Hi guys, I have a serious problem with my Helicopter in Acro mode (pixhawk 4). It is very difficult for me to explain what happens, so I have posted a video. Could you please help me to understand how to fix this problem?
(motor and tail servo work good, the problem is only relative to the swashplate control)
@Avro93 the Acro Mode is not broke. The Acro Mode in ardupilot is not designed the same way as commercial 3 axis helicopter stabilization systems. So doing this test on the bench will NOT give similar results to a 3axis gyro or FBL. Once armed small cyclic inputs will result in the swash tilting and holding the tilt angle when tested on the bench. This is due to the flight control system tracking the pilot’s inputs and determining a target attitude from those inputs. The controller then drives the aircraft to that attitude. If the controller can’t do that because the helicopter is not actually flying then you can expect the swash to tilt and stay there.
This Acro Mode was designed as an rate command system with attitude hold. When you displace the cyclic stick you command an angular rate and when you center the stick, it holds the attitude. @ChrisOlson is joking in a way. To pilots that come from RC helicopter world and have flown flybarred or heli’s with FBLs, this mode seems foreign and unnatural. We have recently designed a variation on this mode that makes it behave similar to an FBL or flybarred heli.
So the Acro Mode is not broke. But if you want to post your param file, I can look at it and make sure your set up is sound.
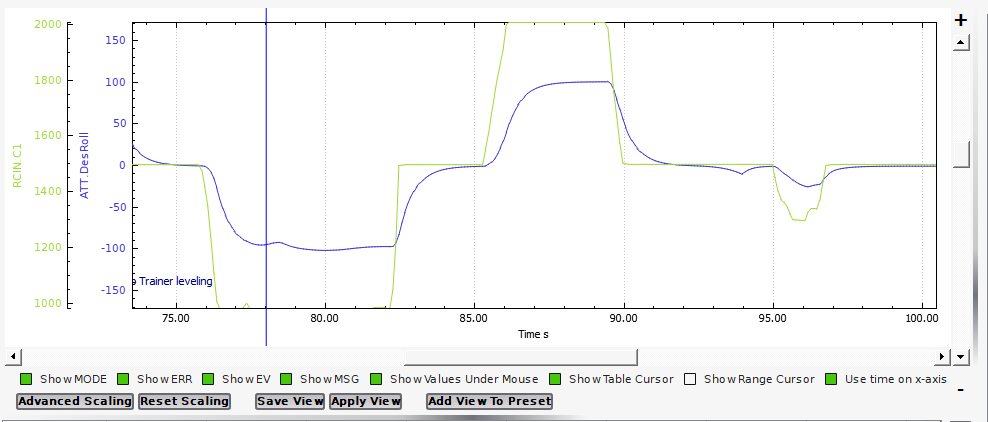
Yeah. During testing of VBar mode the furthest away I could drive the desired attitude was 100 degrees with full cyclic deflection, with the decay rate set at 2.0. Notice how it comes back if the frame don’t move, and how it manages to smooth out a rough stick input around 96 seconds. VBar is just plain cool, and I have the maximum frame rotation acceleration and rates set fairly low in this heli.
The logging still calls it Trainer leveling in the GCS. I stole that for VBar because acro leveling don’t work anyway.
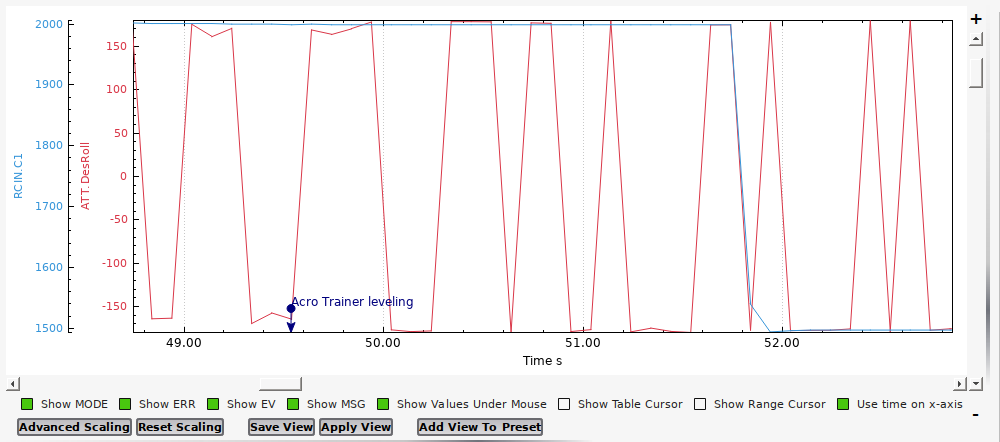
All it does in Rate mode is drive the desired around in a continuous circle. Once it goes past 360 it goes totally nuts and sets off a wild gyration in the swashplate. I guess if I was a heli pilot setting up my helicopter and seen that, I’d be afraid to fly it if I didn’t know how it works.
Bill, once this wild gyration of the swashplate starts, even with the stick centered it won’t stop. Even switching to (what is in this case) VBar won’t stop it. The only way to stop it is to switch flight modes.
Leonard has insisted this is not a problem. But is a problem if somebody would hold a cyclic deflection during runup and set it off. I really think we need to modify acro to force it to use VBar until the land_complete flag goes false. VBar does not do this.
Thank you guys, but this is not the main problem. Indeed the Helicopter flies very well in Acro if the sticks are used gently … However, as you can see in the last seconds of the video, the main problem is the Crazy movement that the Swashplate does when I push the Stick in FULL front Position (or in other FULL directions). With this command, the swashplate starts to tilt in all directions without sense and control.
When I’ve tried a tonneau this uncontrolled movement has created the risk of a crash. I had salved the helicopter switching it in stabilize mode and thanks to the high altitude.
Please pay attention to the last seconds of the video, only in this part you can see the main problem in action.
Hi Marco,
Do you have the log file from the flight where you saw this behavior? I think it is difficult to explain the behavior with it on the bench. With large stick inputs on the bench, you are driving the target attitude beyond 180 in roll or 90 deg in pitch. So that is why you are seeing this flipping of the swashplate. Why it continues to do that after you center the stick, I cant explain. If we could look at an in flight log of the issue, that would help us replicate it and determine the problem. Also it would be good to see your set up, it could be a tuning issue. I don’t know.
I’m sorry but i don’t have that specific flight log… but I can load one in which we have this movement (not in flight but with this behavior)
I’m asking if it is a problem for the board to fly with a pich that is over 90°, but quadricopters doesn’t has this problem…thay can fly inverted without problems…
I try to send this files… if you need anything else plese tell me
Just having a quick glance at your params, I believe that it is a tuning issue. Please read this wiki and watch the videos. Tuning guide
I will explain more when I have some time later today.
Thank you for the help!
I’m not the builder of this helicopter, but I have bought it from a drone builder. So some things are not simple for me to understand but if you can help me… I learn fast…
I ask you, if you find some bad params, to tell me why and how cange they.
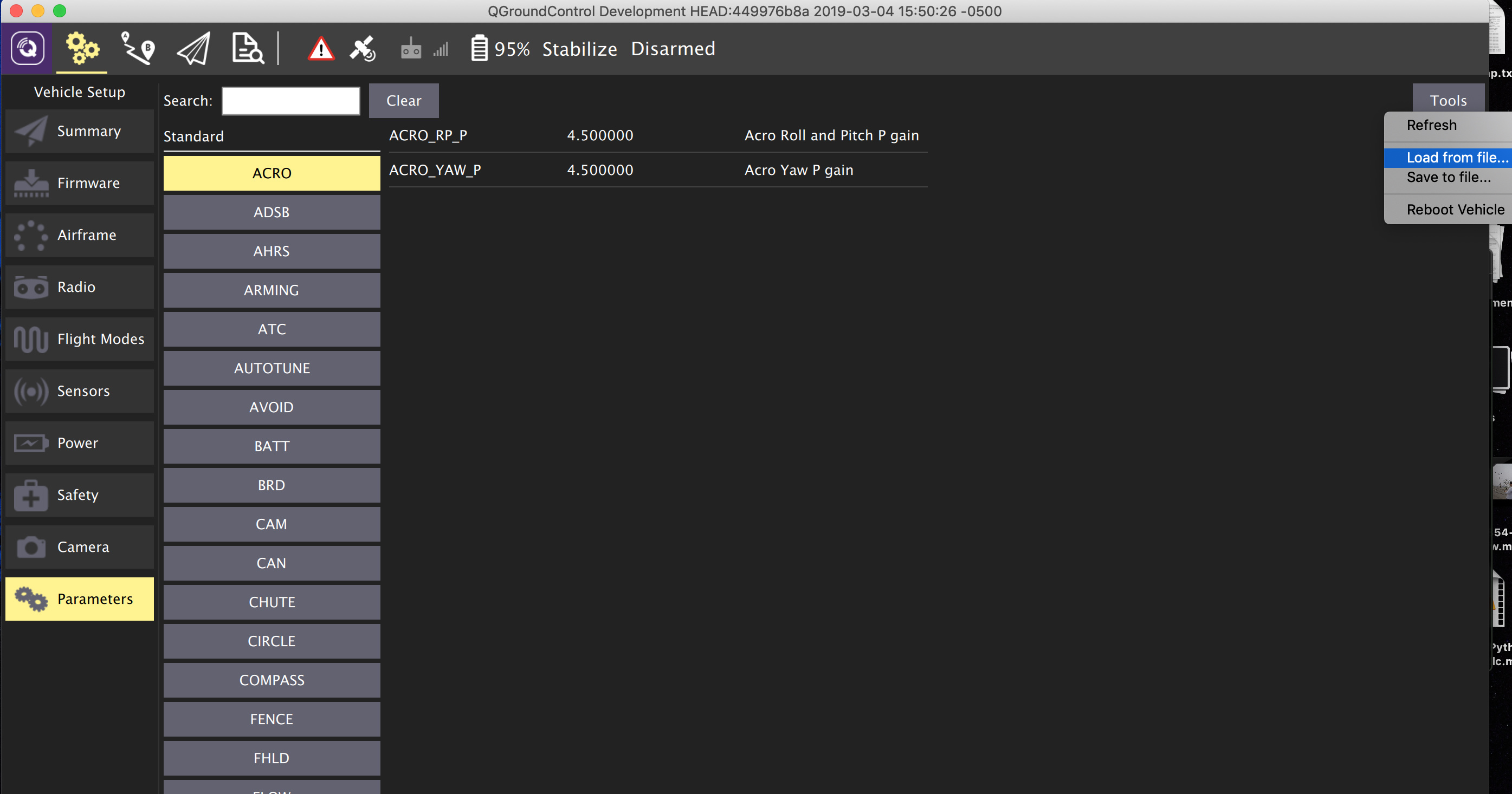
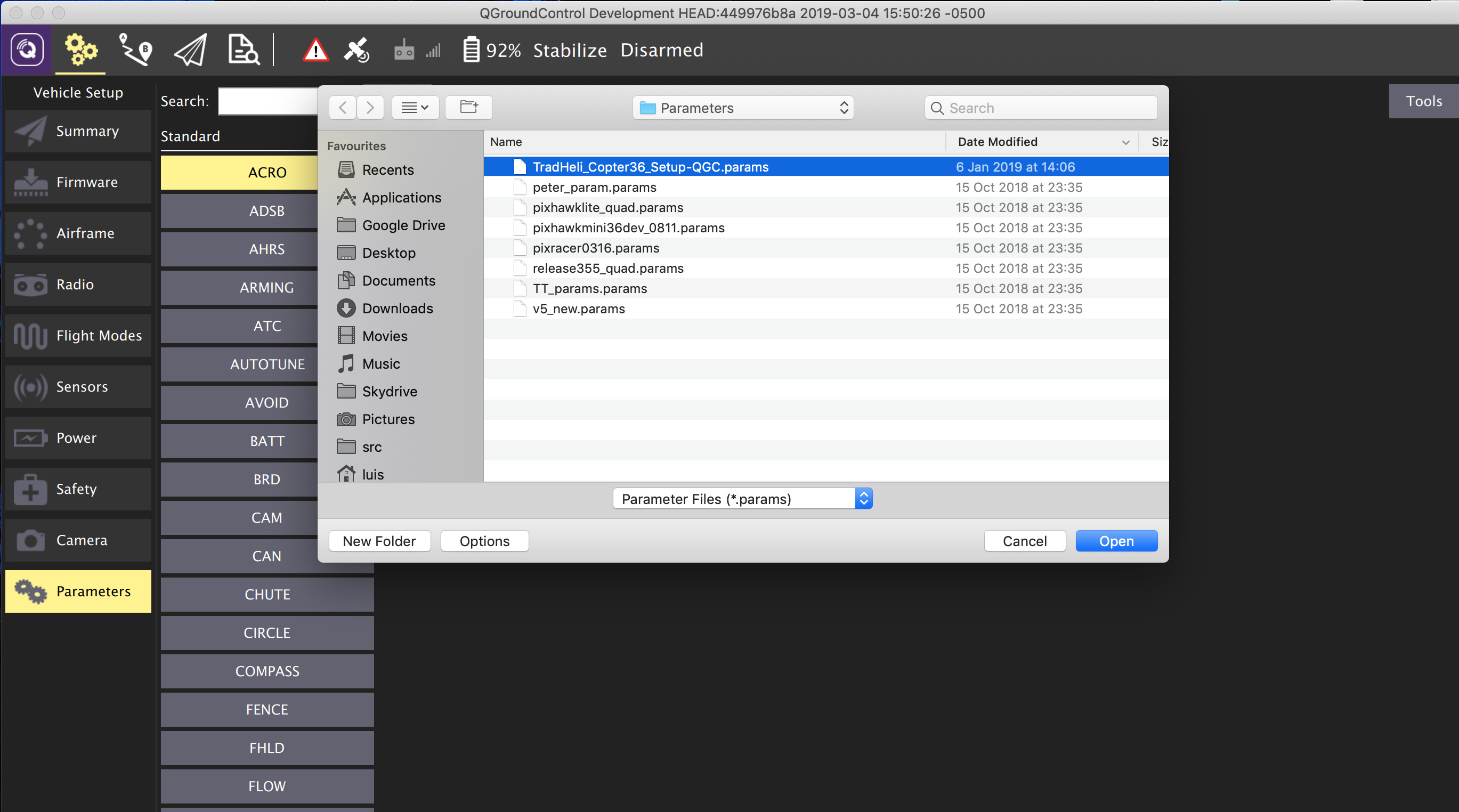
Marco, @ChrisOlson developed a universal setup that will provide good flying qualities for most RC helicopters. You can load it from the presaved setups in the Config/Tuning tab in mission planner or in QGC as well. I’m not as familiar with how to load the presaved parameters in QGC.
For mission planner, go to the config/tuning tab and click on Full Parameter List menu item on the left side of the screen. Once the full parameter list loads, you will see a drop down menu on the right. select the following set up TradHeli_Copter36_Setup-MP.parm and click “Load Presaved”. A listing will appear comparing the old and new values. Hit continue. Then you will have to click “Write Params” on the right side of the screen. It is possible that the tail gains might be too high for your particular heli. if you start seeing yaw oscillations or even pitch and roll oscillations, land immediately. In comparing your yaw rate PID parameters, it appears that what you have now is much higher than what is in the universal setup. So I think the yaw axis will be ok. Try this setup and see how your helicopter responds. let us know how it goes.
Just make sure you have the right firmware. The .bin log was from Copter 3.6.7 The param file that was posted came from Copter 3.5. The configuration files are for Copter 3.6.x
Bill, I don’t have problems with tail… Why are you talking about it? Mi problem is ONLY on te SWASPLATE in the MAIN rotor… and only in acro mode… the tail works very good ever
Please watch the video (mostly in the last seconds)
Thank you
Moreover, can I have a link for download the parameter list “TradHeli_Copter36_Setup-MP.parm”
Chris,
My board has installed the last firmware suggested from my Mission planner…
I don’t understand if and why this is a problem for you… I’m sorry for my incompetence but all this is new for me…
Hi Marco,
I realize that the tail is not your problem. However using this general set up parameter file is the easiest way for you to get flying. I don’t have the time to walk you through tuning your helicopter. That is why Chris and I put together the wiki on helicopter tuning. I know this is a complicated set up but we try to provide tutorials to give you knowledge to do it yourself. Which benefits you in the long run. If you have questions along the way, I am always willing to help.
I believe the issue that you’re seeing is definitely a tuning issue. Once you improve the tuning of the helicopter you should see a response similar to that of the multi copter’s.
Our new Acro VBar mode that we invented for helicopters also totally gets rid of the swashplate problem. But the helicopter still needs to be tuned properly.