@Murdoch,
What does your normal tune look like for the pitch axis? Can you send me a Param file for what you fly normally. When you added the P gain, the response gain was getting really high so it was good that you stopped the tuning.
As for my messages, it appears that the ATNH message, which records the results of the test, is not always being logged. So you can look at the MSG message and that is what is being sent to the ground station. There are a lot more messages to sift through but it appears to all be there.
It looks like my VFF tuning is not doing so well. It over estimated. Your VFF for pitch should be somewhere around 0.13. With just the rate D gain tuned, it is hard to say what the proper angle P gain should be. With Angle P of 4.5, the response gain peaked at 2.67. So how did it feel tuned with the autotune using just the rate D gain?
I may have to provide the option to allow users to set their own VFF until I can get the test to do a better job.
In roll, it responds very similar to what I expected based on my heli. The VFF has some variability but over all it is a much better. It required an Angle P of 10 to get the response gain up to 2.0 which is acceptable.
thanks
Bill
@bnsgeyer Hi Bill, Did some 380 size Roll and Pitch Autotune testing with I gain set to 0.05. I’m not sure why but there seem to be a lot yaw/heading changes compared to the first round of Auottune testing that I did. Seem to have a mind of it’s own.
@Murdoch@Steve_Mitchell@ZvikaF@picoflug
I have been working to improve autotune. I have made the VFF test smoother so it doesn’t violently snap back to the trim attitude. I have also been working on the angle P test. I will look to test it this week hopefully and get another version out this weekend. Thanks again for all of your testing and willingness to accept the added risk.
Regards,
Bill
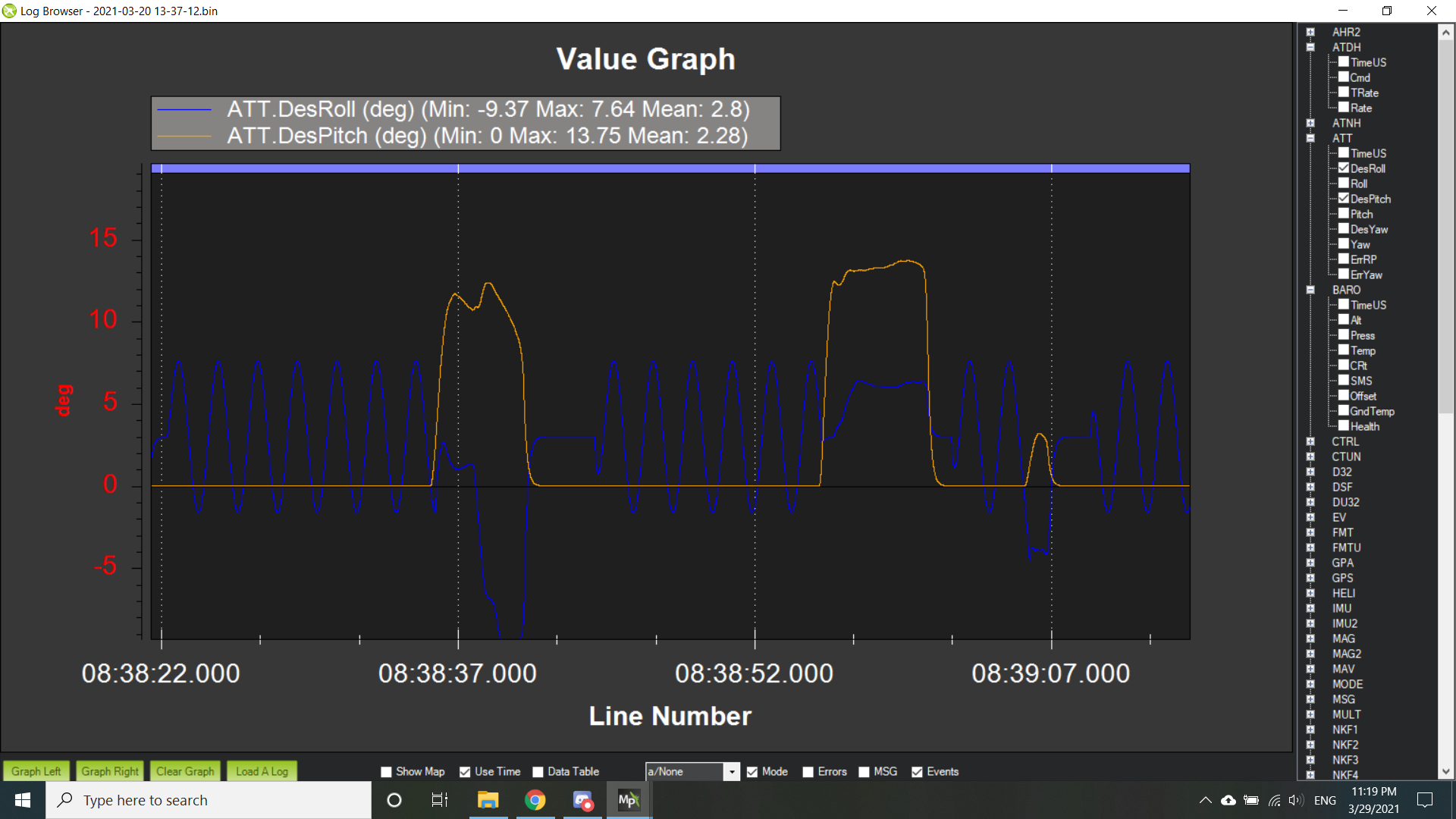
@picoflug I was able to look at your logs. For autotune in pitch and roll, autotune determines your VFF gain. When it moves on to determine the Angle_p gain, it never completes the first dwell. For some reason, it gets interrupted and starts over. This happens many times over and over. So it was unable to tune the angle P. I think the reason it has to start over many times was caused by you inputs being too large which causes it to think you want to pause the autotune.
You can see in the plot that your requested pitch attitude is greater than 5 deg. This causes the autotune to pause. I’ve designed it so you can make small inputs (< 5 deg) to help keep the aircraft stationary. What is causing you to make large pitch inputs? You could try leveling your swashplate. Looking at your PIDP.I plot, you’ll notice that it is greater than 0.5 which means that your swashplate may not be level.
In the yaw axis, it never even tunes the VFF. Hopefully my updates to the autotune feature will help this.
I wouldn’t spend any more time testing this version of autotune. I hope to have a new version out soon with the improved features.
Thanks
Bill
@Steve_Mitchell
I looked at the additional data that you provided. I’m seeing the same behavior in pitch and roll. Your response gain decays very quickly as frequency is increased. What kind of rotor system is on the 380? If you could post a picture that would be great. Based on this behavior I would guess that it is a very soft head, like a teetering rotor head with no dampeners. I would say that you will have to tune rate P and rate D gains and then try the autotune for the VFF and angle P.
@binsgeyer
Hello Bill,
i had bigger inputs because it was a bit windy. the swashplate is actually ok, but I will check it again.
Then I wait for the new version.
@ZvikaF thanks for reaching out! I thought I was going to release an improved version just before the ardupilot conference but I got caught up in preparing for that. At the conference, I was given a new idea and am in the process of implementing it. This new test method would give me better awareness of a range of frequencies in one 20 second test. It will probably be another month until I refine this and have it ready for you to test. Sorry about the delay.
Regards,
Bill
@picoflug Hi Holger, thanks for checking in on my progress. It has been a little slower than I expected. I found a paper that provided a simulation model of a Blade 360. So I put that as a model in the SITL in order to test out my changes.
I have the tests working but I am still trying figure out the best way to get a good tune. I think I am getting close using the simulator. But I still want to do actual flight test on my heli. So it may be another month before I release another version for the community to test.
Hi Bill, I was looking over one of my roll autotune flights and noticed the saved param ATC_ACCEL_R_MAX, 936903. Is this correct? It’s seem awfully higher than the recommended 110000 for a 380 size heli.
Steve, I designed the autotune to determine what the max acceleration the vehicle is capable of in that axis. So that is what your heli is capable of in the roll axis. I saved that number for the user so they know what the heli can do. Now there are a couple of other factors to consider when setting the parameter. 1) this doesn’t account for the delay to achieve the accel so I have to think of how to account for this in that number. 2) how much accel does the user want for good response. It clearly shows that heli’s are capable of generating more accel than we first thought but the delay still has to be considered when deciding on what number to use.
Hello, I am with grad interest this discussion because I am having trouble with the yaw stabilization. I have a TRex700 Gaser with a Holybro Durandal. I had a PX4 mini at the start but my helicopter was flying very badly on the yaw and I had big vibration problems, so I replaced it with the Durandal thinking that it will handle the vibrations better.
Can your PX4mini firmware work with Durandal?
Thank you.