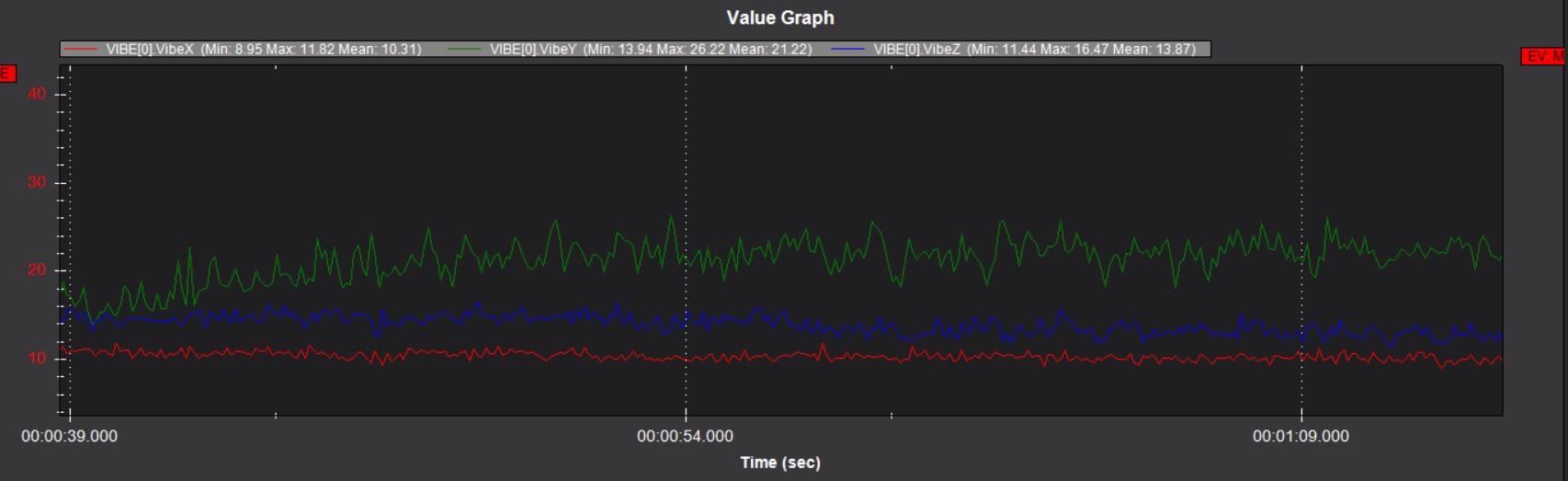
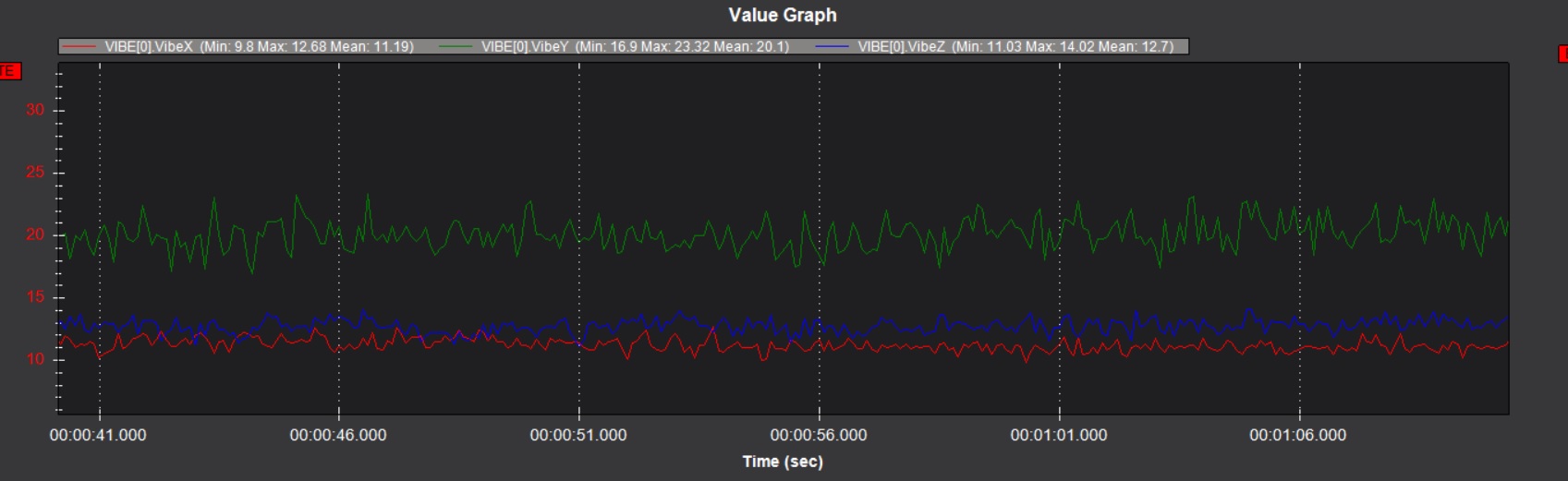
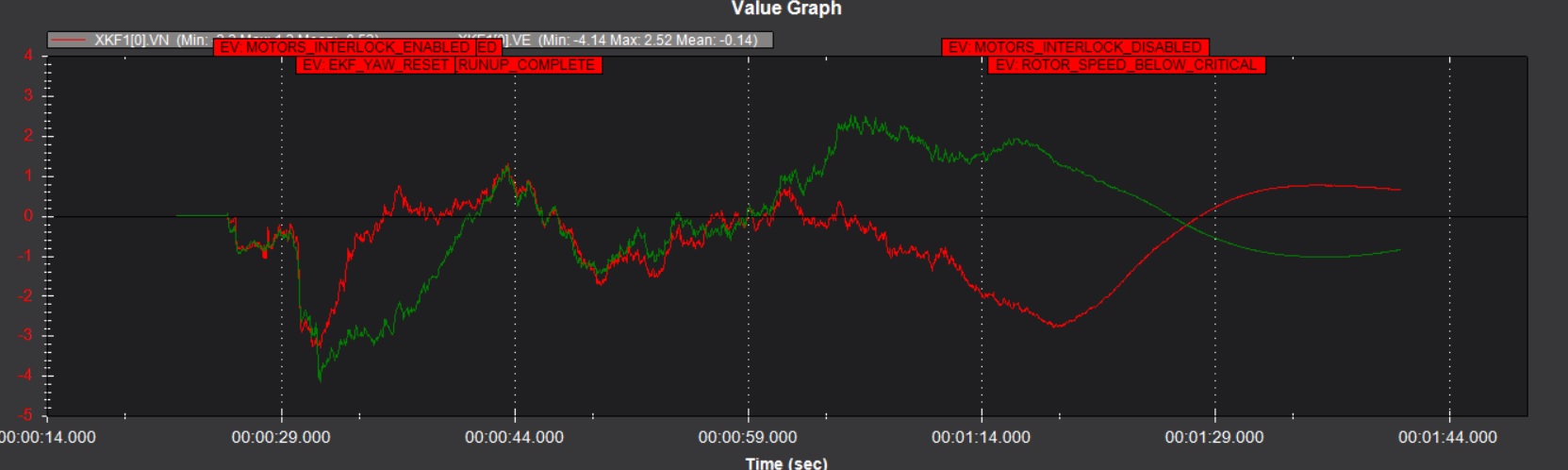
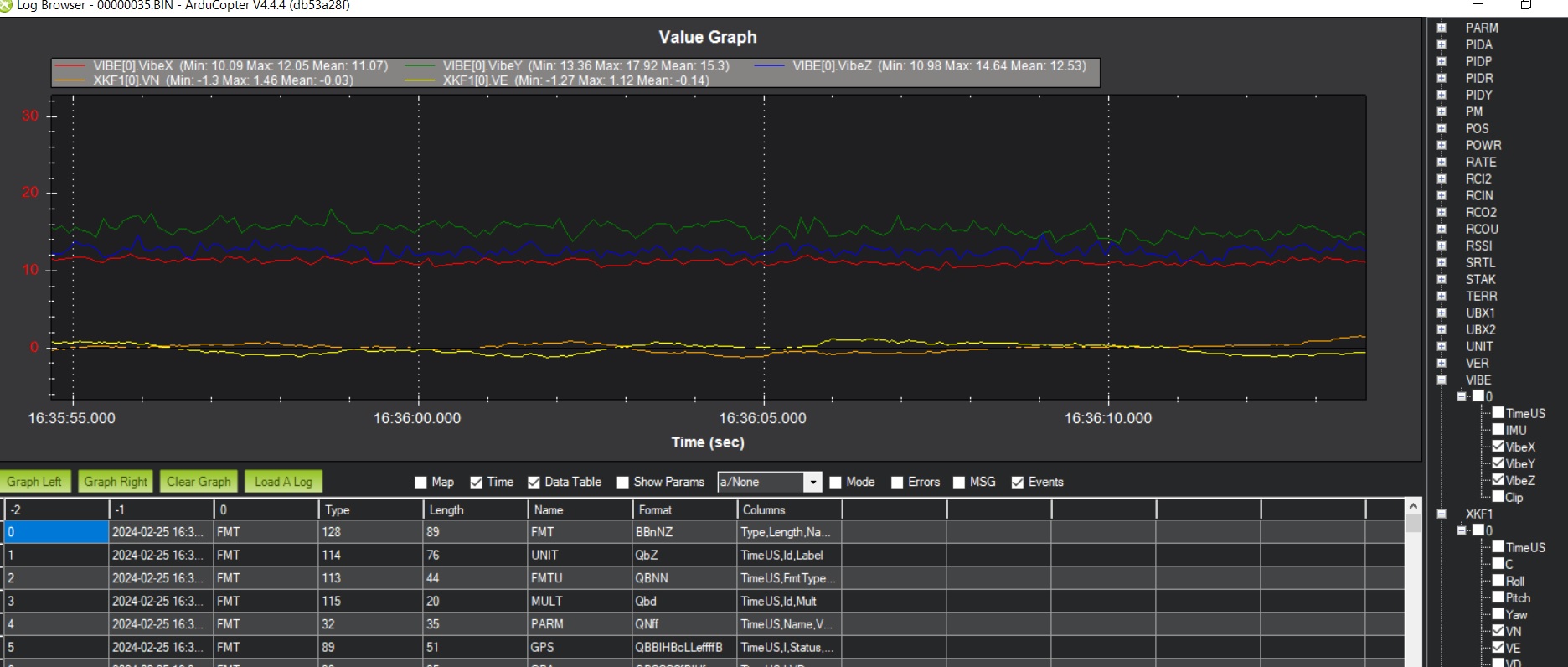
I wish I could say the same for the xkf1 values but this is a ground run so maybe that’s why?
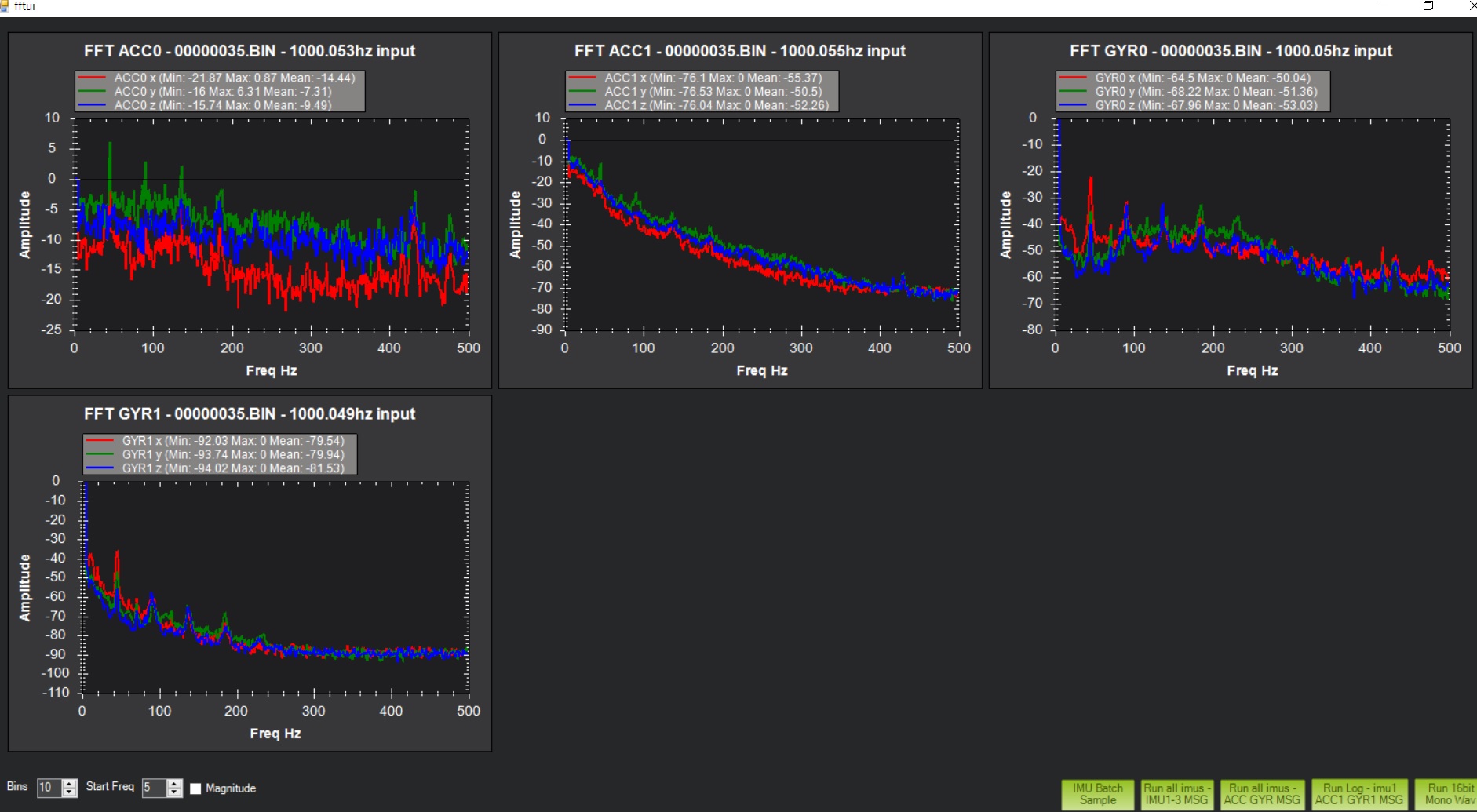
and the other vibe graphs…What notch filter settings would your recommend for this one?
log file below.
https://www.dropbox.com/scl/fi/wlt975r2vmrb1zr6nli84/00000033.BIN?rlkey=3j2ppdweh0xq8e3zwvbbte4vg&dl=0
After this test, I put it on my makeshift test stand that I use to tune the tails on my birds and finally settled on the settings you posted at the beginning of my questions. I’ll stick with that!
Hover test tomorrow God willing, (first with the training gear just to be safe) hoping for a good result. Then it’s back to fighting to get stable hover.
Vibes should be much lower in the air as you’ve said, so hopefully they wont play a role in the hover and it will be easier to keep it stable and staying putt!
Previously, on my very first hovers I was playing with the
atc_hov_roll_trim
as well as the
ahrs_trim_y
as suggested by the documents but it never seemed to hold hover I don’t know what I was doing wrong. Fingers crossed this time I can get past this stage and into auto tuning.
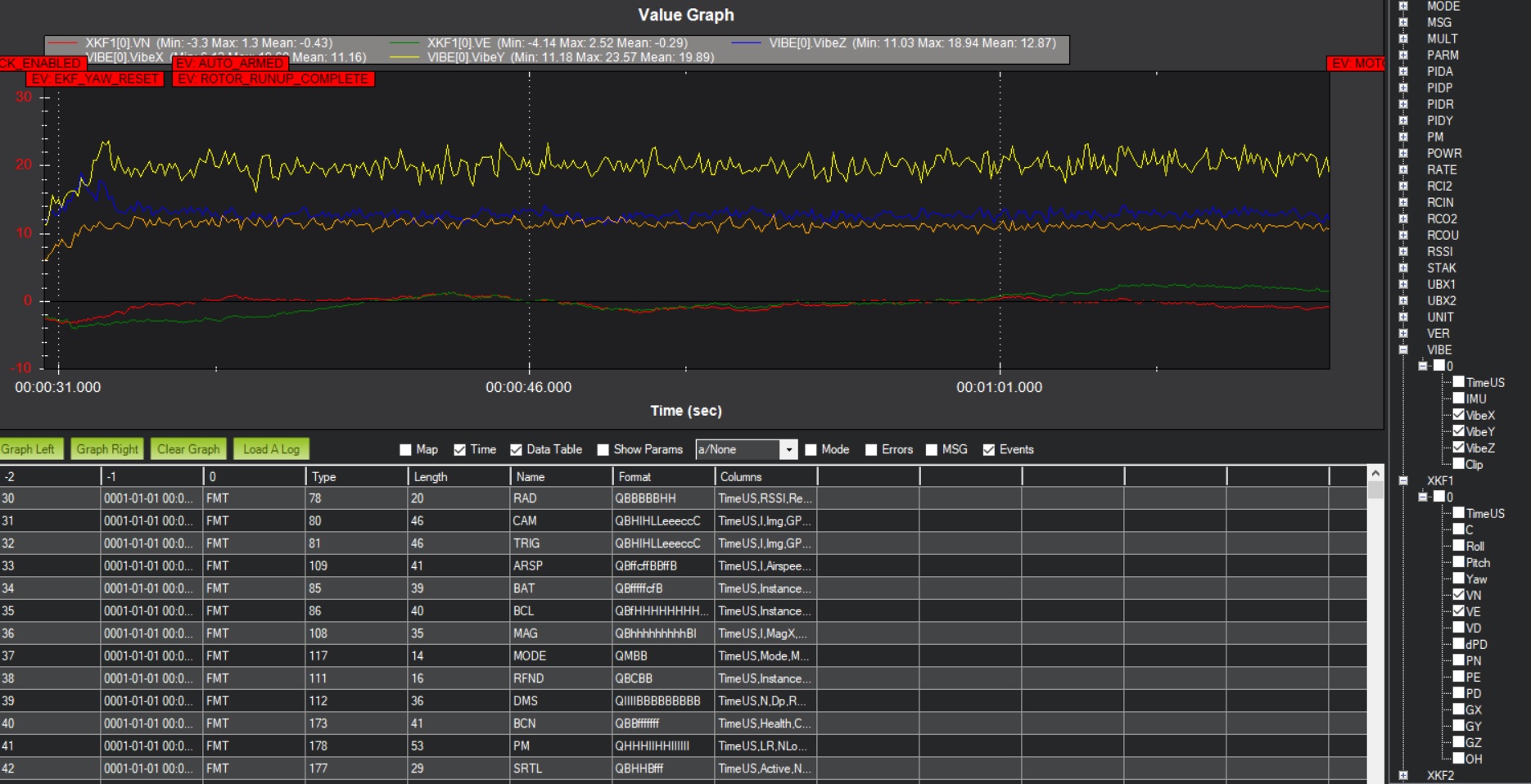
Oh I wanted to ask, where do you go in the log file to see all the inputs the pilot makes and the parameters I’ve got set?
I need to figure out properly how to determine how much roll and pitch I’ve used to level the craft so I can put those values in to atc_hov_roll_trim and ahrs_trim_y
I’m really interested to hear your suggestions on notch filtering with these results, so let me know what you think.
Wish me luck!
Thanks again.
Edit just saw this… xkf and vibe values. The averages on the xkf1 looks actually decent no?