Coming soon! Matthew Hampsey, Tridge and I have been working on a new implementation of ArduPlane Aerobatics - which is trajectory driven - so the aircraft navigates during aerobatic maneuvers - which allows for very precise maneuvers and minimal effect from wind, etc
We hope to soon have this all-new quaternion-based approach incorporated into master - and in a week or so will have some SITL videos followed by flights on various models. We think you will really enjoy what this can do!
Hi @andyp, looking good. By the way, I added a picture at the top to make this blog appear prettier on ardupilot.org. Hope that’s OK… of course feel free to replace it with another picture if you like.
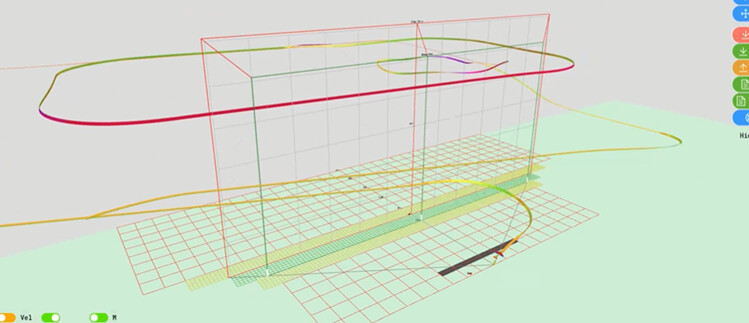
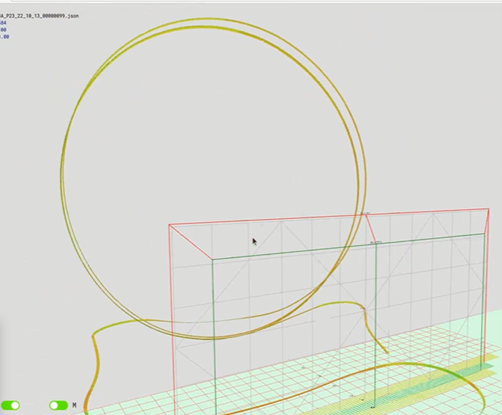
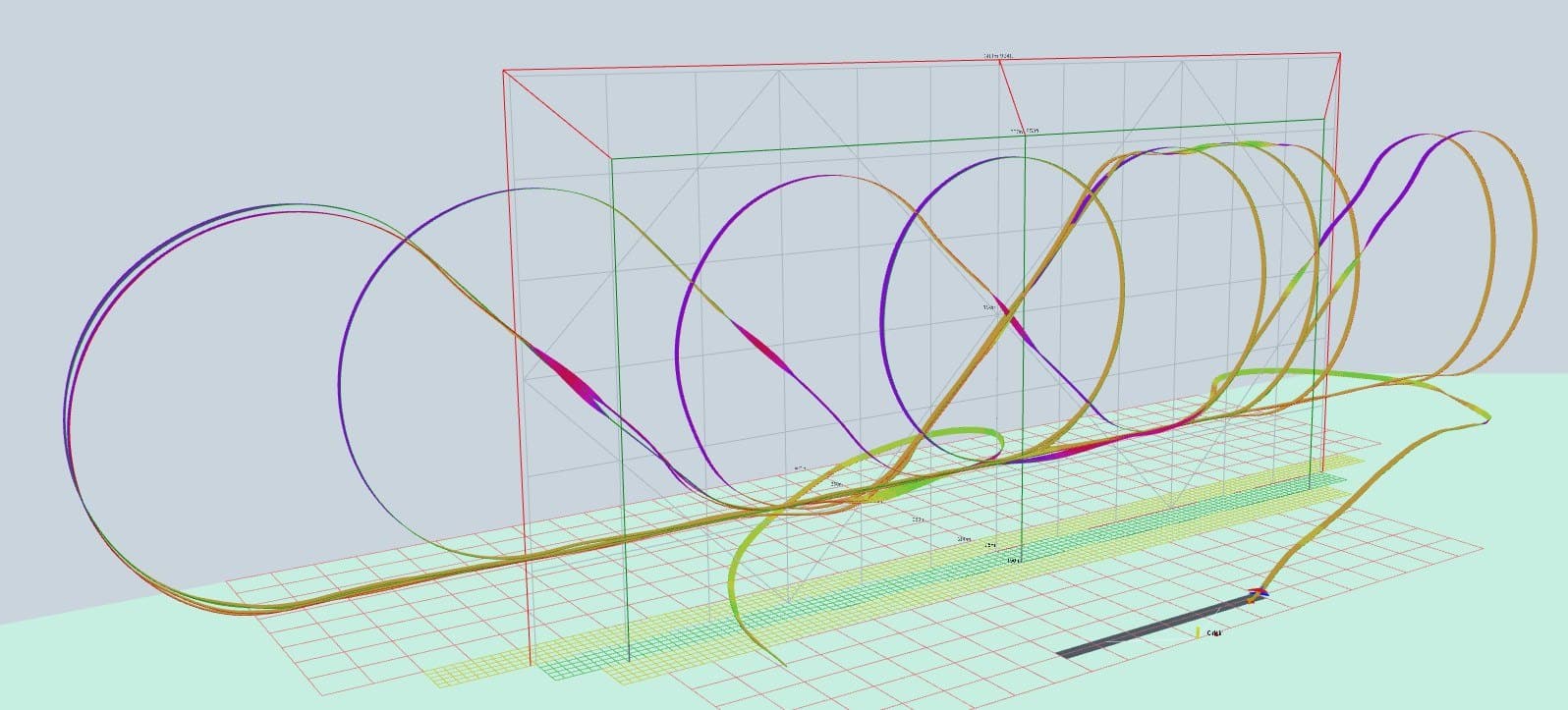
A quick teaser… This picture does not look very interesting - just a rectangular circuit… but actually on close inspection the model is in knife edge flight for the circuit - and navigating the whole time… so wind correcting, etc and just as simply the model could be rolling for the whole circuit… interesting and exciting stuff!
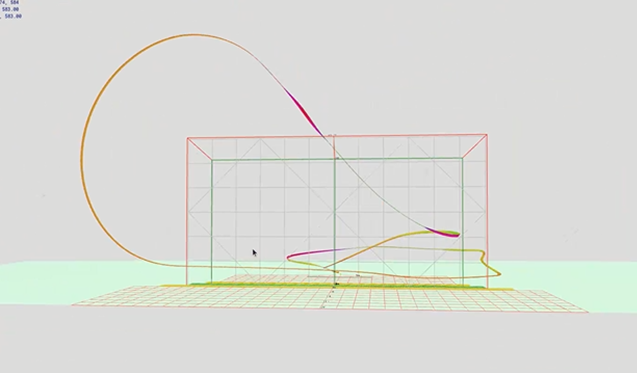
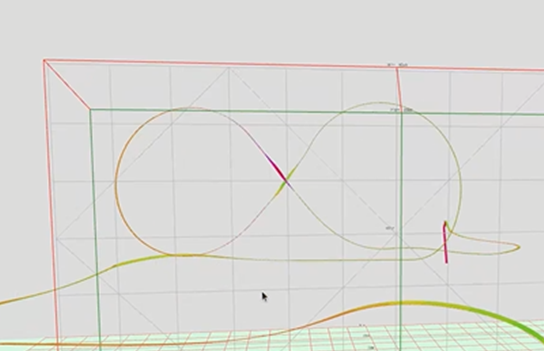
Out in real life An example of a R/C Scale Schedule flown autonomously (find the barrel roll!) and the NZ Clubman Aerobatics Schedule… using my old Galactik 2m F3A model… I think it is working rather well