I just saw the logs posted were 3.6.7. But the param file you posted was from Copter 3.5. So I just wanted to make sure you know that the tuning parameters provided are for Copter 3.6 and newer. They will not work in 3.5. Even the throttle curve is different between the two versions of firmware, and I notice you are using Mode 3 throttle curve control in the parameter file you posted from 3.5. So if you have upgraded from 3.5 to 3.6, but have not actually flown 3.6, also make sure you verify the throttle curve settings are right.
These were your throttle curve settings from the 3.5 param file
H_RSC_POWER_HIGH,630
H_RSC_POWER_LOW,610
H_RSC_POWER_NEGC,480
This is what you have in the param export from your 3.6.7 version:
H_RSC_THRCRV_0 250
H_RSC_THRCRV_25 320
H_RSC_THRCRV_50 380
H_RSC_THRCRV_75 500
H_RSC_THRCRV_100 1000
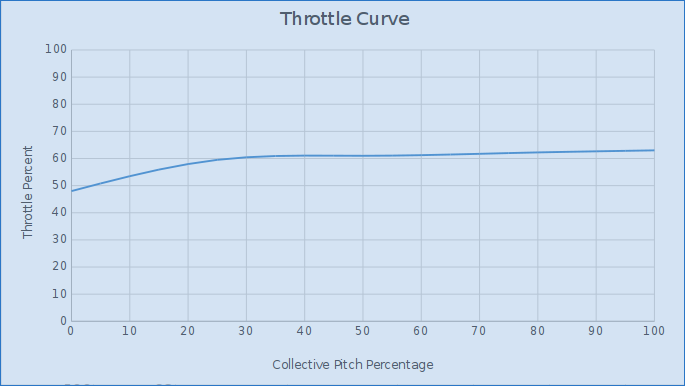
So these will have to be set to get the desired power. Suggested based on your old curve would be:
H_RSC_THRCRV_0 480
H_RSC_THRCRV_25 595
H_RSC_THRCRV_50 610
H_RSC_THRCRV_75 620
H_RSC_THRCRV_100 630
My suggested throttle curve settings would yield a curve that looks like this, which looks very reasonable for an electric helicopter running ~61% throttle
Thank you Chris, now it is all clear… Indeed i had noted a low power in the last flight…
Bad news guys… also with the new parameters the swashplate crazy movement persist…
I think that is a problem related to swasplate servos or rc signal…
For the rc, the motor lock is controlled from channel 8, maybe this creates the problem?
I had seen that the buider had exchanged 2 and 3 channels with 3 and 2 servo Position…
Maybe this create this little bug in acro mode…?
I really don’t understand why this bug/movement is done only with Armed MOTOR (with armed board only all works good…) For me is a problem related to Motor lock rc chanel 8…
Chris please tell me something about how I can use/install this new Acro VBar mode
Hi Marco,
The reason you only see this behavior with motor interlock enabled is due the motor interlock causes the full full flight control system to be operational. Up to that point, the target attitude is set to the current attitude so when you move and release the stick the swashplate follows your stick. After motor interlock is enabled the flight control laws determine the target attitude from the pilots inputs and attempt to drive the heli to that target attitude. Now with multirotors, you cannot see this behavior like heli’s can with the swashplate. I guess you could pull the props but I suspect you would encounter the same behavior. As I said, they share the same attitude controller.
Recently @ChrisOlson and I have been working the Vbar mode that he mentioned. He had mentioned in a PM that he encountered an unrecoverable situation when testing acro leveling mode. So I will get his flight data and see if I can determine what is happening.
I am sorry if you felt I was dismissing your concern but since this code is so complex, I don’t always trust what a bench test tells me. In situations like this, it is not realistic. That is why it is best to have flight data or simulation data to really see what is happening.
You say right Bill, but I don’t want to re-try this manouvre in flight… because with this problem the helicopter is very dangerous and i don’t want to crash it… I can try a simulation flight, but I have not idea to how to do it… If you have time to explane me how, maybe in this way we can find a solution
If we don’t find a solution, the only way is to downgrade the board at the drone builder’s firmware… and watch if this movement is still present (I have done 3 firmware upgrades without cange no one parameter… but all works good anyway… except acro mode)
I have a simulation I can use. I have tried to replicate this issue but have not seen it. You could also set up a simulation using realflight which is outlined here.
I suspect that this deals with the setup of the firmware. you can separately adjust the max pitch and roll rate that you can command with the stick using the ACRO_RP_P parameter. if this commanded rate is vastly different from the actual pitch or roll rate performance of the aircraft, then you could get into the target getting too far away from the actual. Which is what I suspect is causing the unusual behavior on the bench.
Bill,
Reducing ACRO_RP_P the effect is only to reduce the swashplate tilt angle, but the uncontrolled movement is still present… so in flight it will translate to a slower cange in helicopter tilt but after a little time we will have this uncontrolled oscillation anyway…
I agree is it quite hairy. It only appears to happen if you hold a full rate stick input for longer than 1-2 seconds. All the log shows is that the desired attitude constantly flips in a circle, it doesn’t tell why.
I think there is a runaway calculation in the code that is not being constrained properly. Our VBar mode that we invented for heli’s has a decay built into the desired attitude so it decays back to current (or what it thinks is current) attitude. This mimics a flybar. Since VBar mode doesn’t do it, that gives me a good idea of what the problem is in the code for Rate mode. There is a calculation going to infinity, causing a runaway loop in the desired attitude, I’m pretty sure. Once it goes into runaway, it won’t stop until you switch out of Acro. And I’m not even sure the SITL will show it because SITL doesn’t handle like a real helicopter and the SITL has totally unrealistic tuning from a real helicopter.
Marco,
Again I expected that it would result in the same response on the bench. What I’m saying is that it may not result in the same response in flight because the aircraft will actually keep up with the target attitude and you’ll never see a large discrepancy in attitude. But this is just a theory. I can’t stress enough how bench testng is NOT a good indicator of in-flight performance in certain cases. I believe this is one of those cases.
However I would agree that if this large attitude descrepancy were to occur in flight, the controller should allow the user to exit the condition without switching modes.
this is not true of the SITL combined with real flight. I have very realistic tuning. I will say that the aircraft flying qualities might be somewhat better than the real ones. meaning they tend to be more agile, but if I detune the controller I may see this. you should try real flight as an RC sim. I think it provides very realistic handling. I would agree that the ardupilot SITL’s flight dynamics model for a helicopter is very unrealistic.
Yeah, RealFlight probably has better math in it. The SITL is good to see if a chunk of code runs properly, but it’s not all that great for predicting how a helicopter will handle on a particular chunk of code. I tried to test some code for doing short over-run “ag turns” on survey flights with SITL, and it simply doesn’t work like the real thing.
For me, when it comes to RealFlight it’s like, it is easier to just load the code in a real one and go fly it. So my Thunder Tiger Raptor 716 is my Real Flight. That helicopter is incredibly powerful, handles like a dream, flies for 30 minutes on a tank of gas, long as the klunk in the fuel tank don’t hang up like it did the other day and shut the engine off in flight, it works great
I must ask you how to:
-Print the parameters (to do a comparation more easily)
-Find Helicopter firmware 3.5 (this specific version, because I want to try if flashing this version, it will resolve the swashplate problem.
I tried to flash old firmware and I noted that the oldest(3.5.2/3.5.3) presents the swashplate problem even without arm the motor, and the newest (3.5.5/3.5.7 ecc…)present the problem only with armed motor
It won’t fix it. The behavior was changed in unarmed state because pilots were worried about it for doing cyclic checks. But if you arm it, it will do the same thing.
Ferruccio said he recognizes that helicopter as he set it up with flybar head a couple years ago. He said if you come around Easter holidays at Fly&Joy airfield in Cividale he can help you for the first steps in getting it set up properly.
Cool. Ferruccio is a great guy and he will be glad to help you thru the steps. The leveling in the current Copter acro does not even work. I discovered this when we were developing a new acro mode for helicopters. We have some custom code for the acro that Ferruccio is familiar with as he helped develop it. So he may even recommend to use that instead of the Copter code because it is much easier to hover and fly with helicopter with the modified acro code. And it does not exhibit this strange behavior you are seeing.